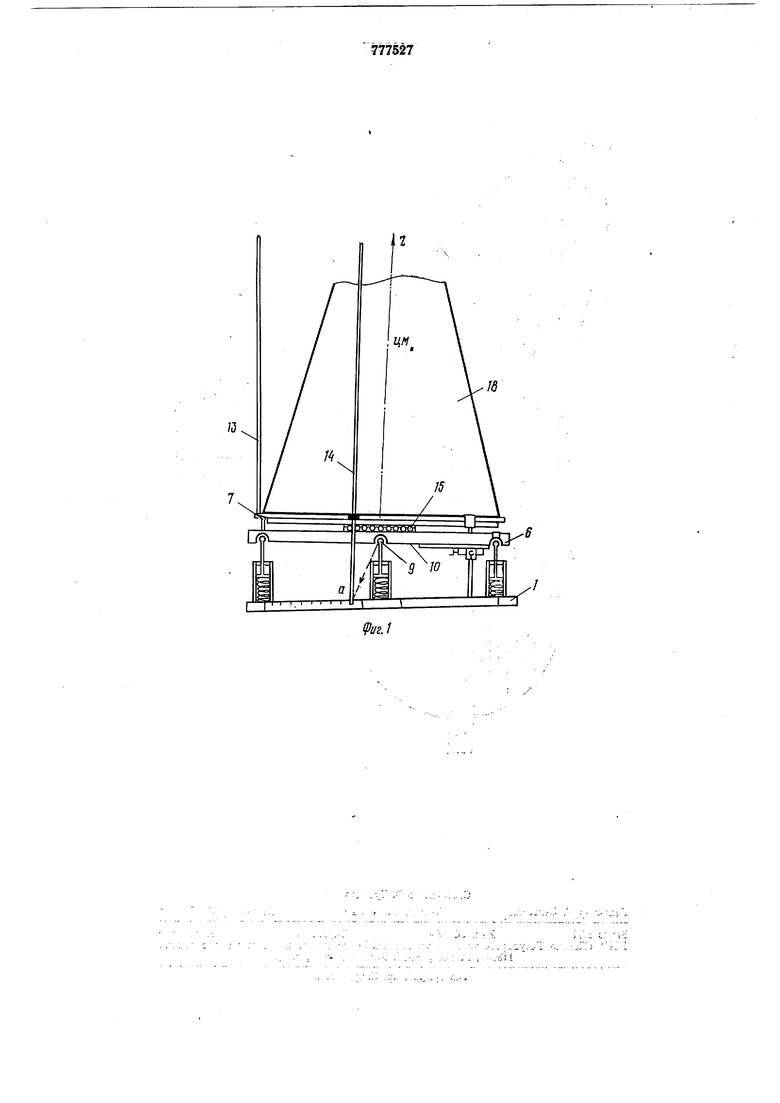
пендикулярной плоскости 16 стола, выдвижную рейку 17, соединенную со столом 8 и с платформой 6 и обеспечивающую подъем стола.
Источник 9 света должен быть установлен таким образом, чтобы его луч при горизонтальном положении платформы был направлен в центр О П1калы 11 и основания 1, а штанги 13 и 14 - так, чтобы соответственно их поворот и перемещение происходили в вертикальной плоскости. Центры основания 1, платформы 6 и стола 8 должны находится на одной оси.
Работа устройства заключается в следующем.
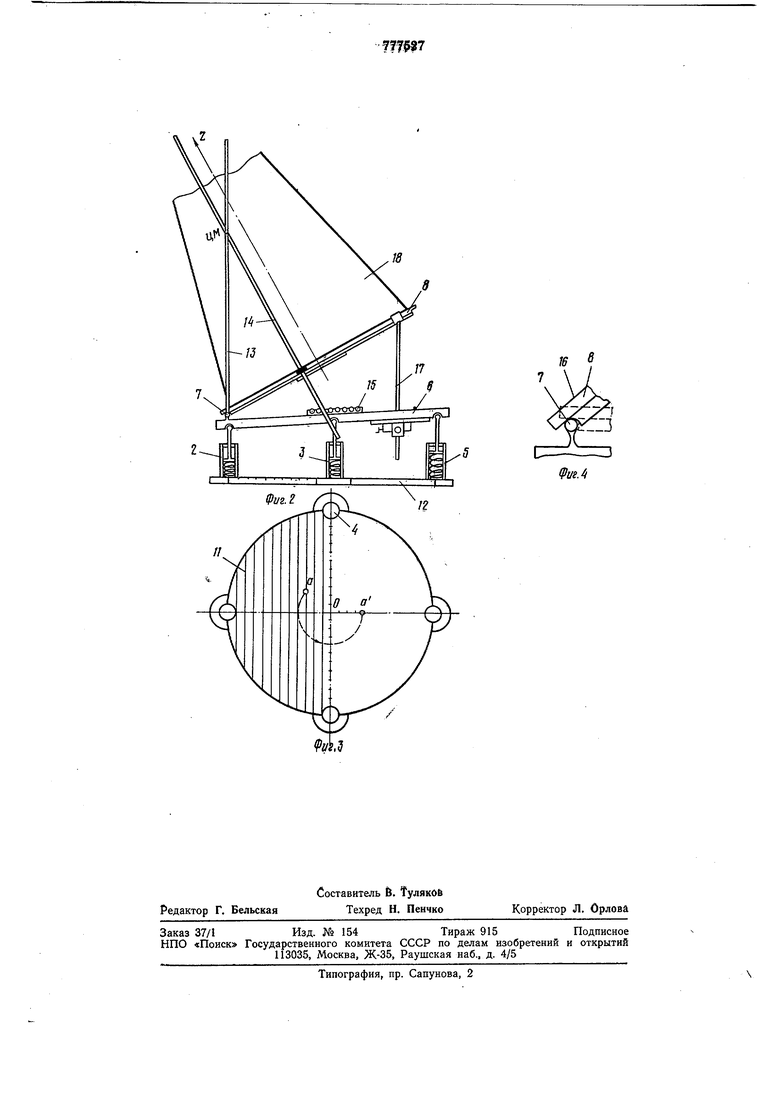
На стол 8 устанавливается изделие 18, геометрическая ось которого совмещается с центром стола 8. Если центр масс находится на оси изделия, тогда платформа 6 остается в горизонтальном положении и луч, исходящий из ее центра, будет в центре щкалы основания 1. Если центр масс изделий смещен от оси, платформа наклоняется в сторону смещения центра масс, а следовательно, отклоняется и луч (в точку а). Таким образом, определяется радиальное смещение центра масс (X, Y). Для определения координаты Z необходимо ннжний конец штанги 14 установить против деления шкалы, на котором находится луч (показан пунктиром), и зафиксировать в этом положении, затем развернуть стол 8 с изделием так, чтобы луч из точки а переместился в точку а . В этом случае штанга 14 проходит через центр масс изделия (вращение стола 8 с изделием массой до 500-700 кг можно осуществлять вручную, свыше 500-700 кг - установив привод). С помощью выдвижной рейки 17 стол 8 с изделием поднимается до тех пор, пока силоизмерительный элемент 5 не покажет реакцию опоры, равную 0. При этом штанга 14 зафиксирована теперь уже на столе 8, при
подъеме наклоняется вместе с изделием и, следовательно, проходит через центр масс изделия. Когда реакция равна О, то линия центра масс изделия проходит через щарнир 7 и, следовательно, находится, на штанге 13. Таким образом, пересечение штанг 13 и 14 образует координату центра масс2.
Привод рейки 17 может быть электрическим, гидравлическим и механическим - в зависимости от массы изделия.
Таким образом, устройство позволяет за одиу установку изделия определить все три координаты центра масс без каких бы то ни было вычислений, что значительно сокращает затраты времени.
Формула изобретения
Устройство для определения координат
центра масс изделий, содержащее основание, установленные на нем упругие силоизмерительные элементы, расположенную на них платформу, стол, шарнирно соединенный с платформой, отличающееся тем,
что, с целью повышения производительности, оно снабжено источником света, установленным на поверхность платформы, обращенную к основанию, шкалой, нанесенной на новерхность основания,обращенную
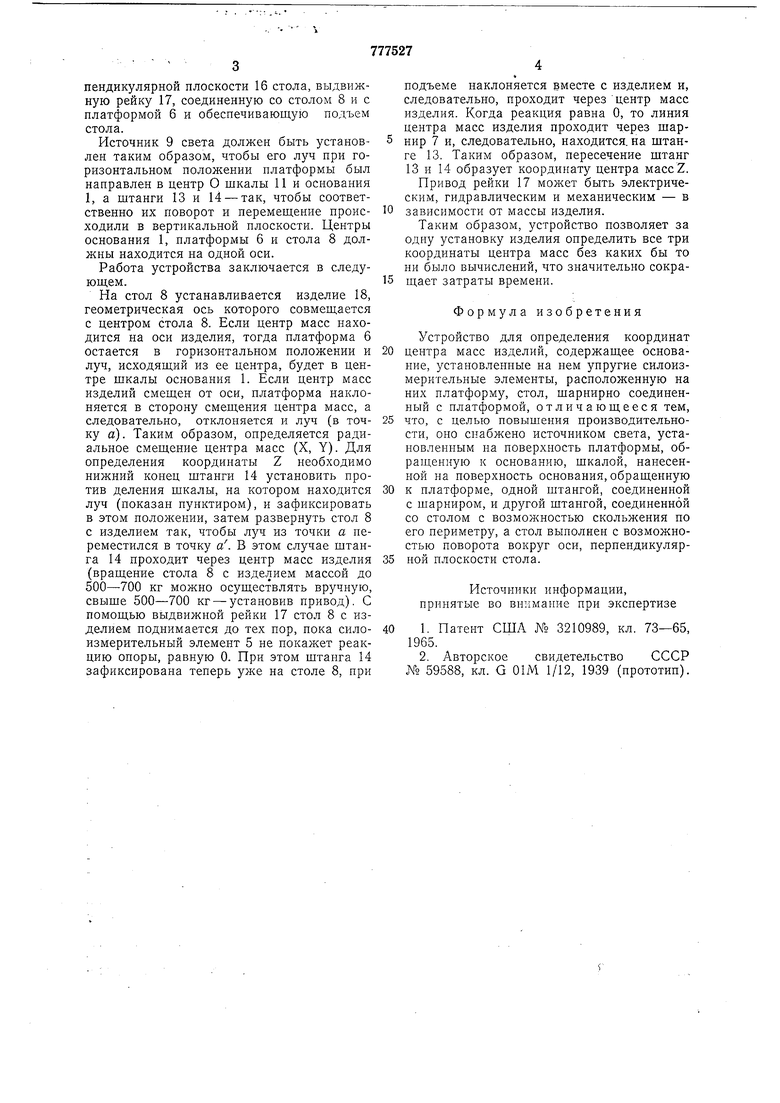
к платформе, одной штангой, соединенной с шарниром, и другой штангой, соединенной со столом с возмон ностью скольлсения но его периметру, а стол выполнен с возможностью поворота вокруг оси, перпендикулярной плоскости стола.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3210989, кл. 73-65, 1965.
2. Авторское свидетельство СССР № 59588, кл. G 01М 1/12, 1939 (прототип).
ю
8
(риг.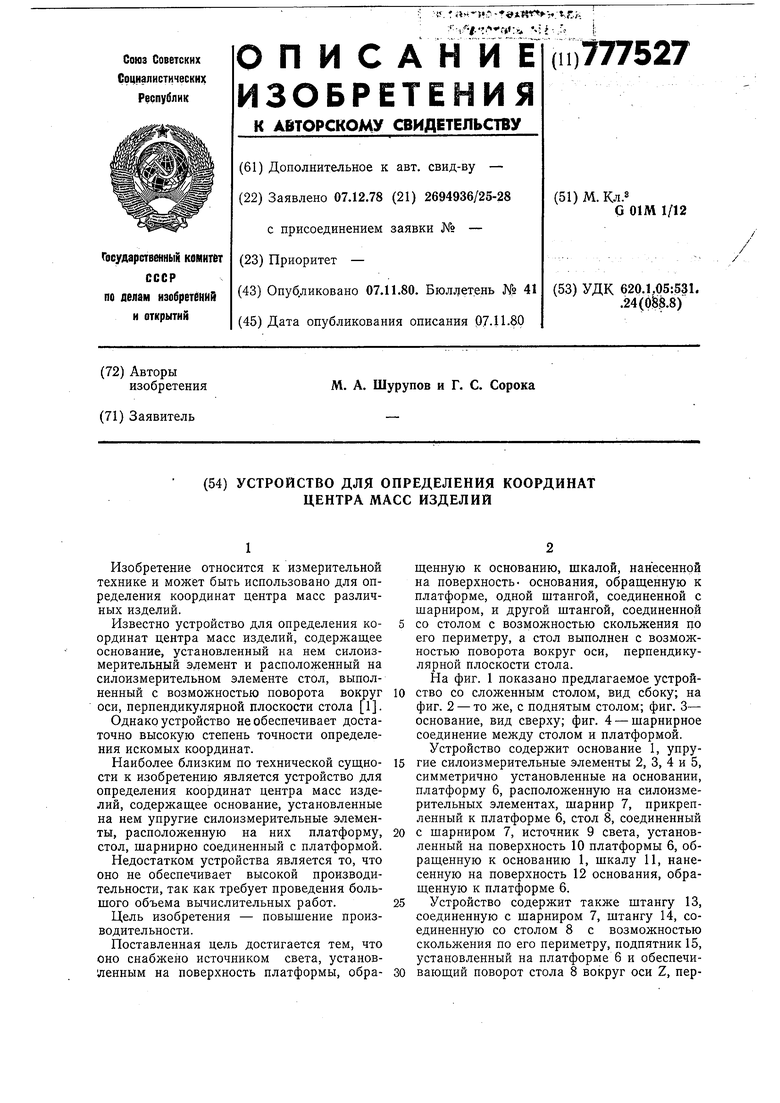
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для определения координат центра тяжести тела | 1989 |
|
SU1728689A1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| МЕТАЛЛОРЕЖУЩИЙ ГЕКСАПОДНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР И ГЕКСАПОДНЫЙ МЕХАНИЗМ ДЛЯ НЕГО | 2005 |
|
RU2299797C2 |
| УСТАНОВКА ДЛЯ ЭЛЕКТРОННО-ЛУЧЕВОЙ СВАРКИ | 1991 |
|
RU2027575C1 |
| Устройство для определения координат центра тяжести изделий | 1976 |
|
SU658417A1 |
| СПОСОБ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2013 |
|
RU2530428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485466C1 |
| Устройство для определения координат центра масс изделия | 1987 |
|
SU1467409A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| Способ создания сочетаний крен-дифферентных положений тяжелого изделия, имеющего гусеничный или колесный движитель, и стенд для его осуществления | 2023 |
|
RU2809962C1 |