(54) КОПИРУЮЩИЙ МАНИПУЛЯТОР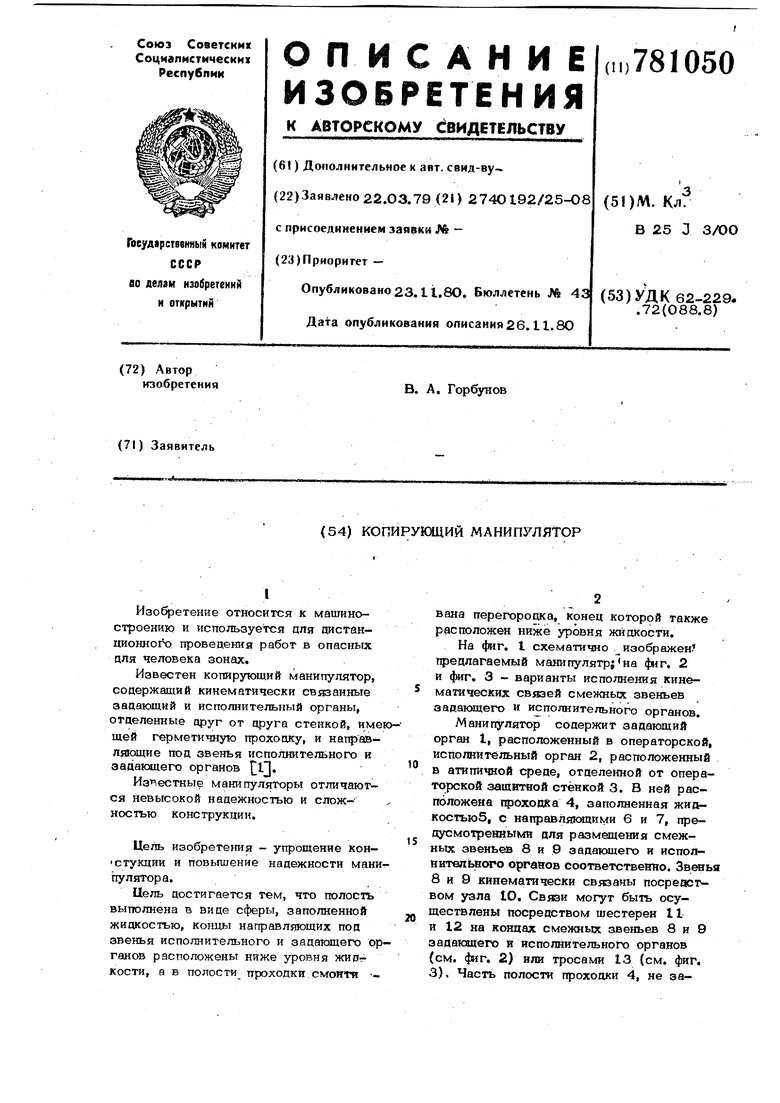
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU795936A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| Гидравлический манипулятор | 1973 |
|
SU479617A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691177C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Копирующий манипулятор | 1980 |
|
SU1024265A1 |
| Копирующий манипулятор | 1979 |
|
SU806401A1 |
| Герметичный манипулятор | 1979 |
|
SU1100080A1 |
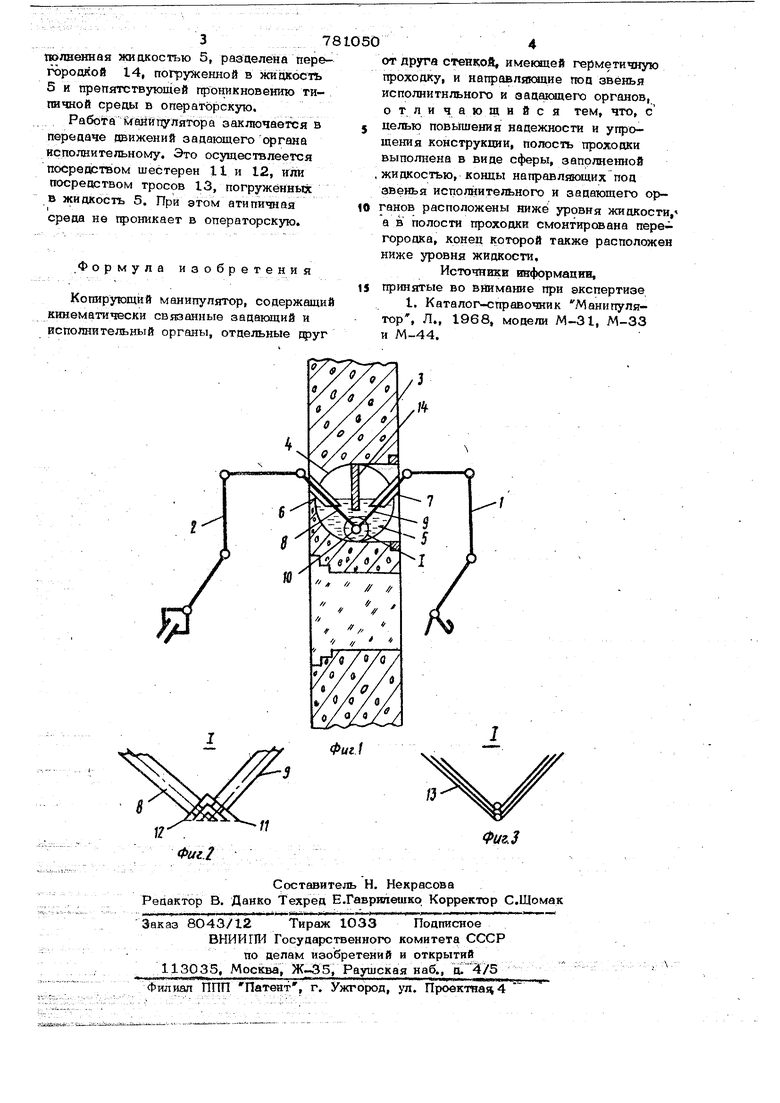
Изобретение относится к машиностроению и используется для пистанционногЧ) провеаения работ в опасных для человека зонах. Известен копирующий манипулятор, содержащий кинематически связанные задающий и исполнительный органы, отделенные друг от друга стенкой, име щей герметичную проходку, и направляющие под звенья исполнительного и эадакацего органов l. Известные мани пул5ггоры отличаются невысокой надежностью и сложностью конструкции. Цель изобретения - упрощение кон- стукции и повьпиение надежности ман пулятора. Цель достигается тем, что полость выполнена в виде сферы, заполненной жидкостью, концы направляющих под звенья исполнительного и задающего о ганов расположены ниже уровня жидкости, а в полости проходки смоктя вана перегородка, конец которой также расположен ниже уровня жишсости. На }нг. I схематично изображен предлагаемый манипулятр;на фиг. 2 и фаг. 3 - варианты исполнения кинематических связей смежных звеньев задающего и исполнительного органов. Манипулятор содержит задающий орган 1, расположенный в операторской, исполнительный орган 2, расположенный в атипичной среде, отделенной от операторской защитной стенкой 3. В ней расположена прохоока 4, заполненная жиокостъю5, с направлякицими 6 и 7, предусмотренными для размещения смежных звеньев 8 и 9 задающего я исполнитепьяого органов соответственно. Зветья 8 и 9 кинематически связаны посредством узла 10, Связи могут быть осуществлены посредством щестерен 11 и 12 на концах смежных звеньев 8 я 9 задающего и исполнительного органов (см. фиг. 2) или тросами 13 (см. фиг. 3). Часть полости проходки 4, не за
