Изобретение относится к машиностроению, в частности к копирующим манипуляторам для различных .отраслей народного хозяйства, и может быть использовано при работе в «горячих камерах, отделенных от операторского помещения стенкой.
Известен копирующий манипулятор, содержащий задающий и исполнительный органы, кинематически связанные между собой 1.
Недостатком известного устройства является то, что исполнительный орган такого манипулятора может действовать в ограниченной зоне, так как при значительных его вылетах и углах наклона задающий орган должен отклоняться от своего исходного положения на такие расстояния, которые превышают эргономические нормы движения руки оператора.
Целью изобретения является расширение зоны обслуживания и повыщение удобства пользования манипулятором.
Цель достигается тем, что задающий и исполнительный органы копирующего манипулятора, кинематически связанные между собой, выполнены в виде пантографных механизмов, при этом пантографные механизмы содержат неравное число параллелограммных звеньев.
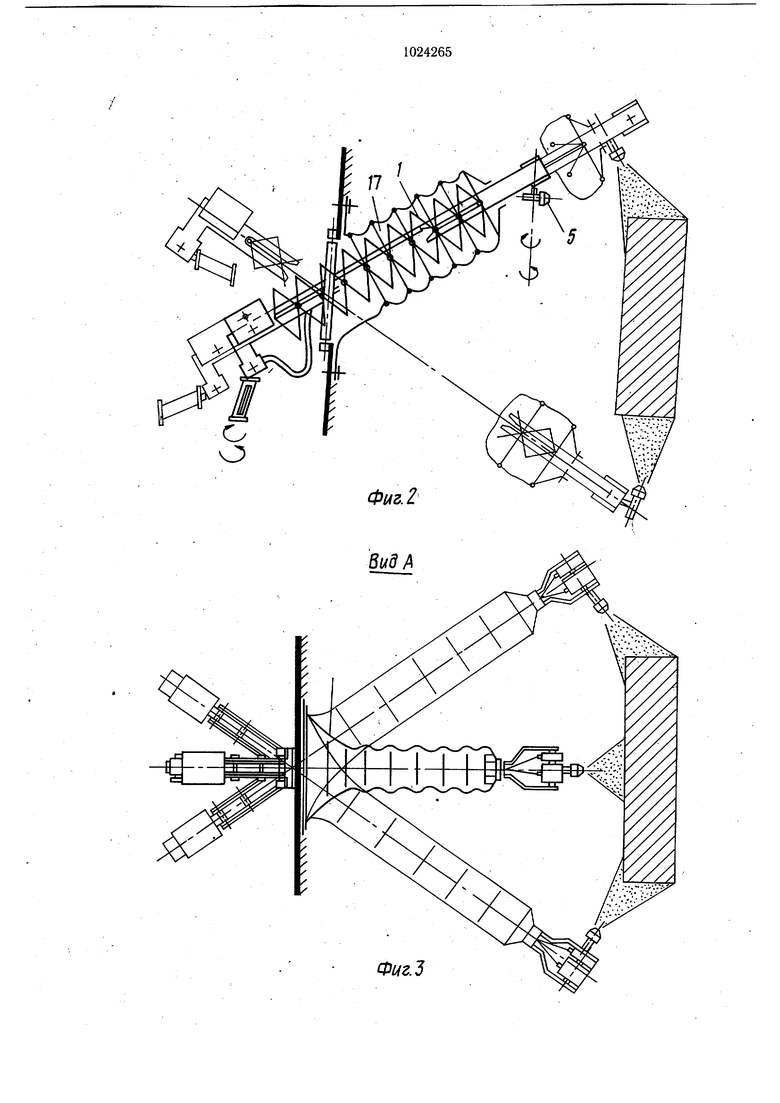
На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 - то же, рабочее положение; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 - вид В на фиг. 4.
Копирующий манипулятор состоит из пантографа 1, на крайних осях которого закреплены вилки 2 и 3, которые, в свою очередь, несут управляющую рукоять 4 и исполнительный механизм 5. Цантограф может поворачиваться вокруг одной из своих осей 6, которая закреплена на рамке 7, имеющей возможность поворачиваться вокруг вертикальной оси 8. Между щеками вилки 2 установлен механизм управления, содержащий рукоять 4 управления и редукторы 9 и 10. Корпус редуктора 9 установлен относительно вилки 2 неподвижно, корпус редуктора 10 имеет возможность поворота вокруг оси относительно вилки 2. Редукторы исполнительного механизма закреплены на вилке 3 таким, же образом. В каждом редукторе имеется шестерня 11, рейка 12, перемещающаяся на направляющей 13. К рейке прикреплена одним своим концом тяга 14. Другой конец тяги 14 прикреплен к рейке соответствующего редуктора исполнительного механизма. Тяги проходят в гибких оболочках 15, прикрепленных своими концами к корпусам редукторов ручки управления и исполнительного механизма.
ТягИ 14 и 15 при выходе из редукторов рукоятки управления образуют петлю, необходимую для манипулирования, а затем проходят внутри пантографу к редукторам исполнительного механизма. Редукторы исполнительного механизма отличаются от редукторов рукоятки управления тем, что они имеют вход гибких тяг с противоположной стороны. Пантограф со стороны исполнительного механизма закрыт гибким кожухом 16, опирающимся во избежание защемлени-я на рамки 17. Кожух 16 предохраняет пантограф от вредных воздействий и обеспечивает разделение сред.
Манипулятор работает следующим .образом.
5 Движения рукоятки при вытяжении или сжатии шарнирно-рычажного механизма соответствует движению исполнительного механизма, увеличенные пропорционально отношению плеч пантографа. Вилки 2 и 3 при этом всегда находятся на одной прямой,
0 наезжая или съезжая с осей пантографа. Все движения исполнительного .механизма симметричны относительно оси 6 движениям рукоятки управления.
Положения исполнительного механизма соответствуют положениям рукоятки управления.
При повороте рукоятки вокруг вертикальной оси поворачивается шестерня 11. При этом перемещается рейка 12 по направляющей 13, вытягивая или вталкивая тягу 14,
- которая перемещается относительно оболочки 15. Это относительное перемещение с малыми погрещностями передается к редуктору исполнительного механизма, в котором на соответствующую величину перемещается рейка и проворачивает зубчатое
колесо, связанное с исполнительным механизмом.
Вращение рукоятки вокруг горизонтальной оси осуществляется вместе с корпусом редуктора 10. В корпусе редуктора 9 при этом поворачивается шестерня, перемещая рейку, которая воздействует на тягу. Тяга передает перемещения на ответный редуктор исполнительного механизма.
Противовес 18, расположенный в центре масс меньшей части манипулятора, при перемещении манипулятора всегда перемещается на величину, пропорциональную перемещению центра масс большей части манипулятора. Таким образом, части манипулятора находятся в равновесии.
Использование предлагаемого технического решения позволяет расширить технологические возможности копирующего манипулятора, так как обеспечивает обработку, в данном случае окраску, значительных по габаритам и сложных по конфигурации изделий.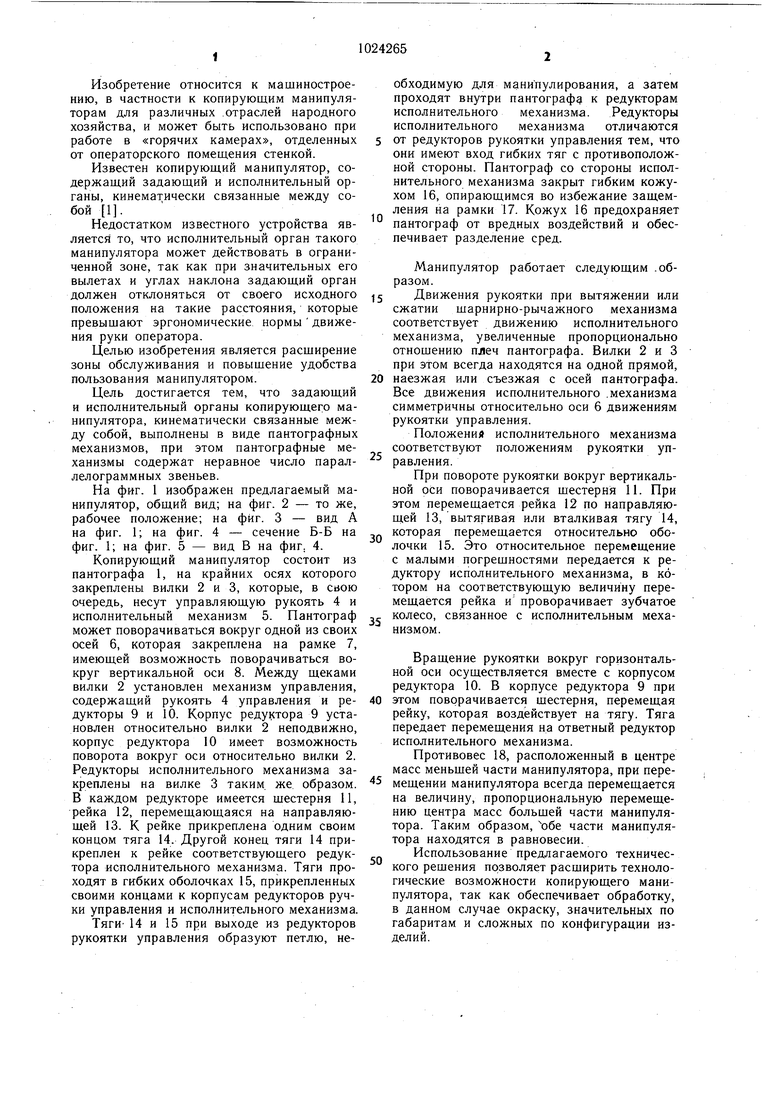
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Промышленный робот | 1978 |
|
SU847617A1 |
| Перегрузочный манипулятор | 1985 |
|
SU1247257A1 |
| Копирующий манипулятор | 1990 |
|
SU1696297A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1129067A1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2763624C1 |
| Копирующий манипулятор | 1980 |
|
SU933447A2 |
| Транспортное средство | 1979 |
|
SU880853A1 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
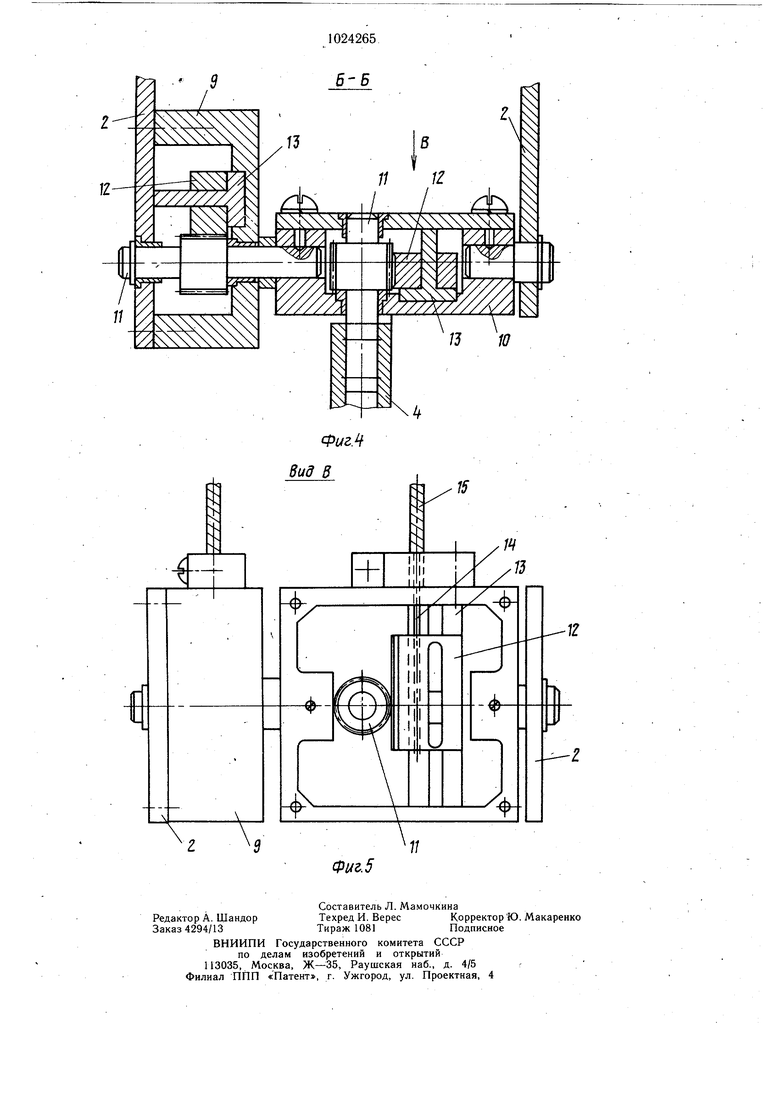
КОПИРУЮЩИЙ МАНИПУЛЯТОР для обслуживания «горячих камер, разделенных стенкой от операторского помещения, содержащий задающий и исполнительный органы, кинематически связанные между собой, отличающийся тем, что, с це,лью расщирения зоны обслуживания и повышения удобства пользования манипулятором, задающий и исполнительный органы выполнены в виде пантографных механизмов при этом пантографные механизмы задающего неисполнительного органов содержат неравное чнсло параллелограммных звеньев. (Л to 4 Ю О5 сл
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипуляторы | |||
| Каталог-справочник | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
