(54) КОНВЕЙЕР ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
| Полочный элеватор | 1980 |
|
SU874514A1 |
| Тележечный конвейер | 1985 |
|
SU1346528A2 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Конвейер для вертикального перемещения грузов | 1984 |
|
SU1191379A1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| Устройство для перегрузки мусора из контейнеров в мусоровоз | 1982 |
|
SU1161432A2 |
| Грузонесущий орган ленточно-цепного конвейера | 1990 |
|
SU1819838A1 |
| Устройство для перегрузки мусора из контейнеров в мусоровоз | 1982 |
|
SU1071533A1 |
| Устройство для перемещения и перегрузки грузов | 1985 |
|
SU1258788A1 |

1
Изобретение относится к устройствам для транспортирования грузов, а именно к конвейерам с бесконечными тяговыми элементами и может быть использовано для механизации подъемно-транспортных работ в производстве -электронных приборов.
Известен конвейер для вертикального перемещения грузов, содержащий укрепленные на каркасе звездочки, огибающие их две замкнутые несущие цепи с горизонтальными грузовыми платформами, оси подвеса которых шарнирно смонтированы на вынесенных за линию перемещения цепей концах опорных рычагов, вторые концы которых шарнирно закреплены на цепях, V-образные поперечины, жестко связанные с грузовыми платформами через оси подвеса с двумя роликами на свободных концах, взаимодействующими одновременно с двумя замкнутыми направляющими, образованными наружными и внутренними опорными поверхностями и выполненными с разрывами на обеих опорных поверхностях при пересечении друг с другом на участках изменения направления движения в нижней и верхней частях уст.ройства.
В разрывах установлены взаимосвязанные рычагами и тягой стрелки, которые образуют свободный путь для каждого взаимодействующего со стрелкой ролика в прямом и обратном направлении движения по своей направляющей.
Нижние и верхние дугообразные направляющие устройства с механизмами переключения взаимосвязанных стрелок смонтированы на рамах, которые фиксируются с помощью пружинных устройств и имеют огра10ниченное перемещение относительно каркаса.
Устройство позволяет получить фиксированное горизонтальное перемещение грузовых платформ на всех участках траектории в прямом и обратном направлениях 1.
Однако эта конструкция имеет ряд су15щественных недостатков. Основным из них является наличие двух направляющих для создания направленного перемещения одновременно обоим роликам, связанных V-образной поперечной, так как одновременный
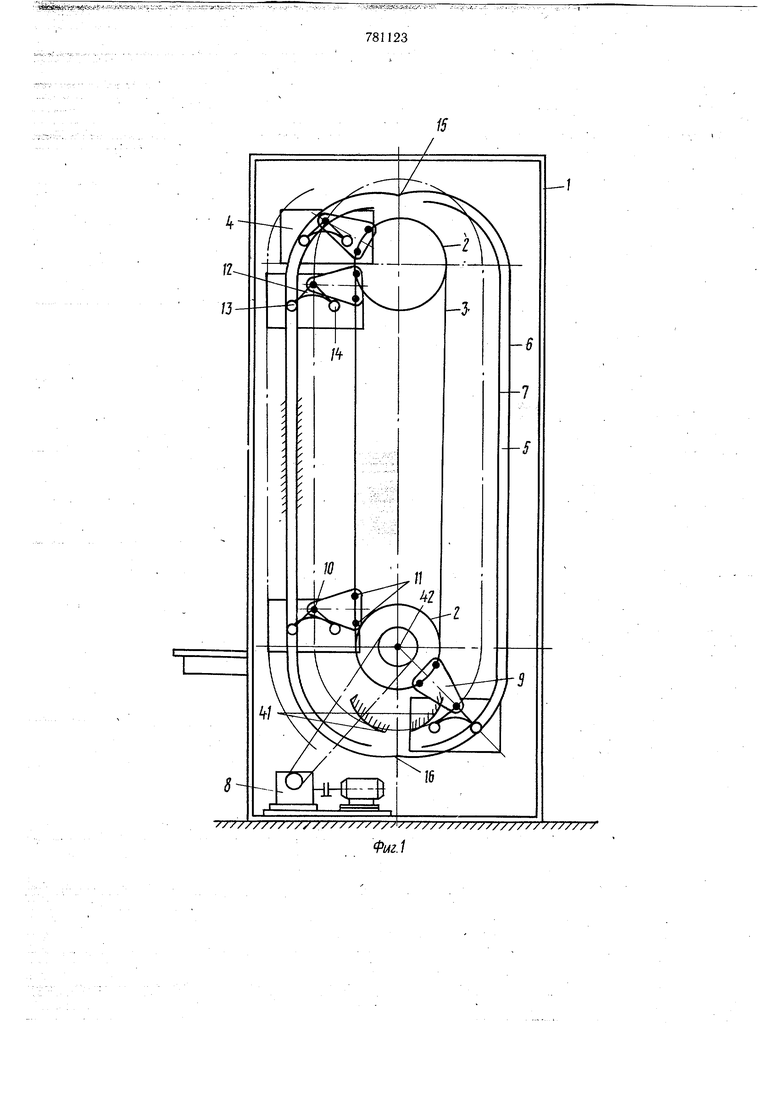
20 контакт роликов с опорными поверхностями , направляющих, без свободы для самоустанавливания, возможен только теоретически. На практике детали направляющих, V-образной поперечины и роликов изготавливаются с отклонениями от номинальных размеров, поэтому только один ролик из двух будет контактировать со своей направляющей или, в худшем случае, произойдет заклинивание роликов. Для компенсации погреилностей изготовления и сборки отдельных элементов двойные направляющие дугообразной формы в нижней и верхней частях устройства, образованные равными радиусами переменной кривизны, совместно с механизмом переключения взаимосвязанных стрелок смонтированы на рамах, которые имеют плавающее относительно каркаса крепления с помощью пружинных устройств. В результате конструкция устройства неоправданно усложнена и содержит значительное количество узлов и деталей, которые не вызваны необходимостью. Известен также конвейер для вертикального перемещения грузов, содержащий бесконечный тяговый элемент по меньшей мере с одним кронштейном, несущим щарнирно связанную с ним грузонесущую полку, на которой смонтирован правый и левый ролики, и направляющую для фиксации траектории движения роликов, образованную наружной и внутренней опорными поверхностями, последняя из которых выполнена с разрывами .на участках изменения направления движения 2. Увеличение числа разрывов, которые выполнены в известном конвейере на внутренней и внещней опорных поверхностях направляющей приводит к больщому числу ударов ролика о направляющую и к быстрому износу системы «ролик-направляющая, что усугубляется при больщих скоростях движения цепи. Кроме того, при транспортировании приборов, чувствительных к ударам, вышеописанный недостаток может быть причиной разрушения схем приборов и нарушения коммутационных цепей приборов с источниками питания, что приводит к увеличению брака продукции. Цель изобретения - повышение надежности работы конвейера и расширение, функциональных возможностей. .Эта цель достигается тем, что наружная опорная поверхность направляющейвыполнена сплошной, а на участках неустойчивого положения грузонесущих полок, на котором оси вращения звездочки тягового элемента, шарнира полки и находящегося в направляющей ролика расположены на одной прямой,,установлены ограничительные скобы для свободного-ролика. На фиг. I изображена схема конвейера для вертикального перемещения грузов, вид сбоку; на фиг. 2 - схема верхней части .:, конвейера с траекторией движения роликов, ...вид сбоку; на фиг. 3 - схема нижней части конвейера с траектррией движения роликов, вид сбоку. .SV - - -----,--:-------Конвейер для перемещения грузов содержит укрепленные на каркасе I звездочки 2, огибающие их две замкнутые несущие цепи 3 с горизонтальными грузовыми полками 4, направляющую 5, образованную наружной 6 и внутренней 7 опорными поверхностями, и цепной тяговый орган 8. , На каждой несущей цепи 3 для каждой полки 4 установлены два кронштейна 9, одни концы которых вынесены за линию перемещения цепей 3 и соединены шарнирно ггосредством оси 10, которая одновременно является орью подвеска полки 4 жестко на ней закрепленной, а другие концы шарнирно с помощью осей 11 соединены с цепями 3. С одной торцовой стороны полки 4 на конце оси подвеса 10, расположенной за кронштейном 9, жестко закреплена V-образная поперечина 12 с левым 13 и правым 14 роликами, отстоящими от оси подвеса 10 на равных расстояниях под углом а 90°. Таким образом, полка 4 иУ-образная поперечина 12 через ось 10 жестко связаны друг друг с другом. Ролики 13 и 14 взаимодействуют с направляющей 5, которая укреплена н.а каркасе 1, а для поочередной смены взаимодействующего с направляющей 5, ролика 13 или 14 созданы разрывы А и Б на внутренней опорной поверхности 7, причем левый участок направляющей 5 между разрывами А и Б служит для фиксации левого ролика 13, а правый участок - для фиксации правого 14. Наружные опорные поверхности 6 левоГО и правого участков направляющей 5 сходятся в точках 15 и 16. Траектория движения V-образной поперечины 12 с роликами 13 и 14 отмечена положениями 17-36, а вход и выход роликов 13 и 14 через разрывы А или Б, при смене взаимодействующего с направляющей 5 ролика 13 и 14, отмечен огибающими их линиями 37 для левого ролика 13 и 38 для правого ролика 14 (тонкие линии). На участках неустойчивого положения 39 и 40 полок 4, где оси вращения звездочки 2, подвеса 10 и находящегося в направляющей 5 ролика 13 или 14 расположены на одной прямой линии, установлены ограничительные скобы 41, радиуса R. Конвейер для перемещения грузов работает следующим образом. При включении цепного тягового органа 8 с пульта управления движение передается к валу от которого получают вращение звездочки 2. От звездочек 2 получают перемещение цепи 3 с полками 4, левый ролик 13 V-Образной поперечины 12 при этом катится по опорной поверхности 6 или 7 левого участка направляющей 5, в правый ролик 14 - по опорной поверхности 6 или 7 правого участка направляющей 5, создавая направленное перемещение полкам при сохранении постоянного горизонтального положеаи я н всех участках траектории в прямом и обратном направлениях. Перекатывание роликов 13 и 14 по наружной б или по внутренней 7 опорным поверхностям зависит от того, с какой стороны от оси подвеса 10 приложена сила тяжести полки 4. На участках изменения вертикального направления движения через разрывы А и Б на внутренней опорной поверхности 7 направляющей 5 происходит поочередная смена взаимодействующего с направляющей 5 ролика 13 или 14 без нарушения горизонтального положения полки. При вращении зтзездочки 2 по часовой стрелке и переходе V-образной поперечины 12 из гfoлoжeния 19 в положение 20 левый ролик 13 фиксирует горизонтальное положение полки 4 посредством жесткой связиУ-образной поперечины 12 с полкой 4, а правый ролик 14 через разрыв А приближается к точке 15 наружной опорной поверхности 6. В положении 21 оба ролика 13 и 14 взаимодействуют с направляющей 5, причем правый ролик 14 - в точке 15 наружной опорной поверхности 6. В положении 22 оба .ролика 13 и взаимодействуют с наружной опорной поверхностью 6. В положении 23 оба ролика 13 и 14 взаимодействуют с направляющей 5, причем левый ролик 13 - в точке 15 наружной опорной поверхности 6.. Движение роликов 13 и 14 по траектории V-образной поперечины 12 в положениях 28- 36 происходит подобным образом. При прохождении участков неустойчивогоположения 39 и 40 установлены ограничительные скобы 41 в плоскости движения роликов 13 и 14 и в направлении возможного опрокидывания полок 4 под действием силы тяжести, т.е. в направлении к валу 42 звездочки 2. Зазоры между роликами 13 и 14 и ограничительными скобами должны быть минимальными. V-образная поперечина 12 может быть расположена роликами 13 и 14 вверх от оси подвеса 10. В этом случае криволинейные участки траектории поменяют места, нижний с ограничительными скобами 41 окажется наверху, а верхний - внизу. Угол между осью подвеса 1C и роликами 13 и 14У-образной поперечины 12 предпочтителен, так как на вертикальных и горизонтальных участках направляющей 5 угол давления, от силы тяжести полки 4, «е-проходящей через ось подвеса 10, одинаков и равен 45°. Формула изобретения Конвейер для вертикального перемещения грузов, содержащий бесконечный тяговый элемент по меньщей мере с одним кронщтейном, несущим щарнирно связанную с ним грузонесущую полку, на которой смонтированы правый и левый ролики и направляющую для фиксации траектории движения роликов, образованную наружной и внутренней опорными поверхностями, последняя из которых выполнена с разрывами на участках изменения направления движения, отличающийся тем, что, с целью повыщения надежности работы конвейера и расщирения функциональных возможностей, наружная опорная поверхность направляющей выполнена сплощной, а на участках неустойчивого положения грузонесущих полок, на котором оси вращения звездочки тягового элемента, щарнира полки и находящегося в направляющей ролика расположены на одной прямой линии, установлены ограничительные скобы для свободного ролика. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3656608, кл. 198-138, опублик. 18.04.72. 2.Патент США № 2703643, кл. 198-137, опублик. 08.03.55.
781123
J
20
/Э
1Й
23
Z
25
16
Фиг..2
