Изобретение относится к промышленному транспорту, в частности может быть использовано в конвейерах, и является усовершенствованием устройства по авт. св. № 810575.
Целью изобретения является повышение надежности работы конвейера.
На фиг. 1 изображена кинематическая схема конвейера; на фиг. 2 - участок цепи с за.хватом на верхней направляюна d не выходит за габарит высоты цепи 1, т.е. за ширину пластины звена цепи 1. Благодаря предлагаемому устройству захваты 9 на направляюш.их 10 и 11 раз- меш,аются одинаково, опираясь на них боковинами d и не препятствуя опиранию на направляющие ни одного звена цепей 1. Скосы g на-боковинах d захватов 9 предусмотрены для обеспечения более плавного их движения при заходе на ролики 12,
нижней на15
шей; на фиг. 3 - то же, вид сверху; на Ю а носики h - для исключения случай- фиг. 4 - разрез А-А на фиг. 2; на фиг. 5 - ного переворота захватов 9 на верхних направляющих 10.
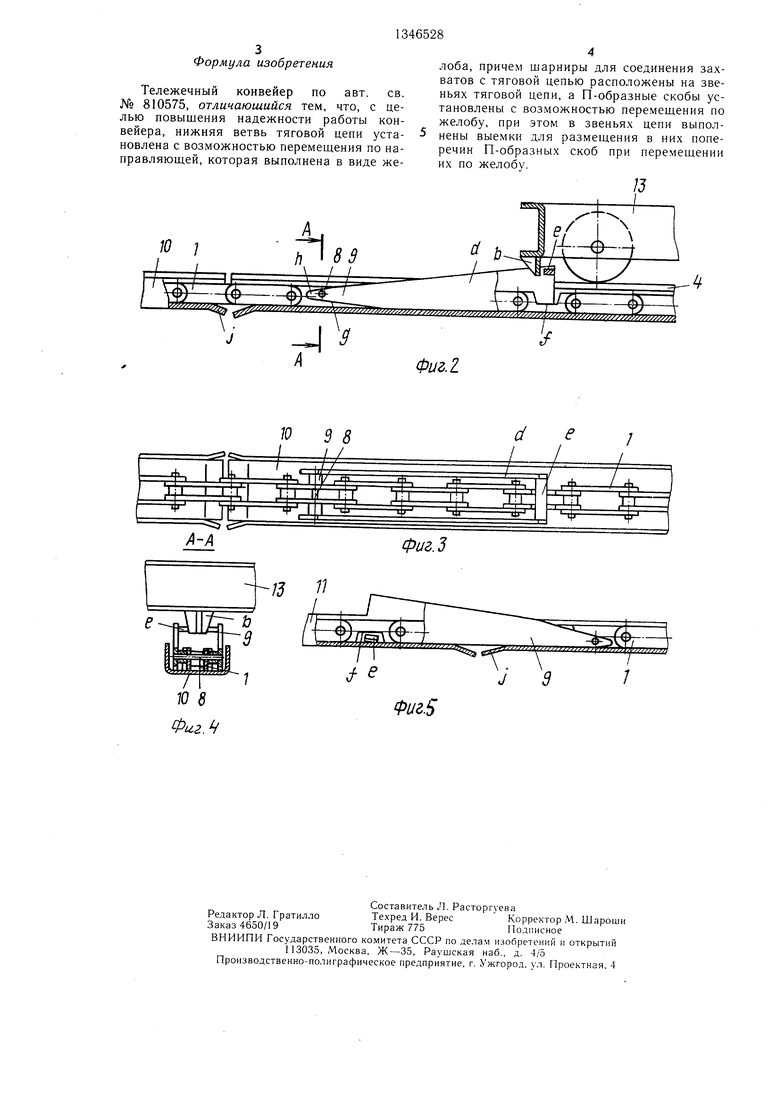
Для упрощения монтажа конвейера на стыкующихся концах отдельных частей управляющих сделаны отгибы j.
Для управления приводом конвейера и сигнализации о движении тележек 13 предусмотрены датчики 14 и 15.
Тележечный конвейер работает следующим образом.
После включения привода конвейера передние в своей паре захваты 9 в зоне ведомых Звездочек 3 поднимаются, при этом как бы одеваются на звездочки 3 до упора в их ступицы, а затем обкатываются боковинами d по роликам 12, выходят в гоучасток цепи с захватом на правляющей.
Тележечный конвейер содержит пластинчатые тяговые цепи 1, огибающие ведущие 2 и ведомые 3 звездочки и рельсы 4. Вал ведущих звездочек 2 установлен неподвижно, вал 5 ведомых звездочек установлен в опорах б, перемещаемых при натяжении цепей 1 посредством винтов 7.
Шарниры 8 для соединения захватов 9 с тяговой цепью 1 расположены на звеньях последней.
На горизонтальных участках тяговые цепи 1 установлены с возможностью пере20
- --, --1 1 мещения по верхним 10 и нижним 11 на- ризонтальное положение и заходят поперечинами е за передние упоры в тележки 13, подлежащей загрузке на конвейер.
правляющим, каждая из которых выполнена в виде образующего желоб п:веллера, лежащего полка.ми вверх. Каждая нижняя направляющая 11 имеет под ведущими звез- дочка.ми 2 криволинейный участок а, а над ведомыми звездочками 3 установлены на неподвижных осях ролики 12, обеспечивающие требуемую трае кторию свободных концов захватов 9 при огибании звездочек 2 и 3.
Тележки 13 ходовыми колесами могут перемещаться по рельсам 4 и для сцепления с захватами 9 имеют жесткие упоры: передние в и задние с.
Захваты 9 установлены на каждой цепи 1 парами. Расстояние между захватами в паре превышает на 100-200 мм расстояние между упорами вис тележки 13.
Каждый захват 9 выполнен в виде П-об- разной скобы, охватывающей звенья тяговой .епи 1 боковинами d и установленной с воз.чожностью перемещения ими по желобам - направляющим 10 и 11. Попе- речина е скобы при размещении захвата 9 с цепью 1 на верхней направляющей 10 располагается над выемкой f, выполненной в пластинах ближайщего к поперечине е звена цепи 1 для размещения в ней. поперечины е П-образной скобы при перемещении ее по желобу - нижней направляющей 11, при этом захват 9 перевернут, а его поперечина е расположена в выемке f. Боковина d в месте шарнирного соединения с цепью 1 имеет ширину меньшую, чем на свободном конце, а ось шарнира 8 размещена на пластине звена цепи 1 так, что в этом месте бокови
на d не выходит за габарит высоты цепи 1, т.е. за ширину пластины звена цепи 1. Благодаря предлагаемому устройству захваты 9 на направляюш.их 10 и 11 раз- меш,аются одинаково, опираясь на них боковинами d и не препятствуя опиранию на направляющие ни одного звена цепей 1. Скосы g на-боковинах d захватов 9 предусмотрены для обеспечения более плавного их движения при заходе на ролики 12,
а носики h - для исключения случай- ного переворота захватов 9 на верхних направляющих 10.
ризонтальное положение и заходят попере
чинами е за передние упоры в тележки 13, подлежащей загрузке на конвейер.
Перемещаясь далее вместе с цепью 1, захваты 9 скатываются с роликов 12 на на- правляюп.|ие 10 и, опираясь на них, ведут за собой тележку 13 по рельсам 4, а задние в паре захваты 9, аналогично поднявшись по роликам 12, следуют за тележкой 13. Одновременно другие захваты 9 в зоне ведущих звездочек 2 опускаются, опираясь на ступицы звездочек 2, затем проходят вертикальное положение, переворачиваются и оставив тележку 13, подлежащую разгрузке с конвейера, движутся, опираясь свободными концами на криволинейные участки а направляющих 11, которые обеспе- чивают траекторию свободных концов захватов 9, лишь незначительно выходящую за габариты конвейера. Остановившуюся тележку 13 за задние упоры с подхватывают задние в паре захваты 9 и сталкивают ее с конвейера на другой.
Датчик 14 дает сигнал об окончании загрузки-разгрузки конвейера, а движение цепей 1 продолжается до выхода захватов 9 в исходное положение, где конвейер отключается датчиком 15.
Поскольку положение цепей и захватов на верхних и нижних направляющих одинаково и нижняя направляющая выполнена, как и верхняя, в виде желоба, хорошо удерживающего смазку, использование предлагаемого изобретения позволит уменьшить из- нос конвейера, сократить расходы на его ре- монт и, кроме того, упростит конструкцию и сократит расходы на монтаж конвейера.
Формула изобретения
Тележечный конвейер по авт. св. № 810575, отличаюшийся тем, что, с целью повышения надежности работы конвейера, нижняя ветвь тяговой цепи установлена с возможностью перемещения по направляющей, которая выполнена в виде желоба, причем шарниры для соединения захватов с тяговой цепью расположены на звеньях тяговой цепи, а П-образные скобы установлены с возможностью перемещения по желобу, при этом в звеньях цепи выполнены выемки для размещения в них поперечин П-образных скоб при перемещении их по желобу.
У
Фиг. 2.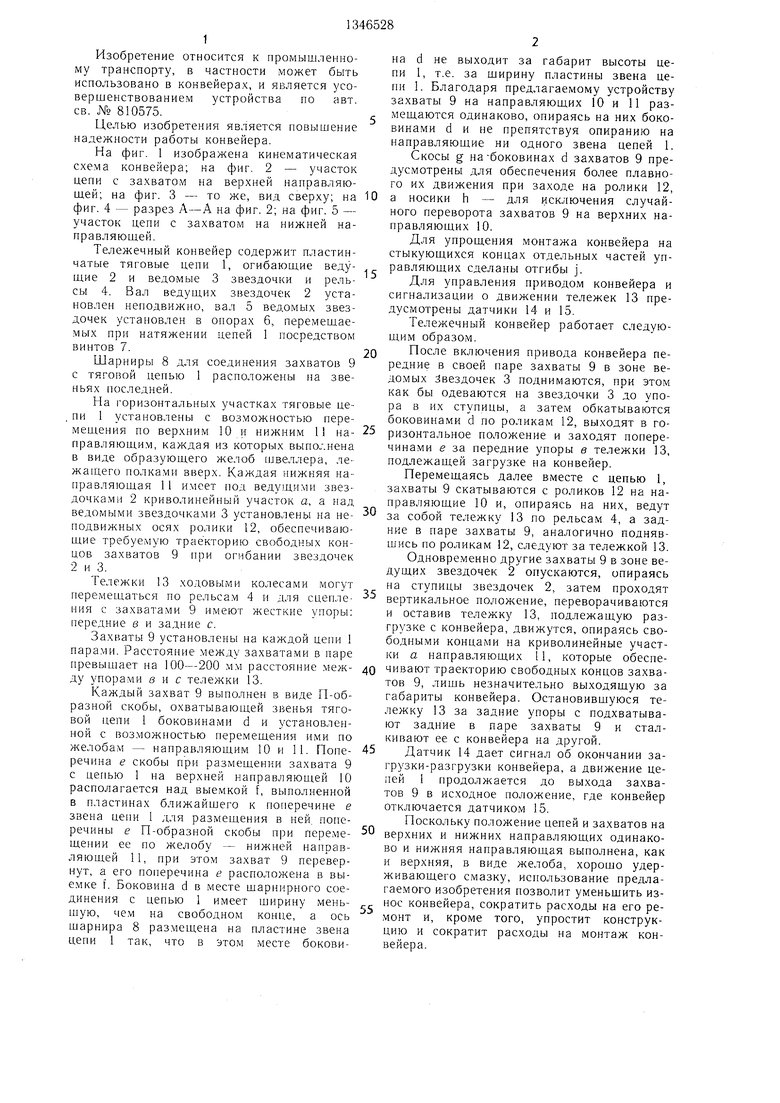
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1972 |
|
SU810575A1 |
| Устройство для перегрузки мусора из контейнеров в мусоровоз | 1982 |
|
SU1071533A1 |
| Устройство для перегрузки мусора из контейнеров в мусоровоз | 1982 |
|
SU1161432A2 |
| Агрегат для термообработки стеклоизделий | 1979 |
|
SU872471A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Конвейер-накопитель | 1985 |
|
SU1296491A1 |
| ГРУЗОВЕДУЩИЙ КОНВЕЙЕР | 1996 |
|
RU2120906C1 |
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ ТЕЛЁЖЕЧНЫЙ КОНВЕЙЕР | 1973 |
|
SU382560A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ | 2011 |
|
RU2479448C1 |
| Установка для изготовления строительных изделий | 1979 |
|
SU870155A1 |
изобретение относится к промышленному транспорту. Цель - повышение надежности работы конвейера, содержащего пластинчатые тяговые цепи 1, огибающие ведущие 2 и ведомые 3 звездочки и рельсы 4. На цепи 1 установлены захваты 9 в виде П-образной скобы. На звеньях цепи 1 расположены шарниры для соединения захватов 9 с цеггью 1. На горизонтальных участках цепи 1 перемещаются по верхним 10 и нижним 11 направляющим в виде желоба. В звеньях цепи 1 выполнены выемки для размещения поперечин П-образных скоб при перемещении их по желобу. Перемещаясь с цепью 1, захваты 9 скатываются на направляющие 10 и, опираясь на них, ведут за собой тележку 13. Задние в паре захваты следуют за тележкой 13. Другие захваты 9 опускаются, опираясь на ступицы звездочек 2, проходят вертикальное положение и переворачиваются, оставив тележку 13, подлежащую разгрузке. Далее эти захваты 9 двигаются, опираясь на криволинейные участки направляющих 11. Ос- тановивщуюся тележку 13 за задние упоры подхватывают в паре захваты 9 и сталкивают ее с конвейера. 5 ил. S (Л СО О5 СЛ ts3 оо Фиг.1 77 NJ
Ю 38
А-А
d
Фиг.З
Фиг.
Фиг5
| Тележечный конвейер | 1972 |
|
SU810575A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
