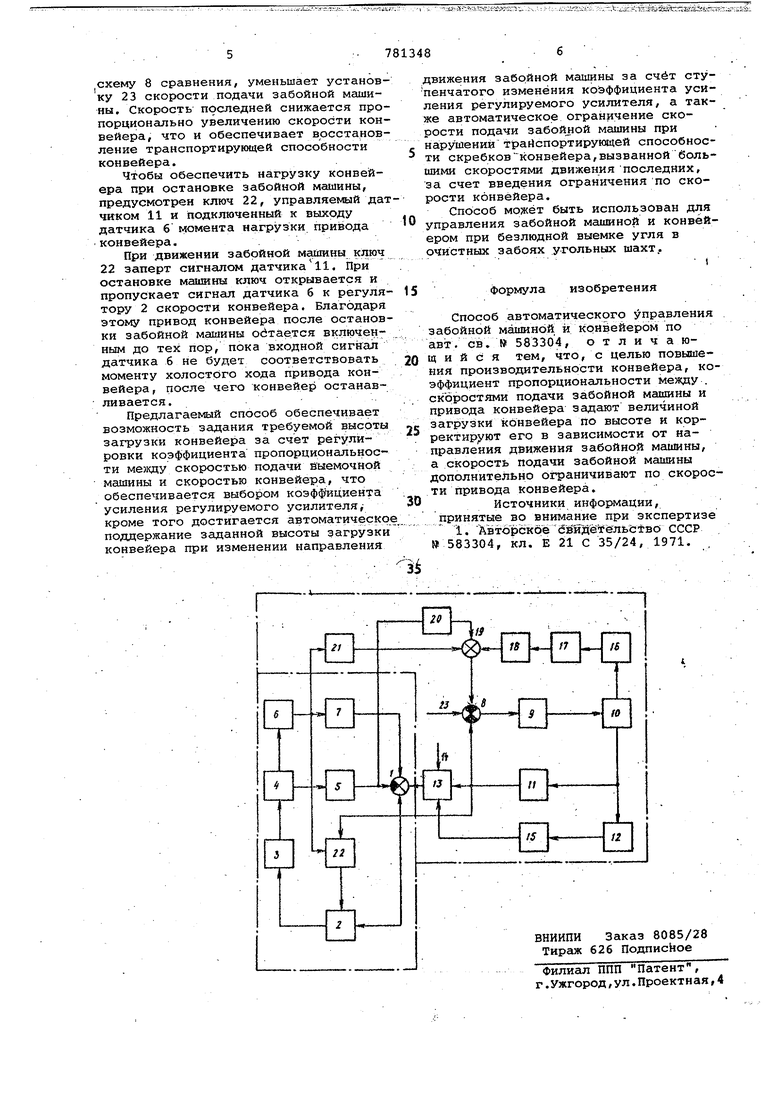
(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВДЕНИЯ ЗАБОЙНОЙ МАШИНОЙ Ш КОНВ1ЕЙЁРОЙ , --... Л изобретение относится к угбльной промышленности и предназначено для автоматического управления системой, включающей забойную машину и конзвейер.. .- По основному авт. св. 583304 известен способ автоматического управления забойной машиной и.конвейером, основанный на регулировании скорое подачи забойной машины по нагрузкам ее привода и привода конвейера, скорость -которого изменяют пропорционально скорости подачи забо ной машины и его перегрузке ВД. однако он не обеспечивает задание загрузки конвейера по высоте, так ка скорость дривода конвейера регулируют пропорционально величине скороети подачи забойной машины, а соотношение этих скоростей (которое опреде ляет величину загрузки конвейера по высоте) не регулируется; это приводит к недоиспользованию транспортиру ющей способности конвейера, к пересыпанию угля с конвейера и перегрузке его привода, что снижает производительность конвейера. Кроме того не учитывается необходимость ограничени скорости подачи забойной машины при достижении больших скоростей тягового органа конвейера, когда нарушается транспортирующая способность j скребков. Это приводит к пересыпанию угля за борт конвейера и к резким колебаниям динамических нагрузок на привод конвейера, что также снижает его производительность. Цель изобретения - повышение производительности конвейера. Поставленная цель достигается тем, что коэффициент пропорциональности между скоростями подачи забойной машины и привода конвейера задают величиной загрузки конвейера по высоте и корректируют его в зависимости от направления движения забойной машины, а скорость подачи забойной машины дополнительно ограничивают по скорости привода конвейера. На чертеже представлена принципиальная схема устройства. Выход схемы 1 сравнения подключен к регулятору 2 скорости конвейера, управляемому вариатором 3 скорости конвейера, в качестве которого может быть использовано либо устройство управления насосом при применении гидропривода, либо преобразователь частоты при применении частотно-регулиtpiyeMoro привода;. Вариатор 3 упр.авляет скоростью привода 4 .конвейера, которая контролируется датчиком 5 скорости конвейера. Выход датчика 5 подкл10чен на один из входов схемы 1 . срайнёния.
Нагрузка- привода 4 контролируется датчиком б момента нагрузки привода конвейера. Выход датчика б через схему 7 ограничения подключен на вход схемы 1 сравнения .
Выход схемы 8 сравнения подключен к регулятору 9 скорости подачи эа бойной машины, которыйУправйяёт регулируемым приводом 10 подаЧИзабойной машины, скорость которой контролиЕ уется датчиком 22 скорости , а направление - датчиком 12 направления движения забойной майшны. Выход датчика 11 скорости подачи подключен как к схеме 8 сравнения, так и к входу регулируемого усилителя 13,в&ход котьрогб ;ггоД1 :Л8УЧгей к:
третьему входу схемы 1 сравнения.
Коэффициент усиления регулируемого уси лйтеля 13 опреде11яетЬя волйчйной задания 14 и положением ключа 15, которого соединен с выходомдатчика 12 направления.
Привод 10 подачи забойной мамины епрёделя(е± Иагрузку ее привода 16 ре зания (привода исполнительного органа) , которая контролируется датчиком. 17 нагрузки. Выход датчика 17 .
ч-ерез схему 18 ограничения и cym aтор 19 подключен к схеме .8 сравнения, кпослед ней ч:ерез су мматор 19 iQ6rpafiii: &ii H подключен вйход дат чика 5, пе)ичем к сумматору 19 через схему 21 огранйч;ейия;подключей. . выход датчика б. Кроме того, выход последнего через ключ 22, управляе лый сигналом датчика 11 скорости подачи забойнсзй машины, соединен со вторым в-хбдбмрегулятора 2 скорости подачи привода конвейера. На третий вход схемы 8 сравнения «одается установка 23 скорости подачи.
СпосЪб. осуществляется следующим образом; ... .
sa taHHaa производительность забой. ной машины обеспечиваетсярегулиро:. Ш;йфм ркОросТй ее подачи путем срав;. ..нения заданной скорости {устан6вк а
23) с действительной скоростью по , контролируемо; датчиком 11, и воздействием разностного cWr riajia с выхода схемы 8 сравнения через регулятор 3 на привод 10 подачи. При перегрузке привода 16 резания забойной
машины сигнал с ., через схекгуIS вгрМЙчёШяГШе упает на схему 8 с райнгения, уменьшая ве личину установки 23. При этом уменьшается скорость подачи забойной ма luilHHV а следовательно и нат рузка ее Тфивода резаййя. Схема 18 ограничения служит для форми;рОвания , протгорцйонального перегрузке П5рйвода резания. При нагрузке последнего, не превышающей заданного предельного значения, сигнал на выходе схемы ограничения отсутствует.
При движении забойной машины сигнал датчика 11 скорости ее подачи через регулируемый усилитель 13 сравнивается С си.гналом датчика 5 скорости привода конвейера.
Выходной сигнал схемы 1 сравнения через регулятор 2 и вариатор 3 воздействует на привод 4 конвейера. Благодаря этому скорость конвейера подДеЕэживается пропорциональной скорости подачи забойной машины. Коэффициент пропорциональности определяется коэффициентом усиления регулируемого усилителя 13, который, задает ся величиной задания 14 загрузки конвейера по высоте. Для того , что.бы величина загрузки нб изменялась при .изменении Направления движения забойной машины, контролируют направление движения датчиком 12 направления, сигнал с которого управляет ключом 15. При изменений направления движения КЛЮЧ 15 clrTnefiqato . изменяет коэффициент УсиЛёния регулируемо.го усилителя 13. :
Таким 06pai3OM, за счет переключе|нйя к6эффйцйей а Уейлёнйя усилителя 13 достигаёТСЯ постоянная высота загрузки конвейера при движении забойн дй MaiiiifffiKa : fiO направлению транс- : Х-«--. .-,-.,ЙЙ -&,Ъ- rtX ci3rtl iariTI(b«MIn ТРПЯНГ - п(артировкй Угя:я, так и в противоположном. , .
При перегрузке привода 4 конвейера по сигналу датчика б срабатывает схема 7 ограничения, сигнал которой суммируется с сигналом усилителя 13, что увеличивает значение установки на схеме 1 сравнения. При этом скорость прййода конвейера увеличивается и уменьшаё сй его нагрузка. / ЕСЛИ увеличению скорое-, ти конвейера йсчерпан , а перегрузка его привода Продолжается и превышает предельноеэначениё,то по сигналу датчика б срабатывает схема 21 ограничения, сигнал с которой, поступая на схему 8 сравненйй, уменьшает устаQ нОвку скорости подачи забойной машины. CkelsocTfe последней снижается
прОпорцйбнально перегрузке конвейера, умень й(аетсй солйчествО поступающего на конвейер полезного ископаемого, а слёдбватёлъно уменьшается и нагрузка привода.
При больших скоростях привода 4
,, конвейера йрбШхоДит нарушение транспортирующей способности скребков, что приводит к йё эёсыпанйю угля за
борт конвейера, но при этом перегрузки привода 4 конвейера может и не
происходить. Дли п:е ёДОтвра1цения этого по сигналу датчика 5 скорости конвейера срабатывает 20 ограничения, сигнал с которой, поступая на
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления забойной машиной и конвейером | 2022 |
|
RU2814926C1 |
| Способ автоматического управления забойной машиной и конвейером | 1971 |
|
SU583304A1 |
| Устройство автоматического регули-РОВАНия СКОРОСТи пОдАчи углЕдОбыВАю-щЕй МАшиНы | 1979 |
|
SU817252A2 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| Устройство управления горной машиной | 1987 |
|
SU1476125A1 |
| Устройство для управления приводом конвейерной установки | 1984 |
|
SU1191391A1 |
| Система автоматического регулирования процесса непрерывной сушки в многозонной конвективной сушилке | 1982 |
|
SU1816947A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
