(54) УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДИСТАНЦИОННЫХ ДИСКРЕТНЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации дистанционных дискретных перемещений | 1980 |
|
SU905647A2 |
| Устройство для регистрации дистанционных дискретных перемещений | 1981 |
|
SU994916A2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДИСТАНЦИОННЫХ ДИСКРЕТНЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU377623A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| Устройство для автоматического измерения производительности топливовпрыскивающего насоса дизеля | 1983 |
|
SU1133432A1 |
| Контрольно-калибровочное устройство для нейтронных датчиков-зондов | 1987 |
|
SU1438457A1 |
| Универсальный картографический аппарат | 1960 |
|
SU147203A1 |
| Устройство для измерения ближнего поля антенны | 1984 |
|
SU1164632A1 |
| Устройство позиционирования магнитных головок | 1985 |
|
SU1345252A1 |
| Устройство регистрации структурных неоднородностей твердых веществ | 1972 |
|
SU474724A1 |
1
Изобретение относится к приборостроению и может быть использовано для дистанционного управления измерительной аппаратурой, например при газодинамических испытаниях аэродинами 1еских моделей.
По основному авт. св. № 377623 известно устройство, содержащее механизмы линейного и углового перемещений аэродинамического зонда с реверсивными электродвигателями, фотодатчики с дисками и регистрирующие блоки, при этом механизмы лин йного и углового перемещений кинематически соединены с дисками фотодатчиков, выходы которых подключены ч ко входам счетчиков регистрирующих блоков, соединенных через логические схемы с реверсивньми электродвигателямЦу схему управления и задающее устройство, которое совместно с логической схемой обеспечивает остановку зонда в любой точке измеряемого диапазона 1,
Недостаток указанного устройства независимая работа схемы управления синхронным реверсом электродвигателя и счетчика, что вызывает сбои при измерениях и приводит к неточно
сти регистрации линейного перемещения.
Цель изобретения - повышение точ- ности регистрации.
Эта цель достигается тем, что в , устройство вводится блок исходного состояния, соединенный со входом схемы управления и выходом логической схемы блока регистрации линейного перемещения.
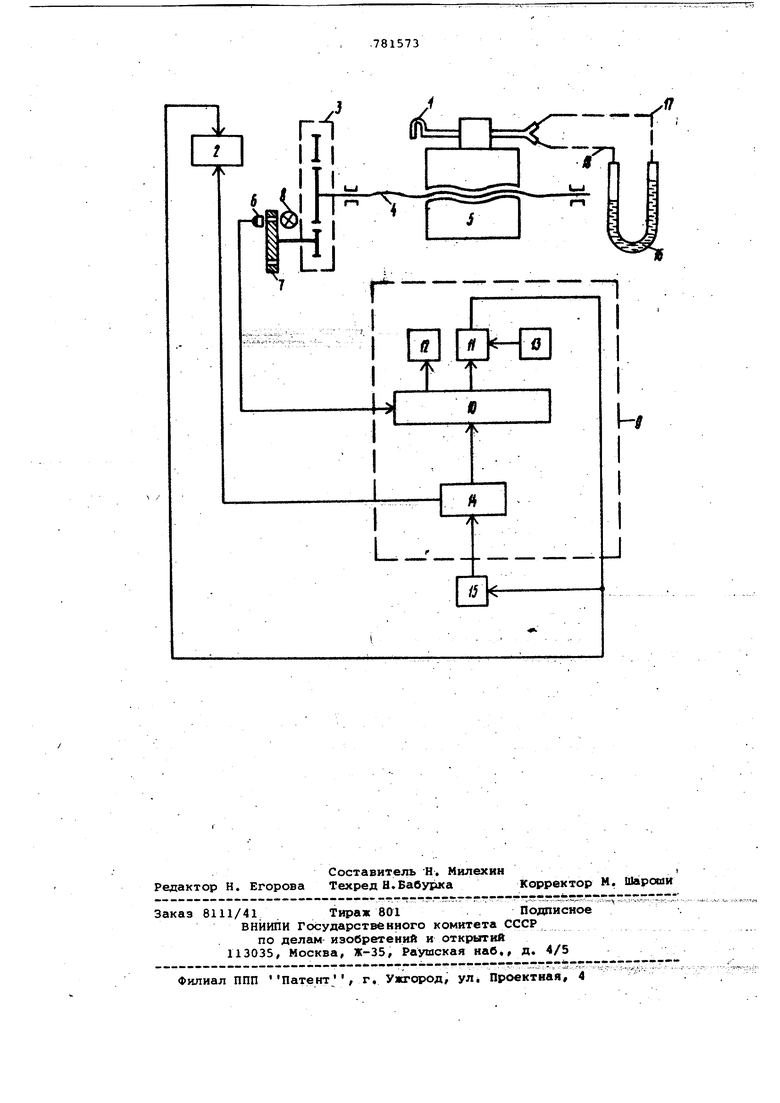
На чертеже изображена блок-схема предлагаемого устройства.
Устройство включает измерительный аэродинамический зонд 1, реверсивный электродвигатель 2, механизм линейного перемещения, состоящий из редуктора 3, ходового винта 4 и подвижной каретки 5, фотодатчика 6 с диском 7 и лампочкой 8 и регистри20рующий блок 9, состоящий из реверсивного счетЧика 10 импульсов, логической схемы .1, блока визуального отсчета (печати) и (или) бу25ферного блока 12 для ввода данных в ЭВМ, задающего (программного) устройства 13, схемы 14.управления синхронным реверсом электродвигатели и счетчиком импульсов и блок 15 ис30ходного состояния.
Аэродинамический измерительный зона 1 имеет связь с V-образным, манметром 16 с помощью пневмоприводов 17 и 18 и механическую связь с подВииной кареткой 5. С р)едуктором. 3 связан диск 7 с отверстием, перед которым расположен фотодатчик 6, освецаемый через отверстие диска лампочкой 8. Вход.блока 15 исходного состояния связан с выходом логической схемы 11, а выход - со входом cxeNOii 14 управления синхронного реверсивного двигателя и счетчика.
Устройство работает следующим образом.. „
Йа задающем (прог|эаевинс 1) устройстве 13выбирают рабочую точку по линейной координате. Схемой 14 управления синхронно эапус кается реверсивный двигатель 2 и реверсивный счётчик 10. Двигатель начинает вращаться, и счётчик работает на сложение импульсов. Одновременно начинает вращаться фотодйск 7 и перемещаться каретка 5, Световой поток от лампочки 8 через отве хзтия в диске попадает на фотодатчик б, вырабатывающий импульсы, которые подсчитываются счетчиком 10, выход которого связан с блоком визуального отсчета печати или (и) буфернь1М блоком 12 для ввода данных в ЭВМ. Кроме, того, калщый разряд счетчика 10 связан также с логической схемой 11, которая cpajjfiHBaeT текущие показания счётчика с программным значением, установленным На задающем устройстве 13, При сов781573
пгшении результата отработки с заданный значением логическая схема 11 вырабатьтает импульс, который поступает для остановки двигателя 2 и на блок 15 исходного состояния, связанный с входом схемы 14 управления. Выходным сигнс1лом-с блока 15 исходного состояния схема 14 управления возвращается в исходное (нулевое) состояние.. Этим она подготовлена к приему нсвых команд на пе1 емещение зонда в любом направлении.
Предлагаемое изобретение исключает независимую работу схемы управления, устраняет при зтом сбои и 5 погрешности при измерении и тем самым обеспечивает повышение точности регистрации линейного перемещения.
Формула изобретения
Устройство для регистрации дистанци.Онных дискретных перемещений по авт. ев. N 377623, от л и ч а ю,щ е е с я тем, что, с целью повЕлиения точности регистрации, в него введен блок исходного состояния, соединенный со входом схемы управления и выходом логической рхёмы 30 блока регистрации линейного перемещения.
Источники информации, принятые во внимание при экспертизе
