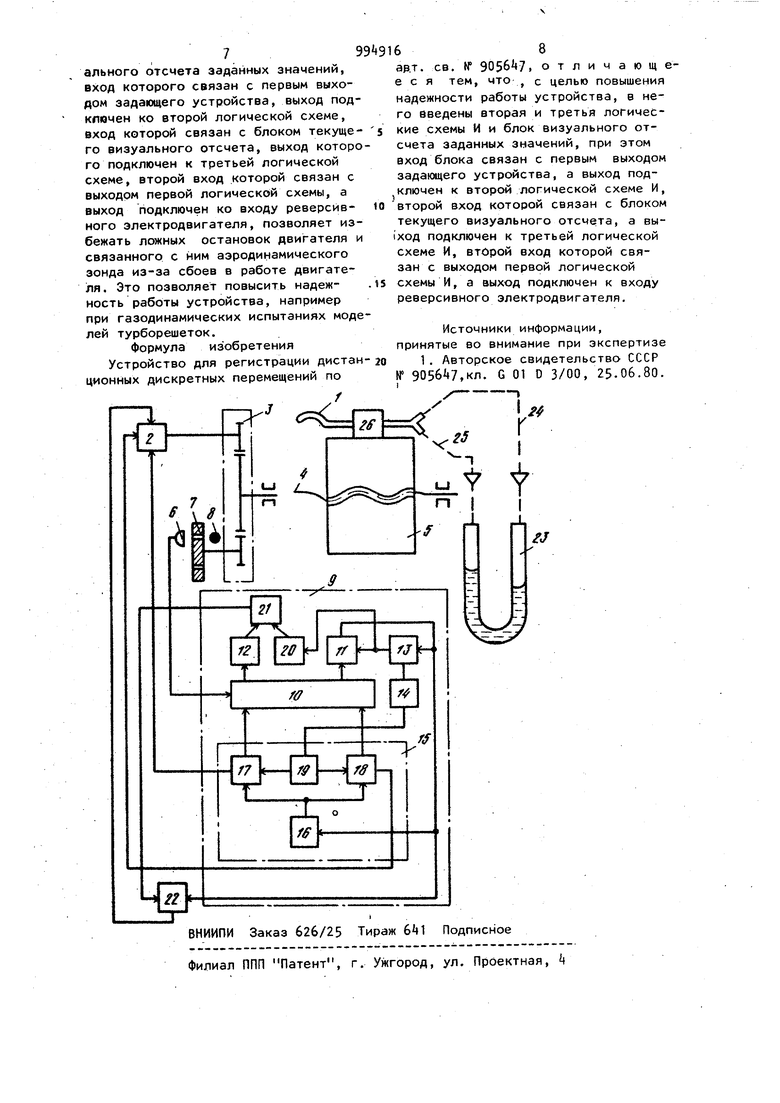
3Э ком текущего визуального отсчета, выход второй логической схемы И подключен к первому входу третьей логической схемы И, на второй вход которой поступает сигнал с выхода первой логической схемы И, при этом выход третьей логической схемы подключен ко входу реверсивного электродвигателя. На чертеже изображена блок-схема устройства. Устройство состоит из измерительного аэродинамического зонда 1, реверсивного электродвигателя 2, механизма линейного перемещения ,. соетоящего из редуктора 3, ходового винта k и подвижной каретки 5, фотоп датчика 6 с диском 7 и лампочкой 6, регистрирующего блока 9 с реверсивным счетчиком 10 импульсов, первой логической схемы 11, блока текущего визуального отсчета (печати или/и) буферным блоком для ввода данных в ЭВМ/12,задающего (программного) устройства 13, реле времени 1, схе мой управления синхронным реверсом электродвигателя и счетчиком импуль сов 15, содержащей блок исходного состояния 16, блоки 17 и 18 направления перемещения и устройство 19 пуска. В состав регистрирующего 6ло ка 9 входят также блок 20 визуально го отсчета заданных значений, вторая 21 и третья 22 логические схемь И. Аэродинамический измерительный зонд 1 связан с U-образной манометр ческой трубкой 23 с помощью пневмо проводов 2 и 25 и кинематически связан с..механизмом угловой установ ки зонда 26, расположенным на подвижной каретке 5. С редуктором 3 связан диск 7 с отверстиями, которым расположен фотодатчик 6, освещаемый через отверстия диска лампочкой 8. Ходовой винт 4 кинематически свя зан с диском 7 фотодатчика 6, соединенного с одним из входов счетчика 10 импульсов, два других входа к торого соединены с.выходами блоков 17 и 18 направления перемещения схе мы 15 управления. Первый вход счетчика 10 импульсо соединен с блоком 12 текущего визуального отсчета, а второй -выход -с первым входом первой логической схемы И 11, второй вход которой сое динен с первым выходом задающего программного устройства 13 а выход - со вторым входом третьей логической схемы И 22, со входом задающего программного устройства 13 и со входом блока 16 исходного состояния, выход которого соединен с бло-.ками 17 и 18 направления перемещения, вторые входы которых соединены с устройством 19 пуска. Второй выход задающего программного устройства 13 через реле времени соединен со входом устройства 19 пуска, а к первому выходу подключен вход блока 20 визуального отсчета заданных значений. Входы второй логической схемы И 21 связаны с выходом блока 12 текущего визуального отсчета и блока 20 визуального отсчета заданных значений, а выход - с первым входом третьей логической схемы И 22, выход которой соединен с реверсивным электродвигателем 2. Вторые выходы блоков 17 и 18 направления перемещения соединены с реверсивным электродвигателем 2. Устройство работает следующим образом. В программное устройство 13 заносят (например, записывают любым известным способом) в заданном порядке совокупность координат точек, в которых производится измерение. Сюда же-заносится код признака направления перемещения (например, в виде отличной друг от друга комбинации двоичных цифр - в простейшем случае это могут быть коды 1, О), поскольку заданная последовательность измерений может предусматривать обратное перемещение по отношению к точке текущего измерения. С первого входа задающего (программного) устройства 13 код устанавливаемой координаты заносится в первую логическую схему 11 и одновременно в блок 20 визуального отсчета заданных значений . Через реле Н времени и устройство 19 пуска схемы 15 управления кодом признака направления перемещения, поступающим со второго выхода задающего устройства 13, блок 17 или 18 направления перемещения устанавливается в рабочее состояние,например, в рабочее состояние установлен блок 17 направления перемещения. Производится начальный синхронный запуск реверсивного двигателя 2 и реверсивного
счетчика 10,например, двигатель начинает вращаться в правую сторону, а счетчик работает на сложение импульсов. Одновременно начинает вращаться фотодиск 7 и перемещаться каретка 5- Световой поток от лам; почки 9 через отверстия в диске попадает на фотодатчик 6, вырабатывающий импульсы, которые подсчитываются счетчиком 10.
Выход счетчика связан с блоком 12 текущего визуального отсчета 12. Кроме того, каждый разряд счетчика связан также с первой логической схемой И 11, которая сравнивает текущие показания счетчика с программным значением, занесенным на задаюп щее устройство 13.
При совпадении результата обработки с установленным значением первая логическая схема 11 вырабатывает импульс, который поступает на второй вход третьей логической схемы 22, на блок 16 исходного состояния и на зада.юшее устройство 13Сигналы с блока 20 визуального отсчета заданных значений и блока 12 текущего визуального отсчета поступают на вход второй логической схемы 21. При совпадении результата отработки с .ным зйачением вторая логическая схема 21 вырабатывает импульс, который поступает на первый вход третьей логической схемы 22. Если в устройствах регистрирующего блока 9 нет сбоев, то на входы третьей логической схемы 22 одновременно поступают импульсы от второй 21 и первой 11 логических схем. При этом схемой 22 вырабатывается импульс для остановки реверсивного электродвигателя 2..
Сигналом, поступившим с первой логической схемы 11 на задающее устройство 13, в последнее автоматически заносится новое программное значение и код признака направления перемещения, который через реле 14 времени и устройство 19 пуска поступает на блок 17 или 18 направления перемещения. Реле времени задерживает на определенный период, требуемый для выполнения необходимых измерений с помощью зонда, сигналы автоматического запуска устройства и код признака направления перемещения. После отработки .реле времени временного интервала на блок 17 или 18 направления пере
мещения поступает код признака,например, код признака поступит на блок 18 направления перемещенияу который устанавливается тем самь)м в рабочее положение. Одновременно на устройство 19 пуска поступает сигнал автоматического запуска устройства. Тем самым обеспечивается запуск двигателя 2 и счеТчика 10 в обратных направлениях и двигатель будет вращаться в левую сторону, а счетчик работать на вычитание импульсов. Аналогичным, образом, при совпадении текущего кода счетчика импульсов с программным кодом задающего устройства и показаний блока текущего визуального отсчета со значением кода на блоке визуального отсчета заданных значений первая логическая схема 11 и вторая логическая схема 21 вырабатывает импульсы, которые через третий логический блок 22 останавливают двигатель , а от первой логической схемы 11 через блок 16 исходного состояния возвращается в нулевое состояние схемы блок 18 направления перемещения. При этом на задающее устройст во автоматически заносится следующее программное значение.
Работа в автоматическом режиме продолжается до тех пор,-пока не будет отработано последнее программное значение, занесенное в задающее устройство- С помощью механизма 26 угловой установки и U-образного манометра 23 выполняется необходимая в процессе измерений ориентация зонда 1 по потоку.
Если в процессе работы в одном из устройств блока 9 регистрации возникет сбой, например произойдет сбой в первой логической схеме 11,то импульсы от первой и второй логических схе придут на схему 22 BI разное время ил схема 11 вообще не выдаст импульс управления, поскольку сбой нарушит взаимодействие кодов, поступающих на схему 11 со счетчика 10 и программного устройства 13. Отсюда логическая схема 22, выдающая импульс управления на двигатель 2 только в том случае, если на нее поступают одновремено два импульса со схем 21 и 11, не сработает и двигатель 2 необходимо остановить вручную по показаниям блоков визуального отсчета 12 и 20,
Таким образом, введение второй и третьей логических схем и блока визуального отсчета заданных значений, вход которого связан с первым выходом задающего устройства, выход подкличен ко второй логической схеме, вход которой связан с блоком текущего визуального отсчета, выход которо го подключен к третьей логической схеме, второй вход которой связан с выходом первой логической схемы, а выход подключен ко входу реверсивного электродвигателя, позволяет избежать ложных остановок двигателя и связанного с йим аэродинамического зонда из-за сбоев в работе двигателя. Это позволяет повысить надежность работы устройства, например при газодинамических испытаниях моде лей турборешеток. Формула изобретения Устройство для регистрации дистан ционных дискретных перемещений по 9 б аэ.т. ев, № . отличающееся тем, что , с целью повышения надежности работы устройства, в него введены вторая и третья погические схемы И и блок визуального отсчета заданных значений, при этом вход блока связан с первым выходом задающего устройства, а выход подключен к второй логической схеме И, второй вход которой связан с блоком текущего визуального отсчета, а выход подключен к третьей логической схеме И, второй вход которой связан с выходом первой логической схемы И, а выход подключен к входу реверсивного электродвигателя. Источники информации, принятые во внимание при экспертизе 1 . Авторское свидетельство СССР № 905б 7,кл. G 01 О 3/00, 25.06.80.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации дистанционных дискретных перемещений | 1980 |
|
SU905647A2 |
| Устройство для регистрации дистанционных дискретных перемещений | 1979 |
|
SU781573A2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДИСТАНЦИОННЫХ ДИСКРЕТНЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU377623A1 |
| Устройство для управления кипным питателем с верхним отбором волокна | 1988 |
|
SU1553574A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для управления намоточным станком | 1989 |
|
SU1817061A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1056246A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| Устройство для считывания графической информации | 1974 |
|
SU670943A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1037313A1 |
