54 Предлагаемый блок управления пред назначен для управления конвейерами в частности для управления конвейерами, применяемыми в угольной и горн рудной промышленности для транспорти ровки полезных ископаемых. В основном авт.св. №363961 описан блок управления, содержащий узлы при ема и выдачи пусковой и разрешающей команд управления, узлы включения пр вода и контроля работы конвейера и две схемы И, причем один из входов первой схемы И подключен к выходу узла приема пусковой команды управления, другой - к выходу узла контро ля конвейера, а выход первой схемы И подсоединен ко входу узла выдачи пусковой команды управления, узлу включения привода, а также к одному из входов второй схемы И, второй вход которой связан с выходом узла приема разрещающей команды управления, а выход второй схемл И подключен ко входу узла выдачи разрешающей команды управления, а также тре тью схему И, один вход которой подсоединен к инверсному выходу узла контроля работы конвейера, другой в которой подключен к выходу узла при ма разрешающей команды управления,
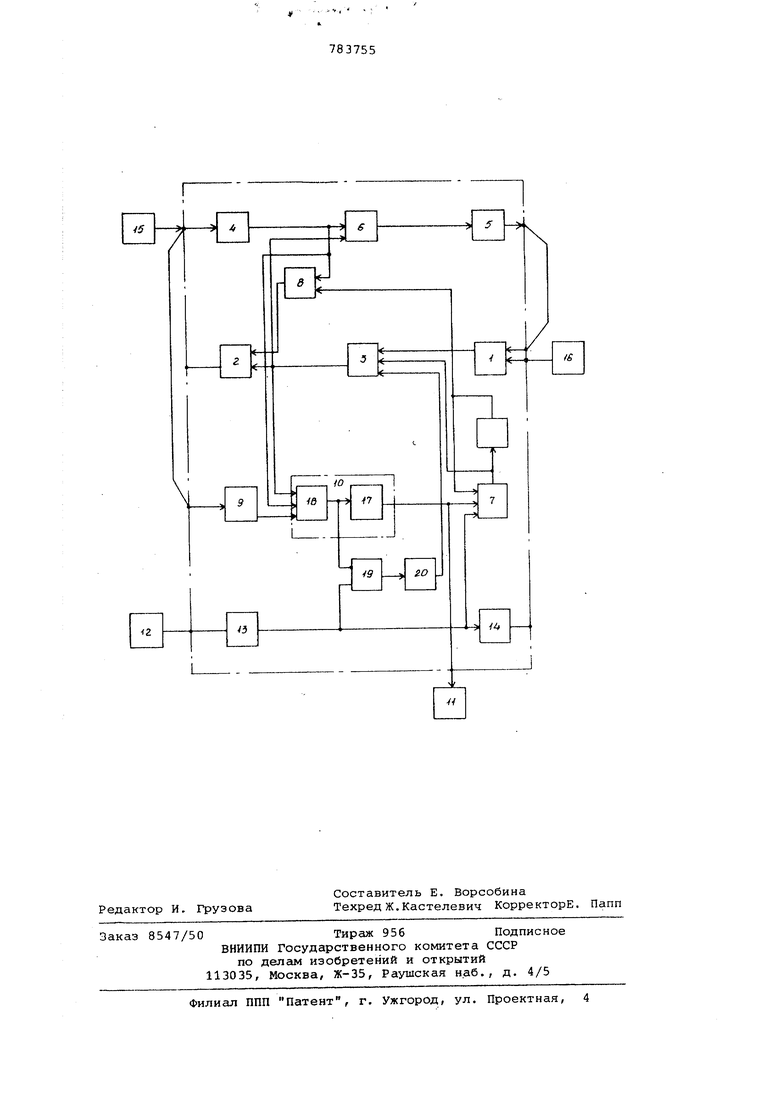
БЛОК УПРАВЛЕНИЯ а выход схемы И соединен со входом узла выдачи пусковой команды управления 13. При такой схеме блока управления после прихода пусковой, разрешающей и блокировочной команд управления блок включения привода подает команду на включение контактора. Контактор включает двигатель конвейера, а на вход реле скорости поступает сигНсш с датчика скорости. Реле скорости следит за скоростью тягового органа конвейера и, если происходит нарушение режима работы тягового органа, подает сигнал на узел контроля работы конвейера, который аварийно останавливает конвейер. В пpимeняe ыx сейчас реле скорости выходными элементами являются реле или транзисторы, а выходной сигнал и состояние выходного элемента при достижении лентой конвейера скорости заданной величины изменяются релейно. При нормальной работе реле скорости выходные элементы, следовательно, могут находиться в двух состояниях: реле притянуто или отпущено, транзистор открыт или закрыт. При выходе из строя реле скорости состояние его iвыходных элементов оказывается аналогичным их состоянию при нулевой или заданной скорости конвейера при нормальной работе реле скорости. В Первом случае опасной ситуации при управлении конвейером не произойдет, так как после запуска конвейера сигнал с реле скорости о наборе его яговым органом заданной скорости не придет и блок управления аварийно Остановит конвейер. Во втором случае с выхода неисправного реле скорости постоянно будет идти сигнал. аналогичный сигналу о достижении тяговым органом конвейера заданной ско рости, т.е. фактически контроля скорости конвейера производиться не будет, что может привести к аварий.Это является недостатком блока управления . Цель изобретения - устранение ука занного недостатка, т.е. повышение надежности работы блока управления. Поставленная цель достигается тем, что в блок управления по авт.ев №363961 введены последовательно соединенные элемент ЗАПРЕТ и элемент НЕ а узел включения привода выполнен в виде последовательно соединенных четвертой схемы И и реле времени, пр чем входы четвертой схемы И являются входами, узла включения привода, выход реле времени служит входом этог узла, выход четвертой cxeivtj И подклю чен к первому входу элемента ЗАПРЕТ, второй вход которого соединен с выходом реле скорости, а выход элемента НЕ подключен к одному из входов первой схемы И. При таком выполнении блока управления сигнал о достижении лентой кон вейера заданной скорости, приходящей с реле скорости при отсутствии сигнала с блока включения привода на включе ше конвейера, воспринимается как сигйал, которого при нормальной работе блока управления не должно быть, т.е. как ложный сигнал. На чертеже представлена схема пре лагаемого блока ущгавления. Блок управления состоит из узлов 1 и 2 приема и выдачи пусковой коман ды соответственно, между которыми включена схема И 3, узлов 4 и 5 приема и выдачи разрешающей команды, со ответственно между которыми включена схема И 6, узла 7 контроля работы ко вейера, в{лход которого связан с вход И 3. Выход узла 4 и иверсный в ход узла 7 включены на входы cxeivM И 8, йыход которой соединен с входом узла 2. Выхода узла 4, схемы И 3 и узла 9 приема команды Блокировка связаны с входами блока 10 включения привода, ,выход,которого подключен н входы .узла 7 и устройства 11 включе ния контактора. Датчик 12 скорости соединен на вход реле 13 скорости, ход которого связан с входами узла и узла 14 выдачи команды Блокировк Входы узлов 4 и 9 связаны с датчиком 15 наличия емкости, а выход узла 5 соединен с входами узла 1, на вход которого подключена кнопка 16 Пуск. Блок 10 включения привода состоит из реле 17 времени и схемы И 18.Входы схемы И 18 являются входаг блока 10, а выход реле 17 времени выходом блока 10. Выход схемы И 18 соединен со входом реле 17 времени и инверсным входом элемента ЗАПРЕТ 19. Прямой вход этого элемента соединен с выходом реле 13 скорости. Выход элемента 19 соединен со входом элемента НЕ 20, а выход элемента НЕ соединен с третьим входом схемы И 3. При наличии емкости в месте разгрузки конвейера контакты датчика 15 заилкаются, с выхода узлов 4 и 5 поступают сигналы на один из входов схемы И 6 и блока 10, подготавливая цепь для включения привода конвейера. При нажатии кнопки 16 Пуск сигнал с выхода узла 1 поступает на вход схемы И 3. На второй вход этой схемы подается сигнал с узла 7 контроля работы конвейера. Этот сигнал присутствует на выходе узла 7, а исчезает с выдержкой времени только в том случае, когда сигнал с выхода блока 10 имеется, а с выхода реле 13 скорости нет. При отсутствии сигналов с выхода схемы И 18 и реле 13 скорости сигнал на выходе элемента ЗАПРЕТ 29 также отсутствует. Поэтому на выходе элемента НЕ 20 имеется сигнал, который заполняет третий вход схемы И 3. С выхода схемы И 3 сигнал поступает на второй вход схемы И 6, на третий вход схемы И 18 и на вход узла 2. При заполнении входов схемы И 6 сигнал с ее выхода поступает на узел Бис его выхода на вход узла 1, фиксируя пусковую команду при отпускании кнопки Пуск. Входы схемы И 18 также заполнены, и с ее выхода сигнал проходит на вход реле 17 времени и на инверсный вход элемента ЗАПРЕТ 19. При этом сигнал на ее выходе не появляется, а на выходе элемента НЕ 20 сигнал не исчезает. Через время, необходимое для предпусковой сигнализации, на выходе реле 17 времени появляется сигнал, который воздействует на вход устройства 11. В результате этого привод конвейера включается и по достижении лентой заданной Йкорости срабатывает реле 13.скорости. Сигнал с его выхода поступает на один из входов узла 7, предотвращая исчезновение сигнала с выхода узла 7, и на прямой вход элемента ЗАПРЕТ 19. На выходе элемента ЗАПРЕТ сигнал не появляется, так как на его инверсном входе существует сигнал с выхода схемы И 18. Если из-за пробуксовки ленты конвейера скорость ее снижается, то сигнал с выхода реле скорости исчезает. что приводит к исчезновению сигнала с выхода узла 7. При зтом узел 7 чер свой инверсный выход блокируется, а сигнал с одного из входов схемы И 3 снимается. В результате исчезают сиг налы с выхода схемы И 6 и блока 10, Конвейер останавливается, а кнопка 1 деблокируется. Повторный запуск конвейера можно осуществить только после ручной деблокировки узла.7. В случае выхода из строя реле 13 скорости таким образом, что на его выходе имеется сигнал при отсутствии сигнала с датчика 12 скорости, этот сигнал поступает на прямой вход элемента ЗАПРЕТ 19. Перед запуском конвейера, когда со схемы И 18 еще не прступает сигнал на инверсный вход элемента ЗАПРЕТ, на ее выходе появля ется сигнал, который поступает на вход элемента НЕ 20. С выхода этой схемы сигнал исчезает и третий вход схемы И 3 не будет заполненным. Поэтому на один из входов схемы 18 при попытке запуска конвейера сигнал не поступает и конвейер запускаться не будет.. При отключении конвейера по коман де оператора и исправном реле скорос ти ситуация, аналогична описанной, при запуске с неисправным реле скорости будет повторяться каждый раз, так как сигнал с реле скорости исчезает с выдержкой времени, а на вклю чение контактора - без выдержки. Однако это обстоятельство не сказывает на нормальной работе блока управлени и конвейера. При этом необходимо лиш чтобы сигнал о неисправности реле ск рости не блокировался, как это осуществлено, например , в узле 7, где требуется его ручная деблокировка, что в предложенной схеме блока управления выдерживается. Таким образом, введение в блок управления дополнительных элементов ЗАПРЕТ и НЕ позволяет обнаружить ложный сигнал с реле скорости и предотвратить запуск конвейера исходя из того, что отсутствие сигнала на включение контактора перед запуском и наличие сигнала с реле скорости говорит о неисправности реле скорости. Это повышает безопасность управления конвейером. Формула изобретения Блок управления по авт.св.№363961, отличающийся тем, что, с целью повышения надежности работы блока, в него введены последовательно соединенные ЗАПРЕТ и элемент НЕ, а узел включения привода.выполнен в виде последовательно соединенных четвертой схемы И и реле времени, причем входы четвертой схемы И являются входами узла включения привода, выход реле времени является выходом этого узла, выход четвертой схемы И подключен к первому входу элемента ЗАПРЕТ, второй вход которого соединен с выходом реле скорости, выход элемента НЕ подключен к одному из входов первой схемы И. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №363961, кл. q 05 В 21/02, 1971 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок управления | 1979 |
|
SU785846A2 |
| Блок управления электроприводом конвейера | 1980 |
|
SU899424A1 |
| БЛОК УПРАВЛЕНИЯ | 1973 |
|
SU363961A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ | 1966 |
|
SU186003A1 |
| Устройство для автоматического включения резервного источника питания | 1981 |
|
SU1032526A1 |
| Устройство для проверки исправности аппаратуры дискретной автоматики | 1987 |
|
SU1656606A2 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| Устройство для запуска конвейера | 1990 |
|
SU1708716A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
10
id
}
