(54) ПИТАТЕЛЬ-ДОЗАТОР СТЕБЕЛЬЧАТЫХ КОРМОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Питатель-дозатор стебельчатых кормов | 1976 |
|
SU609520A1 |
| ПИТАТЕЛЬ-ДОЗАТОР | 2003 |
|
RU2264707C2 |
| Способ питания передвижной молотилки и питатель | 1983 |
|
SU1204148A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1985 |
|
SU1304790A1 |
| Дозатор кормов | 1984 |
|
SU1166761A1 |
| ЗЕРНОКОРМОУБОРОЧНЫЙ КОМБАЙН | 1993 |
|
RU2075918C1 |
| Питатель-дозатор кормов | 1987 |
|
SU1426516A1 |
| Дозатор кормов | 1982 |
|
SU1036309A1 |
| Питатель-дозатор стебельчатых кормов | 1985 |
|
SU1289432A1 |
| Подборщик-дозатор | 1981 |
|
SU1007598A1 |
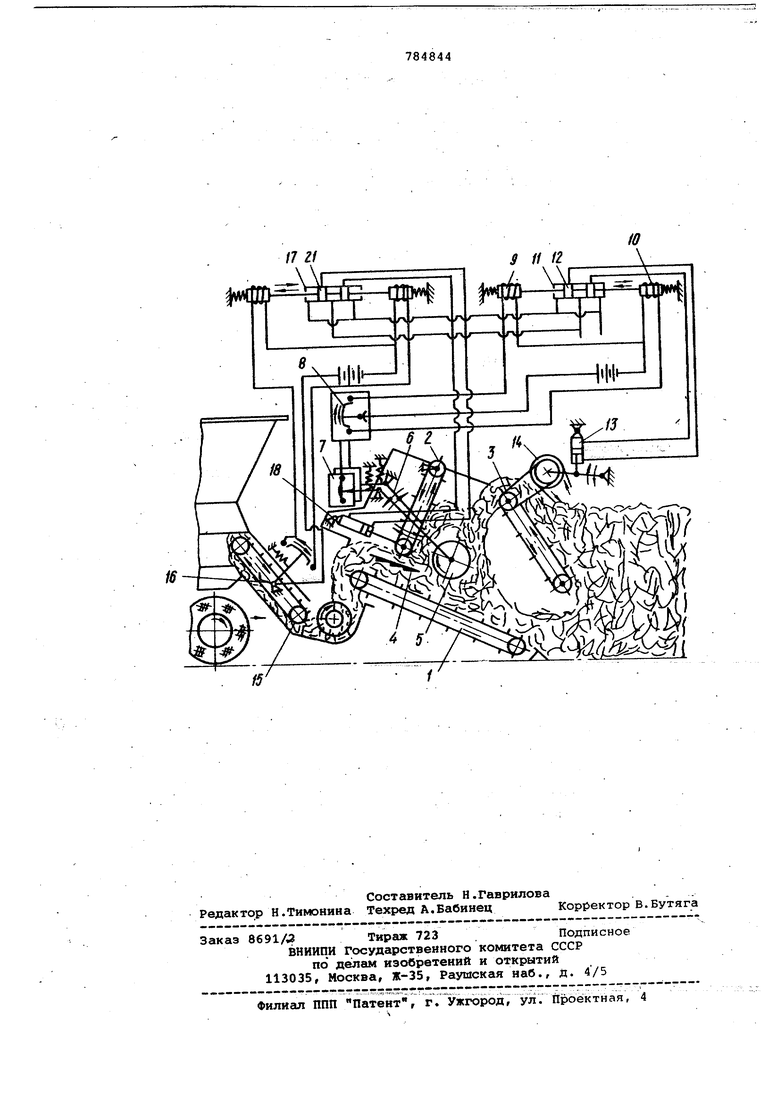
Изобретение относится к области механизации животноводства и может быть использовано для выдачи стебельчатых кормов из копен и скирд в перерабатывающую машину. В основном авт.св. 609520 описан питатель-дозатор стебельчатых кормов, использующийся преимущественно для дозированной выдачи стебель чатых кормов из копен и скирд в перерабатывающую машину. Этот питательдозатор имеет раму, подающий транспортер и закрепленный над ним встречно вращающийся штифтовой транспортер с пальцевой решеткой, перед которыми установлен заборный транспортер. Меж ду подающим, штифтовым и заборным транспортерами шарнирно закреплен ло пастной барабан, который является датчиком, вырабатывающим сигналы и пйсылающим их в систему автоматического регулирования. Система автомати ческого регулирования управляет процессом подачи кормов, обеспечивая их дозирование l . Однако известный питатель-дозатор недостаточно равномерно подает корма в перерабатывающую машину. Целью дополнительного изобретения является повышение равномерности выдачи кормов из копен и скирд в перерабатывающую машину-. Цель достигается тем, что штифтовый транспортер установлен с возможностью качания относительно его верхней оси, а заборный транспортер снабжен вариатором скорости. На чертеже изображена схема питателя-дозатора . Питатель-дозатор состоит из подающего 1, штифтового 2, заборного 3 транспортеров, пальцевой решетки 4. Лопастной барабан 5 снабжен двумя двуплечими рычагами 6, связанными с потенциоме рами 7 интегратора 8 с контактами, который соединен с электромагнитами 9, 10, управлякнцими гидрораспределителем 11 с золотником 12, связанным с гидроцилиндром 13 вариатора 14 скорости заборного транспортера 3. На наклонном транспортере 15 перерабатывающей машины установлен датчик 16, соединенный с гидрораспределителем 17, который связан с гидроцилиндрами 18, взаимодействующими с нижней осью штифтового транспортера 2. При включении питателя-дозатора и перерабатывающей машины в емкости питателя-дозатора в первоначальный
момент стебельчатый корм отсутствует. При этомлопастной барабан 5 находится в крайнем нижнем положении, а контакты потенциометров 7 находятся в верхнем положении. Интегратор 8, суммируя показания потенциометров 7, перекидывают свой контакт в верхнее положение, что приводит к срабатыванию электромагнита 9. При этом золотник 12 перемещается влево и открывает доступ масла из напорной магистрали в нижнюю полость гидроцилиндра 13. В результате поршень гидроцилин,дра 13 воздействует на вариатор 14, и скорость заборного транспортера 3 увеличивается до максимума.
В начальный момент под наклонным трансп6ртё|рЬм 15 стебельчатый корм отсутствует и датчик 16 йайЗДится в крайнем нижнем положении, при этом гидрораспределитель 17 обеспечивает доступ масла из напорной магистрали в нижние полости гидроцилиндров 18, что приводит к перемещению нижней оси штифтового транспортера 2 по дуге вокруг, верхней оси на максим льное расстояние. Таким образом, выходной зазор между штифтовым 2 и подающим 1 транспортерами окажется максимальным.
Стебельчатый корм, забираемый с копны или скирды подающим 1 и заборным 3 транспортерами начинает интенсийно заполнять емкость питателя-дозатора, и затем проходит под наклонным транспортером 15 и попадает в перерабатывающую машину . При этом система находится в нейтральном положении.
С увеличением количества стебельчатого корма в емкости питатгеля-доз атора До максимально допустимого лопастной барабан 5 переместит контакты потенциометров 7 в нижнее положение, а интегратор 8, суммируя их, перекидывает свой контакт также в нижнее положение, тем самым включая электромагнит 10, который переместит золотник 12 вправо. В результате масло с напорной магистрали попадает в - верхнюю полость гидроцилиндра 13. Вариатор 14 уменьшает до минимума скорость заборного транспортера 3.
Наибольший слой стебельчатого корма, поступая под наклонный транспорП ® датчик 16, в зультате чего поршни гидроцилиндров 18 перемещают нижнюю ось штифтового транспортера 2 вокруг верхней оси в другую сторону, в результате выходной зазор между штифтовым 2 и подающим 1 5 транспортерами окажется минимальным. При уменьшении или увеличении стебельчатого корма в емкости питателядозатора или под наклонным транспортером 15 циклы повторяются.
0 Предлагаемый питатель-дозатор повышает равномерность выдачи стебельчатых кормов и дает возможность осуществить автоматическое регулирование технологическим процессом.
, Формула изобретения
Источники информации, принятые во внимание при экспертизе
1- Авторское свидетельство СССР 609520, кл. А 01 К 5/00, 1976 (прототип),
/7 Zi
MW
10
a // i
