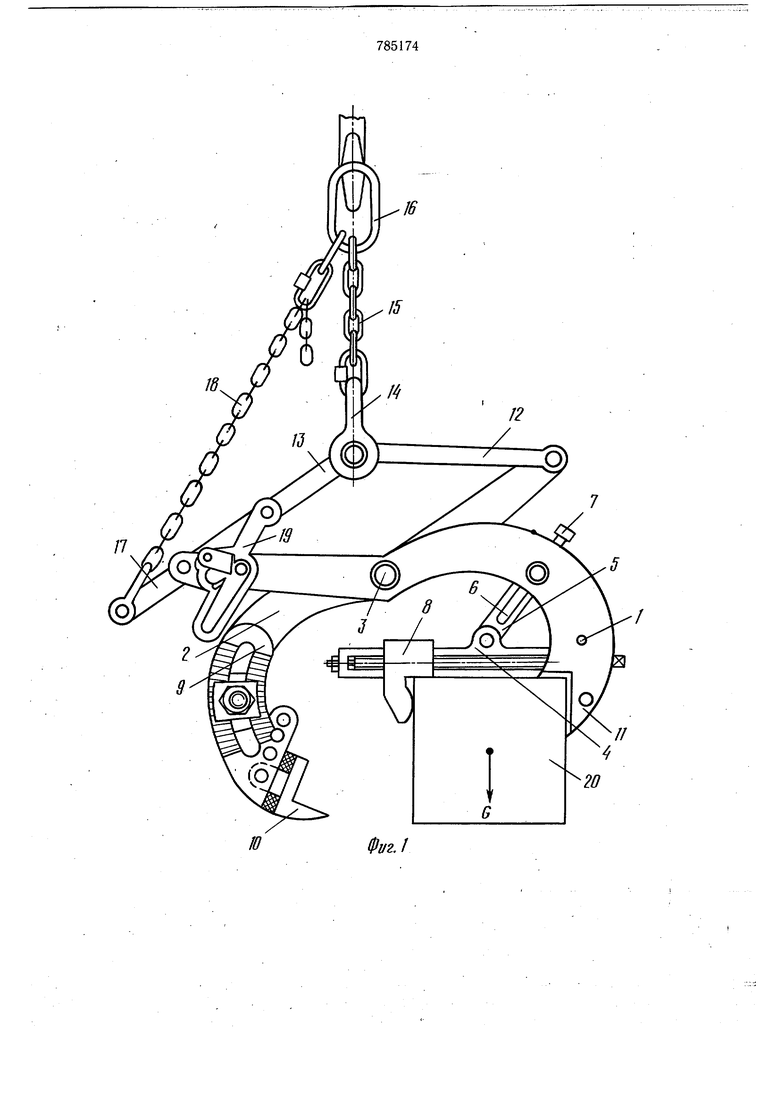
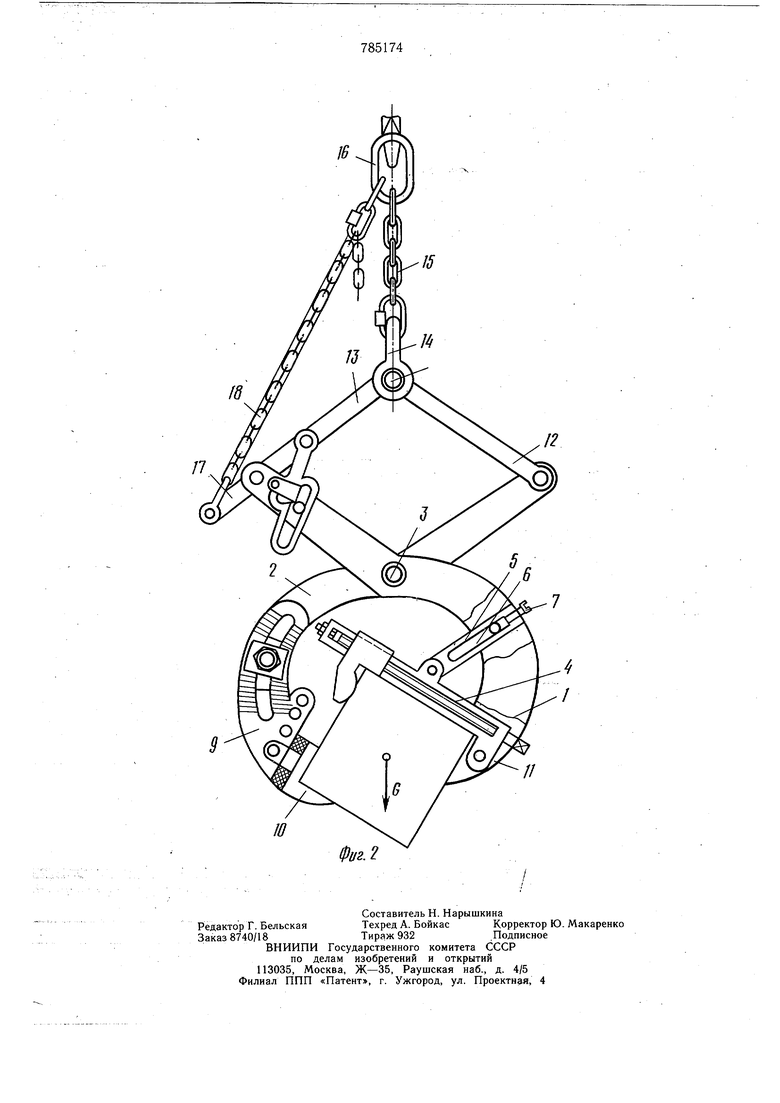
Изобретение относится к подъемно-транспортному оборудованию, а именно к клещевым захватам для штучных грузов. Известен клещевой захват для штучных грузов, содержаш,ий связанные общей осью клещевины, одни концы которых снабжены зажимными губками, а другие посредством тяг связаны с кольцом для навешивания на крюк грузоподъемного механизма, и фиксатор нерабочего положения клещевин 1. Недостатком известного клещевого захвата является невозможность транспортирования чистообработанных изделий без повреждения их поверхности. Целью изобретения является расширение технологических возможностей за счет обеспечения транспортирования чистообработанных изделий без повреждения их поверхностей. Цель достигается тем, что захват снабжен прижимным механизмом, включающим в себя направляющую винтовую штангу, шарнирно закрепленную на одной из клещевин и дополнительно связанную с ней шарнирной планкой, и подвижный прижим, установленный на винтовой штанге, при этом другая клешевина выполнена из двух частей, неподвижной и подвижной, на которой с возможностью перестановки шарнирно закреплена зажимная губка, а одна из тяг выполнена в виде двуплечего рычага, свободное плечо которого связано с кольцом гибким элементом. На фиг. 1 показан клещевой захват для штучных грузов в момент установки на груз; На фиг. 2 - то же, в момент подъема груза. Клещевой захват содержит две клещевины 1 и 2, связанные общей осью 3. На клещевине 1 шарнирно закреплена направляющая винтовая штанга 4, дополнительно связанная с клещевиной 1 шарнирной планкой 5 с прорезью 6 и регулировочным винтом 7. На штанге 4 установлен подвижный прижим 8, при этом клещевина 2 выполнена, из двух частей - неподвижной и подвижной части 9. На части 9 с возможностью перестановки шарнирно закреплена зажимная губка 10 с вырезом. Клещевина 1 оканчивается зажимной губкой 11, также имеющей вырез. Клещевины 1 и 2 связаны тягами 12 И 13 со скобой 14, которая гибким элементом 15 с кольцом 16 навешивается на. крюк грузоподъемного механизма. Тяга 13 выполнена в виде двуплечего рычага, свободное плечо 17 которого связано с кольцом 16 гибким элементом 18. На тяге 13 закреплен фиксатор 19 нерабочего положения клещевин 1 и 2. Захват работает следующим образом. Клещевины 1 и 2, связанные осью 3, устанавливают посредством фиксатора 19 в нерабочее (раскрытое) положение и навешивают посредством скобы 14, гибкого элемента 15 и кольца 16 на крюк грузоподъемного механизма. Прижим 8 устанавливают на штанге 4 на размер груза 20, винтом 7 задают угловой ход планки 5 с прорезью 6, которая ограничивает перемещение штанги 4. Клещевину 2 также настраивают на размер груза 20 за счет перемещения подвижной части 9 и перестановки губки 10 по части 9. После этого, отрегулировав длину гибкого элемента 18, закрепленного на плече 17 тяги 13 и обеспечивающего выход губки 10 из-под ребра освобождаемого груза.20, опускают захват на груз 20 таким образом, чтобы боковые грани груза 20 расположились между прижимом 8 и губкой 11 клещевины 1. Затем осуществляют подъем захвата, при этом груз 20 за счет штанги 4 с прижимом 8, связанной планкой 5 с клещевиной 1, поворачивается на одно из ребер, а губка 10 клещевины 2 подходит под соседнее ребро, и таким образом груз надежно захватывается губками 10 и 11 за противоположные ребра. Для освобождения груза 20 захват опускают до тех пор, пока груз 20 не коснется НИЖНИМ ребром опоры, губка 10 выйдет из под ребра, а клещевины 1 и 2 зафиксируются фиксатором 19 в нерабочем (раскрытом) положении. После этого подъемом крюка грузоподъемного механизма вверх захват свободно снимают с груза 20. Формула изобретения Клещевой захват для штучных грузов, содержащий связанные общей осью клещевины, одни концы которых снабжены зажимными губками, а другие посредством тяг связаны с кольцом для навешивания на крюк грузоподъемного механизма, и фиксатор нерабочего положения клещевин, отличающийся тем, что, с целью расширения технологических возможностей за счвт обеспечения трайспортировани5Г чистообработанных изделий без повреждения их поверхности, захват снабжен прижимным механизмом включающим в себя напраЬляющую винтовую штангу, шарнирно закрепленную на одной из клещевин и дополнительно связанную с ней щарнирной планкой, и подвижный прижим, установленный на винтовой штанге, при этом другая клещевина выполнена из двух частей, неподвижной и подвижной, на которой с возможностью перестановки щарнирно закреплена зажимная губка, а одна из тяг выполнена в виде двуплечего рычага, свободное плечо которого связано с кольцом гибким элементом. Источники информации, принятые во внимание при экспертизе 1. Рякин А. И. Урванцев Б. А. Строповка грузов. М., «Машиностроение, 1968, с. 52, рис. 24 ж (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1982 |
|
SU1079596A1 |
| Клещевой захват | 1979 |
|
SU787338A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
| Захватное устройство для штучных грузов | 1980 |
|
SU912621A1 |
| Захват-кантователь | 1982 |
|
SU1052468A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |