(54) АВТОМАТИЧЕСКИЙ КЛЕЩЕВОЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ
I
Изобретение относится к подъемно-транспортному оборудованию, в частности к клещевым захватам для штучных грузов.
Иасвестен автоматический клещевой захват для штучных грузов, содержащий клещевины, одни концы которых соединены посредством тяг с осью серьги, навешиваемой на крюк грузоподъемной машины, и механизм фиксации клещевин в раскрытом положении, включающий в себя вертикальную стойку с продольным фигурным пазом и храповое колесо, закрепленное на оси серьги, взаимодействующее с подпружиненной собачкой I .
Однако известное устройство недостаточно надежно в эксплуатации, так как не обеспечивает фиксацию оси серьги во всех ее положениях. .
Цель изобретения - повышение надежности.
Поставленная цель достигается тем, что механизм фиксации снабжен ползуном, установленным на стойке и прикрепленным к серьге, на котором щарнирно закреплена упомянутая подпружиненная собачка, дополнительной собачкой, щарнирно закрепленной на серьге и также взаимодействующей с храповым колесом, и противовесом, закрепленным на серьге, при этом ось серьги расположена в фигурном, пазу стойки и выполнена с двумя параллельными плосf кими поверхностями.
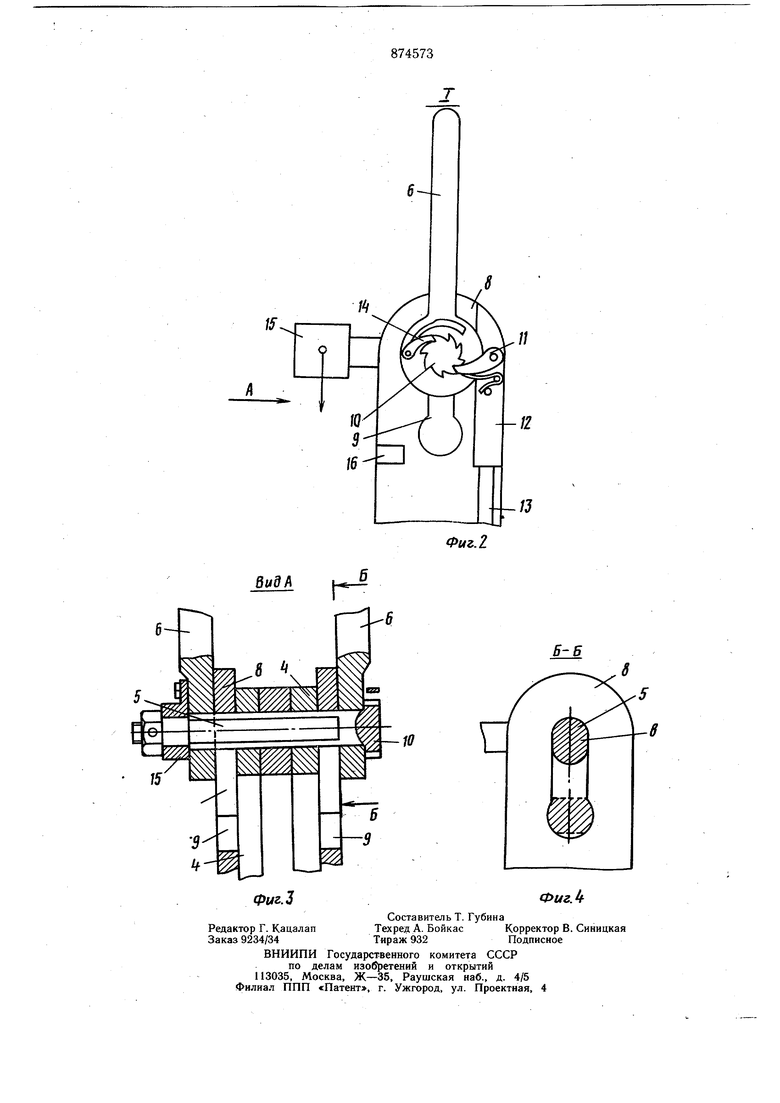
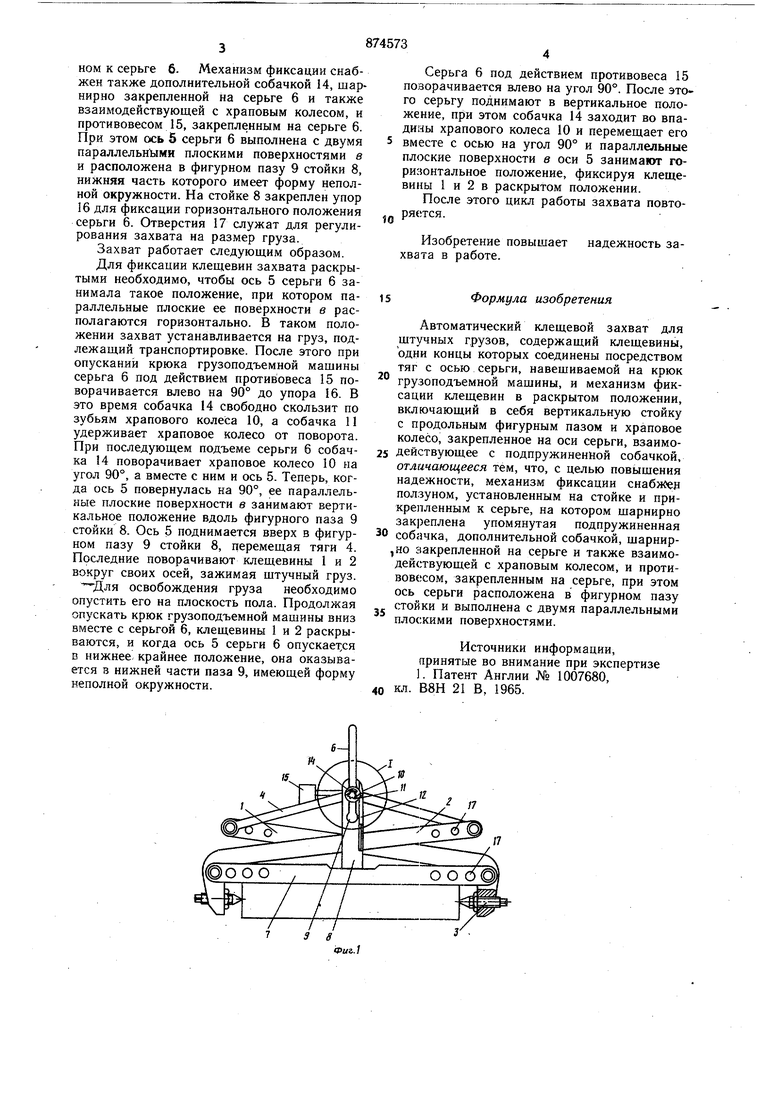
На фиг. 1 изображен захват, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - сечение Б-Б
, на фиг. 3.
Захват содержит клещевины 1 и 2 с ко10 лящими губками 3, одни концы которых соединены посредством тяг 4 с осью 5 серьги 6, навешиваемой на крюк грузоподъемной машины. Другие концы клещевин 1 шарнирно установлены на траверсе 7. Захват снабжен механизмом фиксации клещевин в расS крытом положении, включающим в себе вертикальную стойку 8 с продольным фигурным пазом 9, состоящую из двух щек, и храповое колесо 10, закрепленное на оси 5 серьги 6. взаимодействующее с подпружиненной собачкой 11. Подпружиненная собачка 11 щарнирно закреплена на ползуне 12, установленном на стойке 8 в направляющих 13 и прикрепленном к серьге б. Механизм фиксации снабжен также дополнительной собачкой 14, шарнирно закрепленной на серьге 6 и также взаимодействующей с храповым колесом, и противовесом 15, закрепленным на серьге 6. При этом ось 5 серьги б выполнена с двумя параллельными плоскими поверхностями в и расположена в фигурном пазу 9 стойки 8, нижняя часть которого имеет форму неполной окружности. На стойке 8 закреплен упор 16 для фиксации горизонтального положения серьги 6. Отверстия 17 служат для регулирования захвата на размер груза.
Захват работает следующим образом.
Для фиксации клещевин захвата раскрытыми необходимо, чтобы ось 5 серьги 6 занимала такое положение, при котором параллельные плоские ее поверхности в располагаются горизонтально. В таком положении захват устанавливается на груз, подлежащий транспортировке. После этого при опусканий крюка грузоподъемной машины серьга 6 под действием противовеса 15 поворачивается влево на 90° до упора 16. В это время собачка 14 свободно скользит по зубьям храпового колеса 10, а собачка 11 удерживает храповое колесо от поворота. При последующем подъеме серьги 6 собачка 14 поворачивает храповое колесо 10 на угол 90°, а вместе с ним и ось 5. Теперь, когда ось 5 повернулась на 90°, ее параллельные плоские поверхности в занимают вертикальное положение вдоль фигурного паза 9 стойки 8. Ось 5 поднимается вверх в фигурном пазу 9 стойки 8, перемещая тяги 4. Последние поворачивают клещевины 1 и 2 вокруг своих осей, зажимая щтучный груз. освобождения груза необходимо опустить его на плоскость пола. Продолжая опускать крюк грузоподъемной машины вниз вместе с серьгой б, клещевины 1 и 2 раскрываются, и когда ось 5 серьги б опускаемся в нижнее крайнее положение, она оказывается в нижней части паза 9, имеющей форму неполной окружности.
№,
Серьга 6 под действием противовеса 15 поворачивается влево на угол 90°. После этого серьгу поднимают в вертикальное положение, при этом собачка 14 заходит во впадины храпового колеса 10 и перемещает его вместе с осью на угол 90° и параллельные плоские поверхности в оси 5 занимают горизонтальное положение, фиксируя клещевины 1 и 2 в раскрытом положении.
После этого цикл работы захвата повторяется.
Изобретение повышает
надежность захвата в работе.
Формула изобретения
Автоматический клещевой захват для щтучных грузов, содержащий клещевины, одни концы которых соединены посредством тяг с осью серьги, навешиваемой на крюк
грузоподъемной машины, и механизм фиксации клещевин в раскрытом положении, включающий в себя вертикальную стойку с продольным фигурным пазом и храповое колесо, закрепленное на оси серьги, взаимодействующее с подпружиненной собачкой, отличающееся тем, что, с целью повышения надежности, механизм фиксации ползуном, установленным на стойке и прикрепленным к серьге, на котором шарнирно закреплена упомянутая подпружиненная
собачка, дополнительной собачкой, щарнир,но закрепленной на серьге и также взаимодействующей с храповым колесом, и противовесом, закрепленным на серьге, при этом ось серьги расположена в фигурном пазу стойки и выполнена с двумя параллельными плоскими поверхностями.
Источники информации, принятые во внимание при экспертизе 1. Патент Англии № 1007680, кл. В8Н 21 В, 1965.
2 /7
/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Клещевой захват | 1982 |
|
SU1054272A1 |
| Грузозахватное устройство | 1985 |
|
SU1553505A1 |
| Автоматический захват инженера И.В.Илыка | 1979 |
|
SU908733A1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |