1
Изобретение относится к горному делу и может быть использовано для съемки вертикальных и наклонных скважин.
Известен инклинометр для съемки вертикальных скважин, в котором используется гиростабилизатор индикаторного типа, относительно которого производятся измерения азимута скважин, а зенитный угол оси скважины измеряется с помрщью уровня.Измерения азимута и зенитного угла оси скважины производятся дистанционно фотоэлектрическим способом .
Недостатком этого инклинометра является то, что им не измеряют зенитные углы меньше семи угловых минут. Это вносит большую погрешность при съемке вертикальных скважин. Кроме того, уход гиростабилизатора полностью входит в ошибку измерения азимута оси скважины, что также вносит погрешность в съемку.
Известен инклинометр, содержащий гироскоп направления; датчик зенитного, угла, устройство измерения азимута, датчик угла рассогласования между устройством измерения азимута и гироскопом направления.
исполнительный двигатель следящей системы 2.
Азимут оси скважины -измеряют потенциометром, корпус которого приводится в плоскость горизонта следящей системой и неизменно ориентируется относительно плоскости наибольшего наклона скважины, а движок, через карданный шарнир, с помощью следящей системы копирует положение главной оси гироскопа. Зенитный угол измеряется в плоскости наибольшего 10 наклона другим потенциометром, корпус ко торого связан с корпусом датчика азимута.
Недостатком этого инклинометра является то, что величина ухода гироскопа от заданного направления под воздействием внутренних и внешних сил полностью входит
1S в погрешность измерения азимута оси скважины.
Целью данного изобретения является повышение точности определения азимута скважины.
Указанная цель достигается тем, что
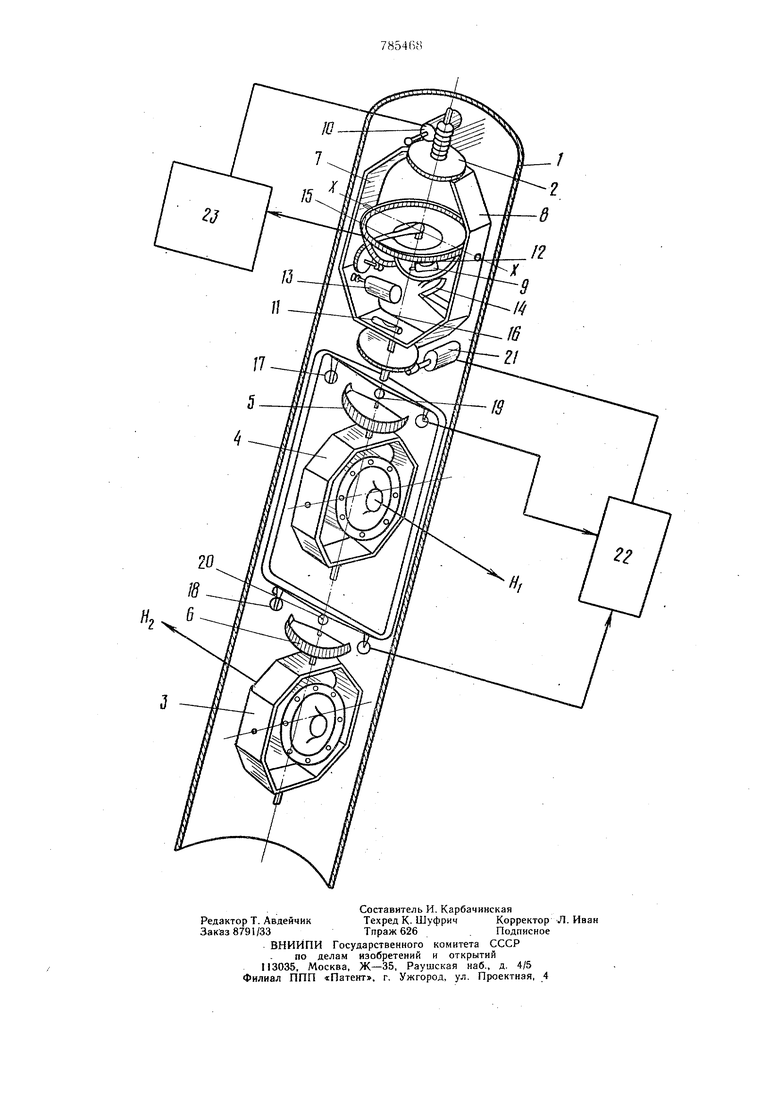
20 инклинометр снабжен дополнительным гироскопом, счетно-решающим узлом, введенным в следящую систему, и коммутирующим блоком, при этом основной гироскоп установлен в положении противоположном вектору кинематического момента дополнительного гироскопа, а выходы датчиком угла наклона и азимута через коммутирующий блок связаны с исполнительным двигателем следящей системы, причем датчик азимута соединен с счетно-решающим узлом. На чертеже изображена схема инклинометра.
В корпусе 1 прибора размещены коллектор 2; два гироскопа направления 3, 4; ;шторки 5, 6 следящей системы; рамка 7 с датчиком азимута 8 и датчиком угла наклона 9 скважины,- электромотор Ш, устанавливающий рамку в плоскости наклона сква жины, жидкостный переключатель - уро1Вень 11, корректирующий установку рамки; ;уровень 12 с электромотором 13, устанав;Ливающи м плоскость- датчика азимута . в горизонтальное положение; щетка 14; движок 15 датчика азимута; ось вращения 16 рамки; следящая система, включающая фотосопротивление 17, 18; лампы подсветки 19, 20; электромотор 21; коммутирующее устройство 22 и счетно-рещающее устройство 23.
Благодаря тому, что рамка 7 всегда устанавливается в плоскости наклона скважины, угол наклона регистрируется по положению щетки 14 с датчика угла наклона. Азимут скважины измеряется положением движка 15 на датчике азимута. Так как рамка находится в плоскости наклона скважины, ее ось X-X всегда горизонтальна. Уровень 12 с гйдромотором 13 устанавливают плоскость датчика азимута горизонтально. Следящая система, копируя положение шторок 5, 6, поворачивает ось вращения рамки, попеременно устанавливая движок датчика азимута относительно главной оси каждого из гироскопов. Команды на переключение следящей системы подаются автоматически при движении инклинометра по скважине. Съем показаний происходит в два такта. В первый такт измеряются азимутальный угол относительно гироскопа направления 3 и подается в счетно-решающее
устройство 23. Во второй гакт коммутирую щее устройство 22 отключает выход датчика 18 и подключает выход датчика 17. Тем самым следящая система устанавливает движок датчика азимута в том же направлении, какое занимает главная ось гироскопа 4. Измеряется азимутальный угол относительно гироскопа направления 4 и также подается а счетно-решающее устройство, на выходе которого получают азимут скважины какполусумму двух измерений.
Повышение точности определения азимута скважины позволит сократить расходы на бурение дополнительных замораживающих скважин при проходке стволов способом замораживания. Так при бурении 36 скважин для проходки ствола диаметром восемь метров из-за неточности определения координат забоя скважины дается перекрытие ледопородных цилиндров в 1м.
Формула изобретения
Гироскопический инклинометр, содержаилий гироскоп, датчик азимута, датчик угла наклона скважины, следящую систему с исполнительным двигателем, электромотор, отличающийся тем, что, с целью повышения точности определения азимута скважины, он снабжен дополнительным гироскопом, счетно-решающим узлом и введенным в следящуЕО систему коммутирующим блоком, при этом основной гирбскоп установлен в положении, противоположном вектору кинетического момента дополнительного гироскопа, а выходы датчиков угла наклона и азимута через коммутирующий блок связаны с исполнительным двигателем следящей системы, причем датчик азимута соединен с счетно-решающим узлом. Источники информации,
Принятые во внимание при экспертизе
1.Труды ВНИМИ. Сборник 87, 1972.
2.Авторское свидетельство СССР № 166289, кл. Е 21 В 47/022, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1990 |
|
SU1788224A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1964 |
|
SU166289A1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1977 |
|
SU705103A1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |