первый и второй блоки умножения, первые входы которых соединены с выходами соответственно первого косинусного и первого синусного функциональных блоков, первый и второй суммирующие блоки, два инвертора, подключенных выходами к первым входам соответствующих интеграторов, и масшта-, бирующие делители, содержит третий инвертор,, выход которого подключен к первому входу третьего интегратора блок вычитания, соответствующие входы которого соединены с выходами второго и третьего интеграторов, и источник эталонного напряжения,связанный с первым входом первого суммирующего блока через первый масштабирующий делитель. Вход первой прямоугольной координаты соединен с входом первого инвертора. Входы второй и третьей прямоугольных координат подключены к вторым входам соответственно второго и третьего интеграторов. Выход первого интегратора подключен к входам первого косинусного и первого синусного Функциональных блоков. Выход третьего интегратора подключен к входам второго косинусного и второго синусного функциональных блоков,а выход блока вычитаник - к входам третьего косинусного и третьего синусного функциональных блоков.Выходы второго и третьего синусных функциональных блоков через второй и третий масштабирующие делители связаны с соответствующими входами первого суммирующего блока, выход которого подключен к вторым входам первого и второго блоков умножения, выходы которых подключены соотве ственно к второму инвертору и второму входу первого интегратора.Выходы второго и третьего косинусных Функциональных блоков через четвертый и пятый масштабирующие делители связаны соответственно с первым и вторым входами второго сум дарующего блока, выход которого соединен с входом третьего инвертора,а выходы интеграторов являются выходами устройства. Интегратор выполнен на операционном усилителе, в цепи обратной связи которого включены параллельно соединенные элемент ограничения и интегрирующий конденсатор.
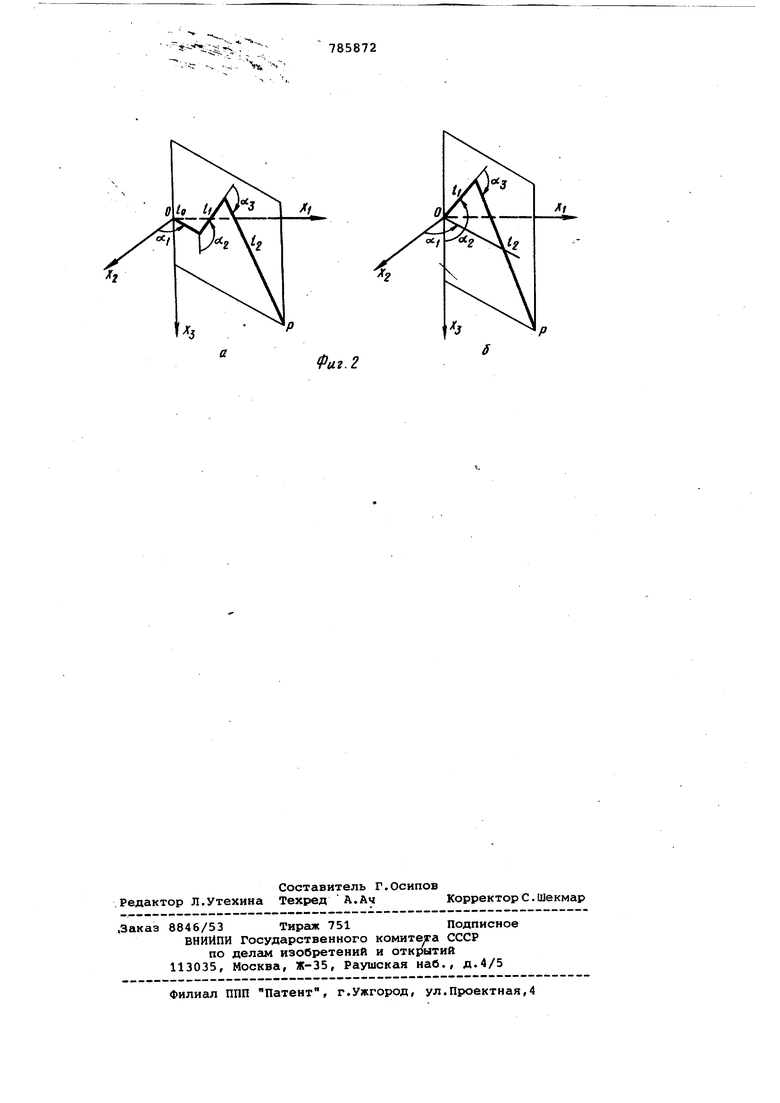
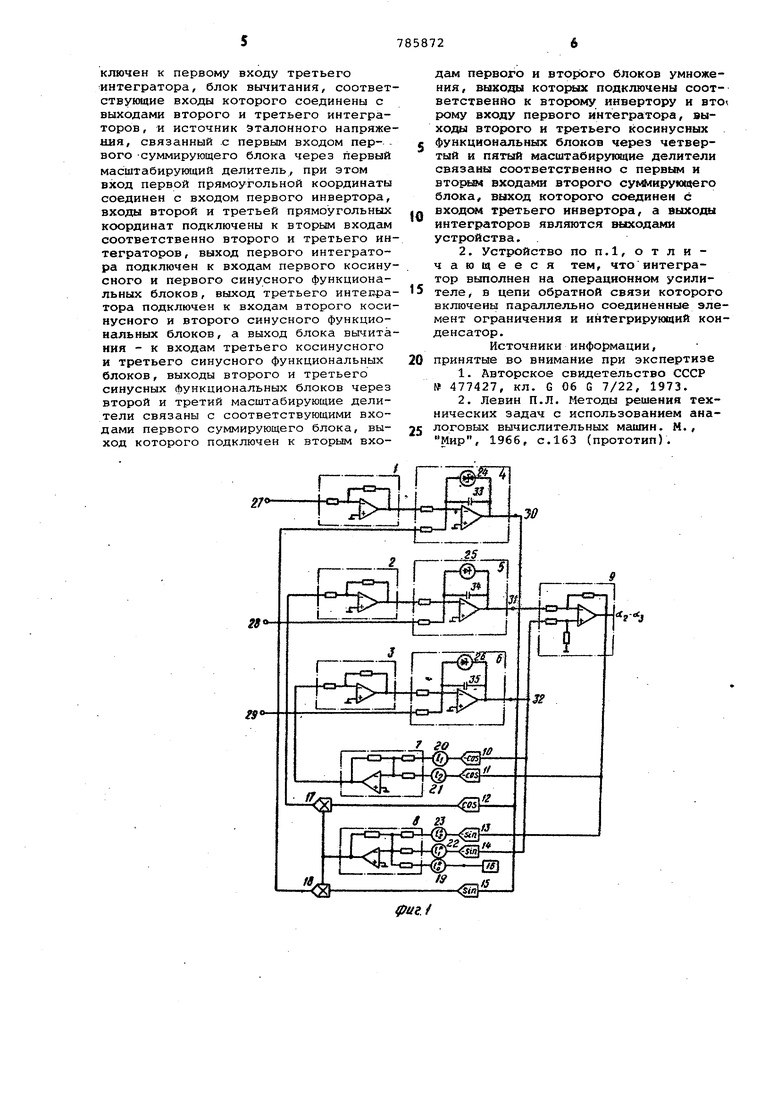
На фиг.1 дана структурная схема устройства; на Ъиг,2 - диаграммные работы преобразователя.
Устройство содержит инверторы 13, интеграторы 4-6, суммирующие блоки 7,8, вычитающий блок 9, косинусные функциональные блоки 10-12, синусные Функциональные блоки 13-15 источник 16 эталонного напряжения, блоки 17, 18 умножения, масштабирующие делители 19-23 и элементы 24-26 ограничения.
На чертежах обозначены входы 2729 устройства, выходы 30-32 и интегрирующие конденсаторы 33-35.
Устройство работает следующим образом.
На делителях 19,20 и 22,21 и 23 устанавливают в выбранном масштабе значение длин соответственно звеньев BO t я конечностк.
Программное движение искусственной-конечности (например, ноги шагаквдего аппарата) задается декартовыми координатами ее конца , поступающими на входы устройства.
Входные воздействия отрабатываются соответствукнцими контурами устройства. Напряжения на выходах интеграторов, представляющие искомые углы, изменяются до момента уравновешивания заданных прямоугольных координат текущими, вычисляемыми с помощью
тригонометрических блоков 10-15,
блока вычитания 9 и суммирующих блоков 7,8, которые реализуют в совокупности кинематическую схему конечности. Для получения однозначного решения исходных кинематических уравнений конечности в цепи обратной связи блоков 7 и В включены, как и в интеграторах, элементы ограничения (на чертеже не показаны.
Требуемое время переходного процесса зависит от скорости изменения входных величин и может варьироваться изменением коэффициентов усиления в интеграторах.
Технико-экономический эффект от использования изобретения определяется как сокращением объема оборудования системы управления механизмом, так и упрощением функций оператора, что повышает производительность труда.
Формула изобретения
1. Устройство для преобразования трехмерного вектора прямоугольных координат конца искусственной конечности в углы поворота ее звеньев, содержащее синусные и косинусные
функциональные блоки, первый и второй блоки умножения, первые входы которых соединены с выходами соответственно первого косинусного и первого синусного функциональных блоков, первый и второй суммирующие блоки, два инвертора, подключенных выходами к первым входам соответствующих интеграторов и масштабирующие делители, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения преобразования трехмерного вектора декартовых координат в трехмерный вектор угловых координат звеньев конечности, устройство дополнительно содержит .
третий инвертор, выход которого подключей к первому входу третьего интегратора, блок вычитания, соответствующие входы которого соединены с выходами второго и третьего интеграторов , и источник эталонного напряжения, связанный .с первым входом пер- . вого -суммирующего блока через первый масштабирующий делитель, при этом вход первой прямоугольной координаты соединен с входом первого инвертора, входы второй и третьей прямоугольных координат подключены к вторым входам соответственно второго и третьего интеграторов , выход первого интегратора подключен к входам первого косинусного и первого синусного функциональных блоков, выход третьего интевратора подключен к входам второго косинусного и второго синусного функциональных блоков, а выход блока вьгчитания - к входам третьего косинусного и третьего синусного функциональных блоков, выходы второго и третьего синусных функциональных блоков через второй и третий масштабирующие делители связаны с соответствующими входами первого суммирующего блока, выход которого подключен к вторым вхо27
дам первого и второго блоков умножения, выходы которых подключены соответственйо к второму инвертору и вто рому входу первого интегратора, выхода) второго и третьего косинусных g функциональных блоков через четвертый и пятый масштабирующие делители связаны соответственно с первым и вторым входами второго суммирующего блока, выход которого соединен с третьего инвертора, а выходы
Q интеграторов являются выходами устЕЮйства.
2. Устройство по п.1, отличающееся тем, чтоинтегратор выполнен на операционном усили5теле, в цепи обратной связи которого включены параллельно соединённые элемент ограничения и интегрирующий конденсатор.
Источники информации,
0 принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 477427, кл. G 06 G 7/22, 1973.
2.Левин П.Л. Методы решения технических задач с использованием аналоговых вычислительных машин. М.,
5
Мир, 1966, с.163 (прототип).
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| Устройство для преобразования трехмерного вектора прямоугольных координат конца искусственной конечности в углы поворота ее звеньев | 1982 |
|
SU1027739A1 |
| Устройство для преобразования координат объекта | 1980 |
|
SU951317A1 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НЛ ЭКРАН}- ЭЛЕКТРОННО.ПУЧЕВОЙ ТРУБКИ | 1972 |
|
SU425193A1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2254672C2 |
| Устройство для преобразования прямоугольных координат в полярные | 1989 |
|
SU1644176A1 |