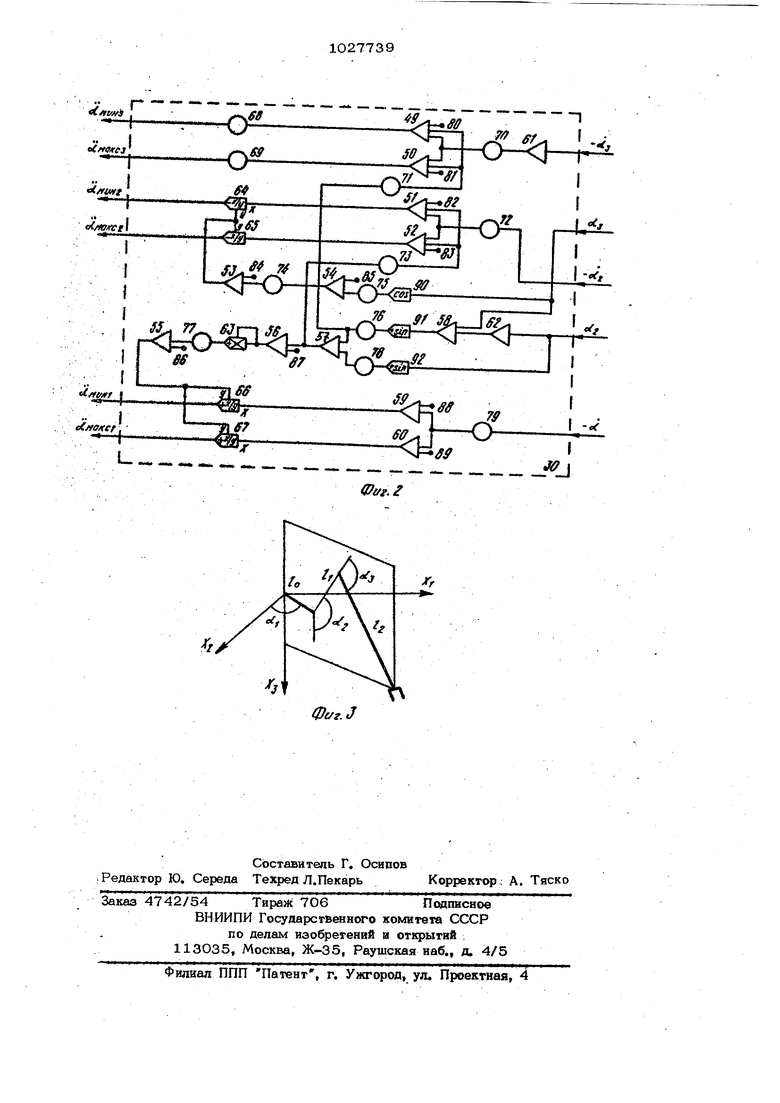
1 Изобретение относятся к аналоговой Вычислительной технике и может быть и пользовано Б системах управления искус ственными конечностями {ИК)1 роботовманипуляторов и шагающих машин. Известны устройства преобразования вектора координат конца ИК в соответст вующие значения углов поворота звеньев ИК, предн.азначенные для использования в системах управаения движением ИК. Устройство, содержащее аналоговые решающие элементы (интеграторы, сумматоры, тригонометрические блоки), решает задачу преобразования только двумерного вектора прямоугольных координат в двумерный вектор углов поворота плоского двузвенника. Для этого в устройстве решается система дифференциаль Hbjx уравнений, эквивалентная, требуемым преобразованиям С 3. Основным недостатком известного ус ройства при его использовании в контуре управления ИК является необходимость предварительного преобразования трехмер ного вектора прямоугольных координат конца ИК в цилиндрические координаты. Наибояее близким к предлагаемому яв ляется устройство содержащее три канала фор.четрования угла поворота, каждый из которых состоит из сумматора, первый вход которого соеда«ен с соответствующим входом устройства, и интегратора, вход которого подключен к выходу сумматора, а также общий для всех кана лов блок преобразования угловых координат в прямоугольные, вьшолненный в виде блока вы-гатания, входы которого подключены к выходам соответствующих интеграторов, а выход подключен к входам соответствующих синусных и косинусных функциональных блоков, подключенных вы ходами через соответствующие масштабные делители к входам соответствующих сумматоров, выход одного из которых соединен через множительные блоки с входами сумматоров каналов формирования угла поворота. Устройство решает задачу получения вектора значений углов поворота звеньей оС ct, о , ot ком поненты которого связаны с требуемыми значениями прямоугольных координат х( х)следу1С1цими соотношениями: 2 Х е COS (062-063) е Sin 06-2+e Sin(o62-o j), (Il 39 0 2 - длины звеньев ИК; Х- где12 суммарная проекция звеньев на плоскость ( i. Устройство вычисляет углы поворота звеньев методом неявной функции. Лля этого система (1) заменяется специ ш.ьно подобранной эквивалентной системой дифференциальных уравнений Г23. Недостаток данного устройства при его использовании в системе управления движением ИК заключается в том, что являясь чисто пересчетным, оно на выходе выдает только значения углов поворота oL соответствующие требуемому положению конца ИК Х а для системы управления движения ИК нужно иметь не только значения и закон перехода o6(t) от начальных значений ot соответствующих начальному положению конца ИКХ{о д/,йАПри этом важно, чтобы этот закон oi(t)yчитывал динамические характеристики приводов, отрабатывающих углы поворота звеньев в ИК, и самой ИК. Наличие такого закона c(-fc}B его производных d ii)K оЦ-Ь) позволяет эффективно использовать их в качестве программных в системе управления приводами ИК. Цель изобретения - расширение функциональных возможностей за счет одновременного определения законов изменения углов поворота и значений их производных с учетом динамических характеристик исполнительных механизмов. Поставленная цель достигается тем, что устройство для преобразования трехмерного вектора прямоугольных координат конца искусственной конечности в углы поворота ее звеньев, содержащее три канала формирования угла поворота, в каждом из которых первый вход первого сумматора соединен с входом соответствующей прямоугольной координаты устройства, .выход первого сумматора через первый интегратор связан с соответствующим входом общего для всех каналов блока преобразования угловых координат в прямоугольные, соответствующий выход которого соединен с вторым входом пер-г вого сумматора соответствукшего канала формирования угла поворота, содержит блок определения текущих граничных значений производных углов поворота и в каждом канапе фop v Ipoвaния угла поворота второй и третий сумматоры ,второй и третий интеграторы и управляемый сумматор с ограничением, причем в каждом канале выход первого интегратора соединен с первым входом второго сумматора, выход первого сумматора - с первым входом третьего сумматора, выходы второго и третьего сумматоров соединены с соответствующими информационными входами управляемого сумматора с ограничением, выход которого через поспедовательно соединенные второй и третий интеграторы связан с вторым входом второго сумматора, выход втсфого интегратора, соединенный с вторым входом третьего сумматора, выход третьего интегра тора и выход управляемого сумматора с ограничением являются соответственно первым, вторым и- третьим выходами канала формирования угла поворота, первый выход первого канала,, первые и вторые выходы второго, и третьего каналов подключены к соответствующим входам блока определения текущих граничных значений производных углов поворота, первый и Второй выходы которого соединены с соответствующими управляющими входами управляемого сумматора с ограничением первого канала, третий и четвертый выходы - с управляющими входами управляемого сумматора с ограничением второго канала,а пятый и шестой выходы - с управпякшими входакда управляемого сумма тора с ограничением третьего канала формирования угла поворота, входы начальных УСЛОВИЙ третьего и второго интеграторов каждого канала соединены с шинами задания начальных значений углов и их производных соответственно. Введение в каждый канал формирования угла поворота дополнительных элементов и блока определения текущих экстремальных значений производных углов поворота позволяет на выходе устройства получать требуемый закон изменения углов поворота oi{t7, переводящий конец ИК из начального положения х(о(,)в требуемое X, учитываклций динамические характеристики ИК и приводов и соответствующие ему значения производных cf-{t) и dit). На фиг. 1 показана структурная схема устройства; на фиг. 2 - структурная схема одного из вариантов выполнения блока сиределеиия текущих граничных значений производных углов поворота; на фиг. 3 кинематическая схема ИК. Устройство (фиг. 1) содержит сумматоры 1-3, управляемые сумматоры 4 с ограничением, интеграторы 5-11, блок 12 преобразования угловых координат, вы псянение которого идентично соответствующей части устройства-прототипа, он содержит сумматоры 13-15, косинусные 102 94 ункциональные блоки 16-18, синусные ункциональные опоки 19-21, блоки 22 и 23 умножения, источник 24 опорного апряжения, масштабирующие делители 25-29. Кроме того, устройство содержит блок ЗО определения текущих граничных значений производных углов поворота. Входы прямоугольных координат х обозначены позициями 31-33, входы начальных значений углов oig 34-36, входы начальных значений угловых скоростей 37-39. Выходы 4О-42 соответствуют законам изменения углов поворота ef(k); 43-45 - значениям их первых производных d(tM6-48 значениям их вторых производных. Блок ЗО определения текущих граничных значений производных углов поворота (фиг. 2) содержит сумматоры 49-60, инверторы 61-62, блок 63 умножения, бяоки 64-67 деления, масщтабируюшие делители 68-79, входы 8О-89 напряжений смещения, тригонометрические блоки 9О92. Устройство работает следующим образом. На делителях 29 и 26 и 28, 25 и 27 устанавливаются в выбранном масщтаРа,, бе значения длин звеньев вечности. Напряжения, задающие требуемое движение искусственной конечности, определяемое декартовыми координатами ее конца )(.x5(t),x(t) поступают на входы 31-33. В каждом канале формирования углов на выходе интегратора 5 вырабатываются требуемые значения углов c(t). При практически реализуемых значениях коэффициентов передачи в сумматорах 1 и интеграторах 5 получаемые значения ci-(-t) отслеживают требуемые координаты X(tjc приемлемой динамической скиибкой (менее О,О1%). Далее в каждом канале формнровання угла поворота сигналы с выходов ннтег раторов 5 и сумматоров 1 подаются на систему сумматоров 2-4 и ингеграгоров 6-11, соединенных так, что они рещают следующие уравнения: ,кc( .Kcf .кс при oi. Ч при t/(i6 102 c(OJ oCpoL((.Q, i:((oid), (2) где Т, Чх - положительные коэффициенты; с/ . rtl - начальные значения углов пово рота и их скоростей, подающиеся на входы начальных значений интеграторов 7 и 6, 9 и 8, 11 и 1О, с входов 34 и 37 для первого канала, 35 и 38 для второго канала, 36 и 39 для третьего канала ° л1акс мин текущие максимально и минимально допустимые значения угловых ускорений, идущие на управляющие входы сумматоров 4 с ограничением, из блока ЗО. За счет этого напряжения на выходе интеграторов 7 и 9, 11, соответствующие значению с(-Ь) отслеживают значения напряжений на выходе интеграторов 5,соответствующие (i)c учетом динамических параметров приводов и ИК. При этом на выходе интеграторов 8 и 10 и. 6,напряжения соответствуют значениям угловых скоростей Х (t) а выходные напряжения на сумматорах 4 с ограничением соответствуют значению О- (-Ь). Напряжения, соответствующие значениям (/(tj, ct(t) и oL(i), подаются на выходы 4О и 43 и 46 устройства для первого канала формирования угла поворота 41 и 44 и 47 для второго и 42, 45 и 48 для третьего.Характер переходного процесса вблизи требуемых значений Ы, определяемый f и i| в уравнениях (2), может быть изменен соответственным выбором коэффициентов в .сумматорах 2 и 3 каждого канала формирования угла поворота. Блок 30 определения текущих граничных значений производных углов поворота может иметь различный вид в зависимости от степени полноты описания дина мики ИК и пртводов и ф1гнкционирует следующим образом. Пусть уравнения, описывающие динамику ИК и приводов, имеют следующий вид: ((c,C)u-(oi,6i,C), (3J где С - вектор параметров; В - функциональная матрица; - вектор-функция; U(U, , Jз) лектор управления. Тогда, зная ограничения на управляющие сигналы Ц-jyjp,j,j., параметры С и значения об, оС и О в каждый момент времени, можно определить экстре9мальные значения угловых ускорений в каждом канале i( S t M«Kcrff .C)J . MMHi( . t- MHHi-fK.C) Mc-KciK r i a c.i) минГ(..з) Лля примера будет считать, что вся масса m конечности сконцентрирована в ее конце и динамика ее достаточно точно описывается следующими уравнениями: , М, тс,(Х,,(а.2./,с.5о.,Х, ,,5in(ot2-ot3)-n. а р качестве приводов используются двигатели постоянного тока с независимым возбуждением, описываемые уравнениями вида U.C,.o,.S,M. . (6) где М,- - мочент нагрузки, Ц,,С.-постоянные коэффициенты, определяемые параметрами двигателя и редукторов.Тогда уравнения (3), описывающие динамику ИК (5) и приводов (6) имеют вид .. из-Сгз э- зз Г 2 К- з) 3SB-SB- 2 и блок определения текущих экстремальных значения производных углов поворота, реализующий уравнения (4) будет иметь вид, приведенный на фиг. 2, где на делителях устанавливают в выбранном масщтабе соответствующие значения: на 68,69-Г(Ц,+Сззте|)на 70-С 23 71Ss 72-С22,на 7З-то С mCgjiHa 75-2f ty. , на 77-гпС,, на 78- на 79 -С2. На входы напряжений смещения в выбранном масштабе подаются значения, срответч: тву юцгае 71О2 Лзмин -«eSO;U3 -на81;и -на 82i KC-«e 83; С :Г- на 84:6 ) на 86;U -н1 88; Цмакс-«« 9. Следует, отметить, что точность .1 логовых функциональных блоков, используемых для вычисления экстремальных зная чений ot(-tf может быть невысокой. Техника-экономическая эффективное ть от ксполг зования изобретений в системах управления движениями ИК заключается в том, что устройство позволяет получать не только целевые значения углов поворотов rf,Ho и строить весь закон их . изменения d (i./, причем автоматически обеспечивается плавность движения, что устраняет резкие импульсы ускорений и 9 перегрузки испопнительмых приводов; соновременно в устройстве формируются законы изменений производных ot(tlH igf-W, использование которых дает воэможность существенно повысить точность .Отработки программных траекторий (для типичных движений ИК - в 5-10 раз) Благодаря учету динамики ИК и привсАов устрс ство открывает возможность аддаиня таких траекторий, котор1де эавеАомо могут быть отработаны сувюствуюш исполнительной системой. Любое зввчительное отклшение аук отработке сф фмиро ваннЫ траектории может быть использовано, как дополнительная инфоркюдия об изменениях услою1Я функиионировагГия рибота, ценная для адаптивмеА подстройки систекоь управаеш1я .
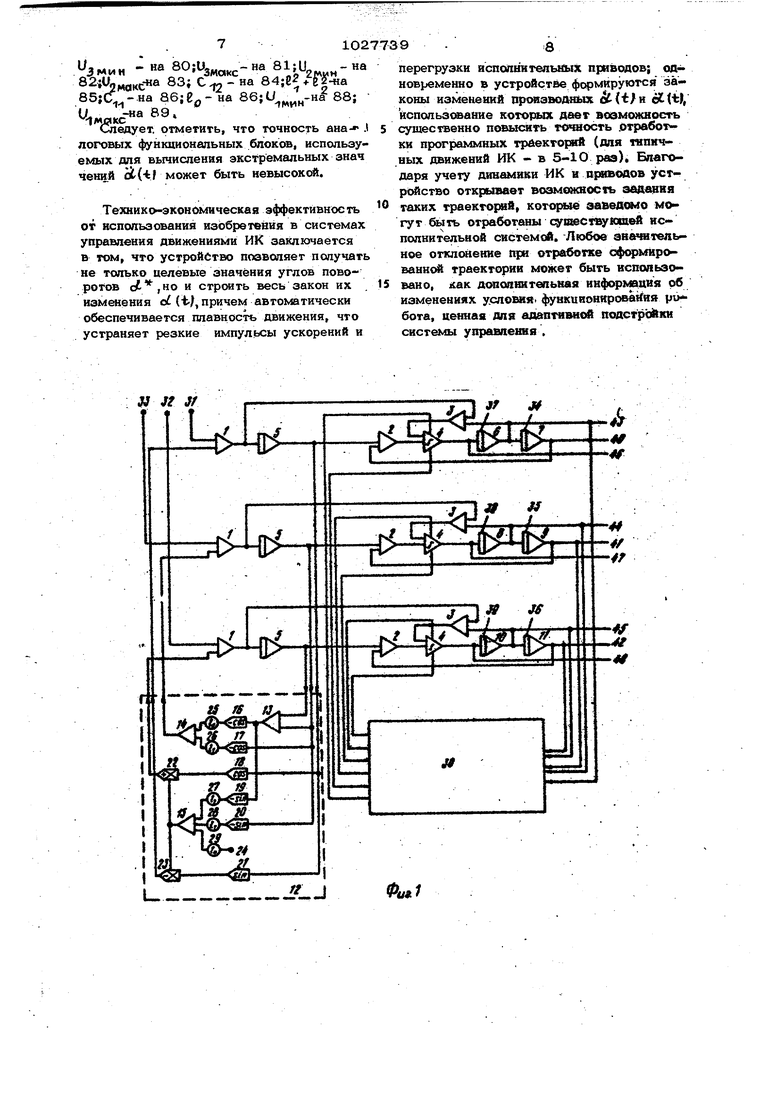
УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ТРЕХМЕРНСГО ВЕКТОРА ПРЯМОУГОЛЬНЫХ КООРДИНАТ КОНЦА ИСКУССТВЕННОЙ КОНЕЧНОСТИ В УГЛЫ ПОВОРОТА ЕЕ ЗВЕНЬЕВ, содержащее три канала формирования угла поворота, в каждом из которых первый вход первого сумматора соединен с входом соответствунлдей прямоугольной координаты устройства, выход первого сумматора через первый интегратор связан с соответствующим входом общего для всех каналов блока преобразования угловых координат в прямоугольные, соответствующий выход которого соединен с вторым входом первого сумматора соответствующего канала формирования угла поворота, отличающееся тем, что, с целью расщирения функциональных возможностей за счет одновременного определения законов изменения углов поворота и значений их производных с учетом динамических характеристик исполнительных механизмов, устройство содержит блок определения текущих граничных значений производных углов поворота и в каждом канале формирования угла поворота второй и третий сумматоры, второй и третий интеграторы и управляемый сумматор с ограничением, причем в каждом канале выход первого интегратора соединен с первым входом второго сумматора, выход первого сумматора - с первым входом третьего сумматора, выходы второго и третьего сумматоров соединены с соответствующими информационными входами управляемого сумматора с ограничением, выход которого через последовательно соединенные второй и третий интеграторы связан с вторым входом второго сумматора, выход второго интеграто-Р ра, соединенный с вторым входом треть- его сумматора, выход третьего интегра- {Л тора и выход управляемого сумматора с ограничением являются соответственно первым, вторым и третьим выходами ка- . нала формирования угла поворота, первый выход первого канала, первые и вторые выходы второго и третьего каналов подключены к соответствующим входам блока определения текущих граничных значений производных углов , первый и второй выходы которого соединены с соответствующими управляющими входами управляемого сумматора с (и раничением первого канала, третий и четвертый выходы - с управлякяцикш входами управляемого сумматора с ограничением второго канала, пятый и щестой выходы - с управляющими входами управляемого сумматора с ограничением третьего канала формирования угла поворота, входы начальных условий третьего и второго интеграторов каждого канала соединены с щинами задания начальных значений углов и их производных соответственно.
JJ J J/ Фм 1
ss
L.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Верещагин А | |||
| Ф., Минаев Л | |||
| Н | |||
| Принципы построения специализированных вычислителей для позиционного супервиэорного управления манипуляционным роботом | |||
| - Изв | |||
| АН СССР | |||
| Техническая кибернетика, 1978, № 4, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для преобразования трехмерного вектора прямоугольных координат конца искусственной конечности в углы поворота ее звеньев | 1977 |
|
SU785872A1 |
