(54) СПОСОБ УПРАВЛЕНИЯ ПЕРЕХОДНЫМ ПРОЦЕССОМ КАЧЕНИЯ КОЛЕСА АВТОМОБИЛЯ Изобретение относится к комбинированному управлению несколькими узла ми автотранспортных средств, в частности к антиблокировочному торможению автомобиля в связи с управлением двигателем или передачей. Известен способ управления переходным процессом качения колеса авто мобиля, состоящий в изменении прило женного к колесу тормозного момента в соответствии с условиями сцепления Изменения условий сцепления колеса с дорогой оценивают предварительно по величине угла поворота рулевого.коле са, поскольку поворот автомобиля пред ставляет собой один из факторов уменьшения запаса по сцеплению ClJ . Недостатком данного способа является то, что он не может быть исполь зован на участках прямолинейного дви жения. Наиболее близким к предлагаемому по технической сущности является спо соб управления переходным процессом качения колеса автомобиля, состоящий в изменении приложенных к колесу крутящего и тормозного моментов в соответствии с условиями сцепления, выявленными по.результатам измерения параметров данного переходного процесса качения и по результатам предварительной оценки тех же условий сцепления по предыдущему переходному процессу. Например, если параметры переходного процесса качения при нажимании на педаль акселератора соответствуют буксованию на скользкой дороге, то управление процессом торможения после такого буксования осуществляется применительно к скользкой дороге с самого начала, т. ё. не дожидаясь блокировки колеса или иных проявлений низкого сцепления в процессе текущего торможения; дальнейшее торможение осуществляют, ориентируясь на поступакядие сигналы о результатах измерений параметров процесса торможения И. Данный способ, однако, приспособлен лишь для ножного управления, а при автоматическом управлении неприменим. Цель изобретения - повышение эффективности управления путем повышения скорости адаптации управления к текущим условиям сцепления при автоматическом регулировании. Указанная цель достигается тем, что результаты предварительной оценки условий сцепления по предыдущему
переходному процессу учитывают в промежутке времени, определяемом ожидаемой продолжительностью сохранения условий сцепления и при первом изменении приложенных к колесу крутящего или тормозного моментов после установившегося режима качения.
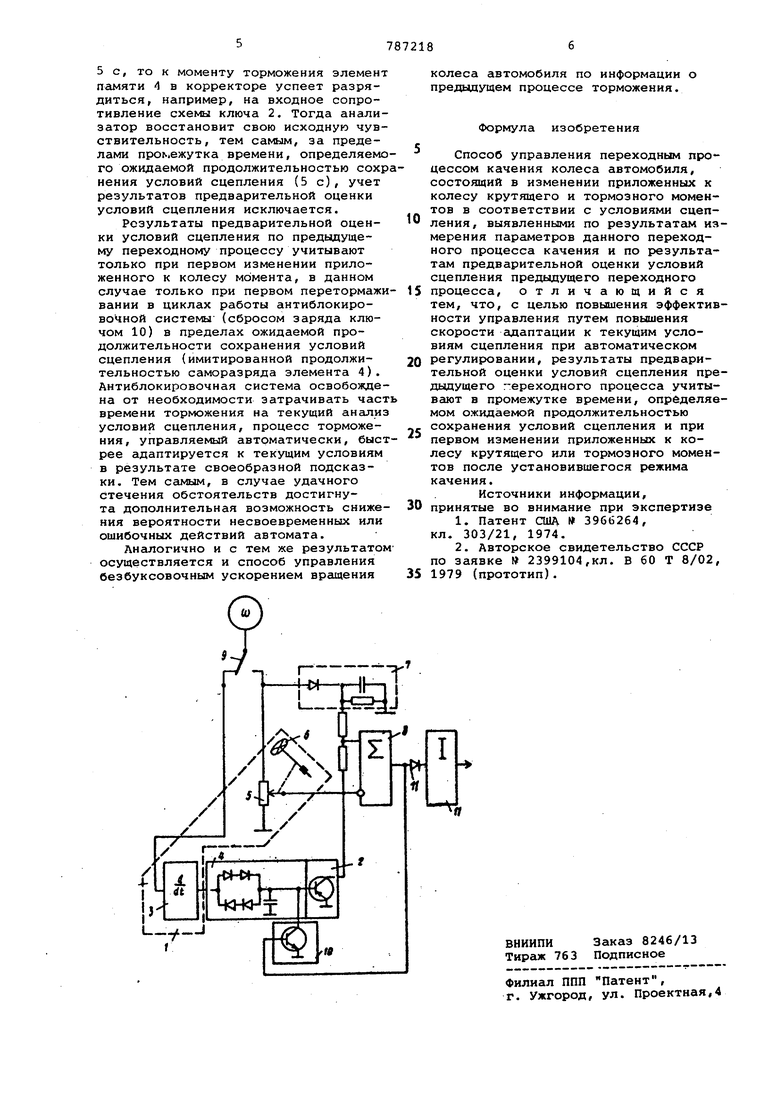
На чертеже показана схема устройства для осуществления данного способа управления.
Устройство для осуществления предлагаемого способа состоит из анализатора условий сцепления, в состав которого входит источник 1 информации об условиях сцепления и корректор с ключом 2. Этот анализатор вырабатывает команды регулирования приводного давления для тормоза. В составе источника 1 информации содержится детектор 3 буксования (например, дифференцирующее устройство), Детектор 3 соединен элементом 4 памяти, заряд которого способен запереть соединенный с элементом памяти ключ 2 корректора.Источник 1 содержит,кроме того,резистор 5 с приводом от органа 6 рулевого управления. Резистор 5 соединен с задатчиком 7 скорости вращения, колеса и с инвертирующим входом сумматора 8, другой вход которого соединен с выходом задатчика 7. Переключатель 9 соединен с тормозной педалью и может подключать датчик скорости колеса либо к задатчику 7 и резистору J, либо к детектору буксования. Для сброса учтенной информации, т. е для исключения использования информации о результатах измерения (или грубой оценки) параметров переходного процесса за пределами ожидаемой продолжительности сохранения условий сцепления и для осуществления растормаживания колеса предусмотрены соответственно, ключ 10, составляющий цепь разряда, соединенную с элементом 4 памяти, и пороговая логическая схема 11.
Если в результате чрезмерного открывания дроссельной заслонки двигателя произойдет буксование колеса, то это свидетельствует о несоответствии условий сцепления действующему на колесо тяговому моменту, а парамет буксования (угловое ускорение колеса в данном случае является качественным признаком указанного несоответствия , возникшего в результате поворота чрезмерно малого радиуса. В случае последующего вскоре торможения в тех же условиях, например в течение промежутка времени в несколько секунд, надлежит ограничивать приводное давление во избежание блокирования колеса. В данном случае значительное по величине ускорение вращения колеса выявляется детектором 3, который заряжает элемент 4 памяти. Элемент 4, в свою очередь, запирает ключ 2 корректора. В результате подготовлена выдача полного опорного сигнала с выхода задатчика 7 скорости вращения колеса на сумматор 8 (пока ключ 2 не был заперт, вход сумматора 8 был замкнут накоротко ключом 2). Поворот автомобиля (фактор снижения запаса по сцеплению) является признаком ухудшения условий сцепления колеса с дорогой. Этот признак появляется до начала управления переходным процессом качения колеса и тоже заблаговременно учитывается благодаря приводу резистора 5 от органа 6 рулевого управления источником 1 информации.
Уменьшение сопротивления резистора 5 подготавливает занижение сигнала скорости вращения колеса для инвертирующего входа сумматора 7. Следовательно, как под воздействием рулевого управления, так и под воздействием факта пробуксовки колеса, чувствительность анализатора в целом повышена по отношению к опорному сигналу, который может поступить на инвертирующий вход сумматора 8 со стороны задатчика 7 в случае торможения На этом входе опорный сигнал будет сравниваться с сигналом от резистора 5. Если нажать тормозную педаль вскоре после изложенных событий, то вслествие срабатывания группы контактов переключателя 9, детектор 3 прекращает получать информацию от колеса, н заряд элемента 4 памяти сохраняется поддерживает ключ 2 в разомкнутом сотоянии. Задатчик 7 скорости вращения колеса в момент срабатывания группы контактов переключателя 9 зарядится через эти контакты и выдаст на сумматор 8 полный сигнал, пропорциональный скорости автомобиля (или скорости буксования колеса, если буксованяе не прекратилось). Ввиду преобладания такого сигнала над заниженным на инвертирующем входе сигналом скорости вращения возникает импульс на выходе сумматора В. Этот импульс заставляет сработать логическую схему 11, по команде с которой осуществляется автоматическое растормаживание колеса. Одновременно оказывается открытым и ключ 10, сбрасывающий заряд элемента 4 и, тем самым снимающий всю предварительную коррекцию при первом же приложении к колесу тормозного элемента (кроме коррекции резистором 5, которая остается на все время совершения поворота) . Дальнейший процесс торможения осуществляется известным способом, как в антиблокировочных системах торможения благодаря простейшей имитации скорости автомобиля падающим зарядом задатчика 7.
Если от события буксования колеса до события начала торможения лроходит достаточно много времени, чтобы заблаговременная информация утратила свою ценность, например более