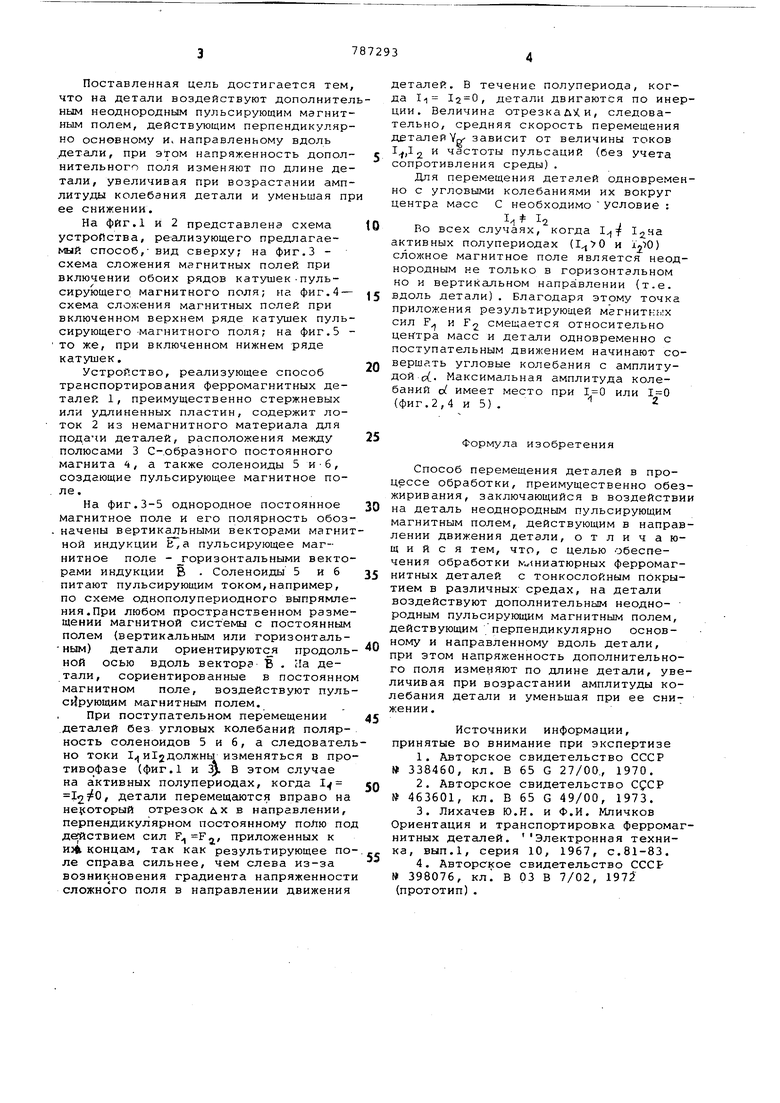
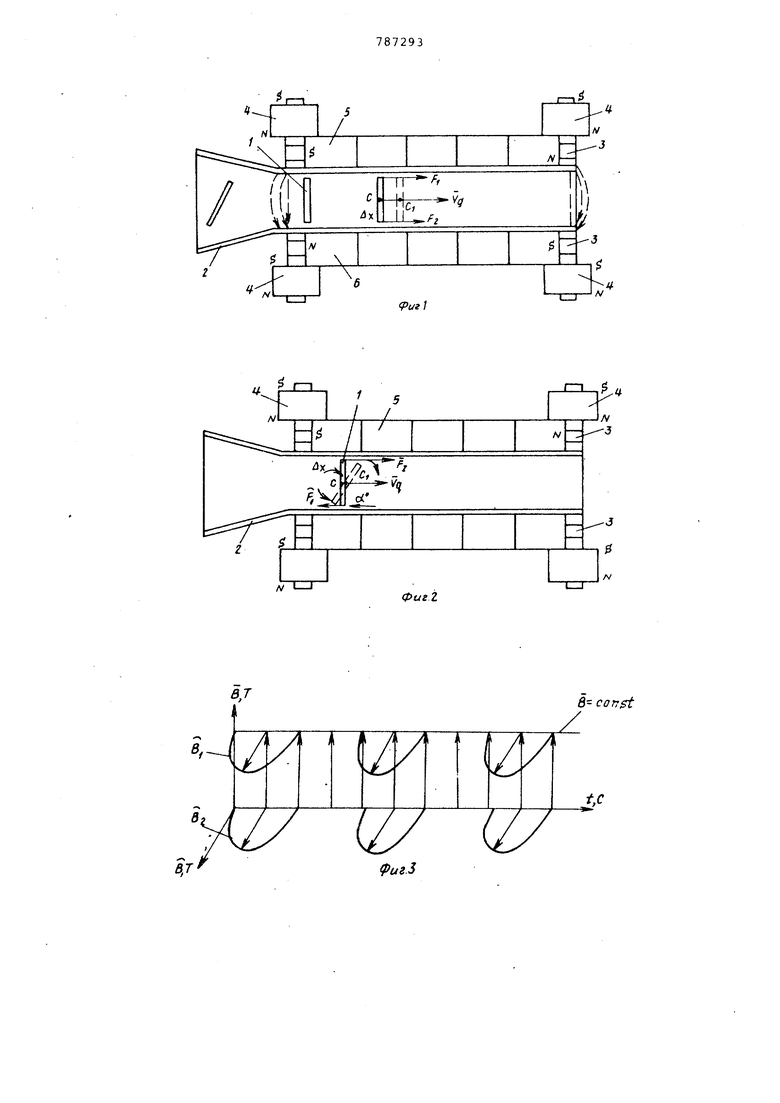
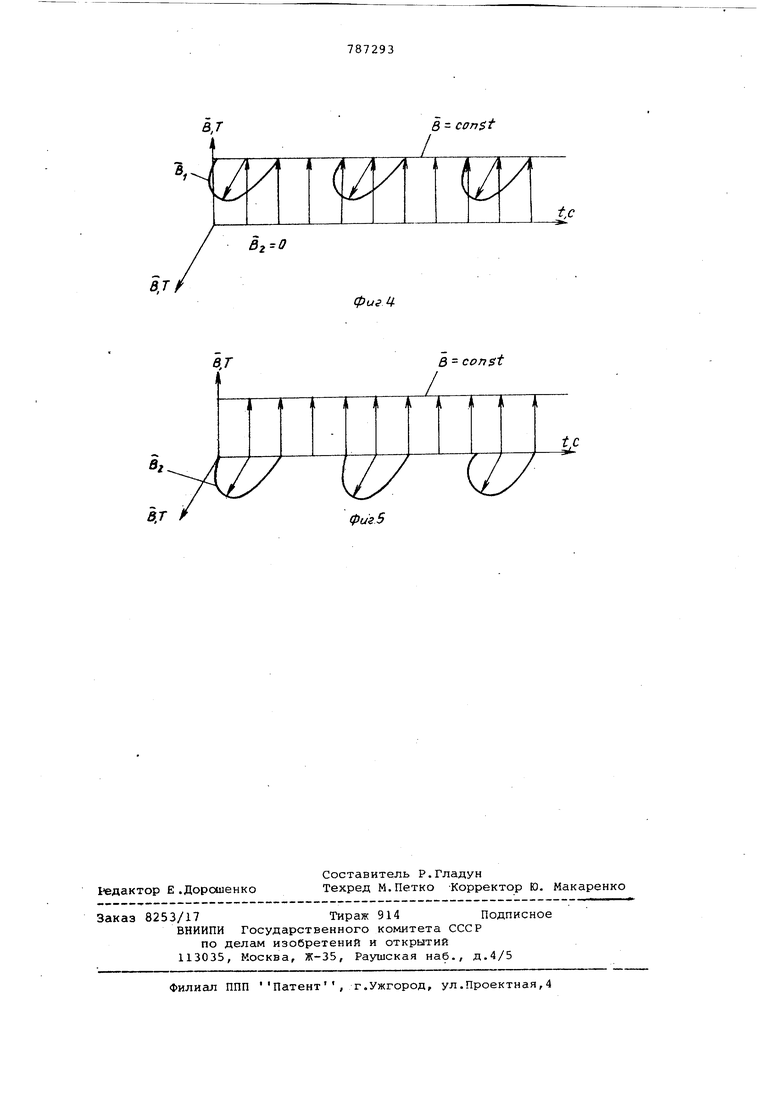
Изобретение относится к транспорт ной автоматике. Известен способ транспортирования деталей, сориентированных в постоянном магнитном поле, посредством вибротранспортеров 1. Основным-недостатком способа является невозможность обеспечения регулирования скорости поступательного движения деталей в требуемых пределах, а также отсутствие колебаний деталей при поступательном движении. Известен способ транспортирования деталей, сориентированных в постоянном магнитном поле, в которых детали транспортируют на движущейся гибкой ленте или посредством винтового транспортера 2. Недостатком этого способа является также затрудненная регулировка скорости движения деталей. Известен также способ транспортирования сориентированных ферромагнит ных деталей с помощью бегущего магнитного поля 3. Этому способу присущи те же недос татки, кроме того, детали при поступательном движении не могут совершат угловые колебания Наиболее близким к предлагаемому является способ перемещения деталей в процессе обработки, преимущественно обезжиривания, заключающийся в воздёКствии на деталь неоднородным пульсирующим магнитным полем, действующим в направлении движения детали 4. Способ сводится к очистке поверхностей от различных отложений путем действия упругой деформации, возбуждаемой одиночными механическими импульсами, разделенными паузами, что вызывает непосредственные колебания частиц твердого вещества очищаемой поверхности. Однако, это техническое решение не может быть использовано для обработки (обезжиривания, сушки, мойки) таких деталей, как миниатюрные ферромагнитные детали с тонкослойными покрытиями из-за механического контакта с транспортирующим органом в котором возбуждаются упругие колебания, что является причиной повреждения. Цель изобретения - обеспечение обработки миниатюрных ферромагнитных деталей с тонкослойным покрытием в различных средах. Поставленная цель достигается тем, что на детали воздействуют дополнител ным неоднородньлм пульсирующим магнитным полем, действующим перпендикулярно основному Hi направленному вдоль детсши, при этом напряженность дополнительного поля изменяют по длине детали, увеличивая при возрастании амплитуды колебания детали и уменьшая пр ее снижении. На фйг.1 и 2 представлена схема устройства, ре-ализующего предлагаемый способ,- вид сверху; на фиг.З схема сложения магнитных полей при включении обоих рядов катушек-пульсирующего магнитного поля; на фиг.4- схема сложения магнитных полей при включенном верхнем ряде катушек пульсирующего -магнитного поля; на фиг.З то же, при включенном нижнем ряде катушек. Устройство, реализующее способ транспортирования ферромагнитных деталек 1, преимущественно стержневых или удлиненных пластин, содержит лоток 2 из немагнитного материала для подачи детал-ей, расположения между полюсами 3 С-образного постоянного магнита 4, а также соленоиды 5 и - б, создающие пульсирующее магнитное поле. На фиг.3-5 однородное постоянное Магнитное поле и его полярность обоз. начены вертикальными векторами магнит ной индукции В,а пульсирующее магнитное поле - горизонтальными векторами индукции В Соленоиды 5 и б питают пульсирующим током,например, по схеме однополупериодного выпрямления.При любом пространственном размещении магнитной системы с постоянным полем (вертикальным или горизонталь- ным) детали ориентируютс я продоль ной осью вдоль вектора Б . Иа детали, сориентированные в постоянно магнитном поле, воздействуют пуль С1|рующим магнитным полем. При поступательном перемещении детсшей без угловых колебаний полярность соленоидов 5 и б, а следовател но токи 1 и12должны изменяться в про тивофазе (фиг.1 и ЗД. В этом случае на активных полупериодах, когда 1 , детали перемещаются вправо на не соторый отрезок дх в направлении, перпендикулярном пос-тоянному поЛю по действием сил F Fa приложенных к и:. концгим, так как результирующее по ле справа сильнее, чем слева из-за возник новения градиента напряженност сложного поля в направлении движения деталей. В течение полупериода, когда 1-1 12 0, детали двигаются по инерции. Величина отрезкад(и, следовательно, средняя скорость перемещения деталей Yry- зависит от величины токов 1,12 частоты пульсаций (без учета сопротивления среды). Для перемещения деталей одновременно с угловыми колебаниями их вокруг центра масс С необходимоусловие : 1 12, Во всех случаях, когда активных полупериодах ( и ) сложное магнитное поле является неоднородным не только в горизонтальном но и вертикальном направлении (т.е. вдоль детали). Благодаря этому точка приложения результирующей магниткь:х сил F и F2 смещается относительно центра масс и детали одновременно с поступательным движением начинают соверщать угловые колебания с амплитудой е{. Максимальная амплитуда колебаний ci имеет место при или (фиг.2,4 и 5) . 2 Формула изобретения Способ перемещения деталей в процессе обработки, преимущественно обезжиривания, заключающийся в воздействии на деталь неоднородным пульсирующим магнитным полем, действующим в направлении движения детали, о т л и ч а ющ и и с я тем, что, с целью обеспечения обработки ,1ниaтюpныx ферромагнитных деталей с тонкослойным покрытием в различных средах, на детали воздействуют дополнительным неодно- родным пульсирующим магнитным полем, действующим перпендикулярно основному и направленному вдоль детали, при этом напряженность дополнительного поля изменяют по длине детали, увеличивая при возрастании амплитуды колебания детали и уменьшая при ее снижении. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 338460, кл. В 65 G 27/00., 1970. 2.Авторское свидетельство № 463601, кл. В 65 G 49/00, 1973. 3.Лихачев Ю.Н. и Ф.И. Мличков Ориентация и транспортировка ферромагнитных деталей. Электронная техника, ВЫП.1, серия 10, 1967, с.81-83. 4.Авторское свидетельство СССР W 398076, кл. В 03 В 7/02, 197 (прототип) .
/V
Фиг2.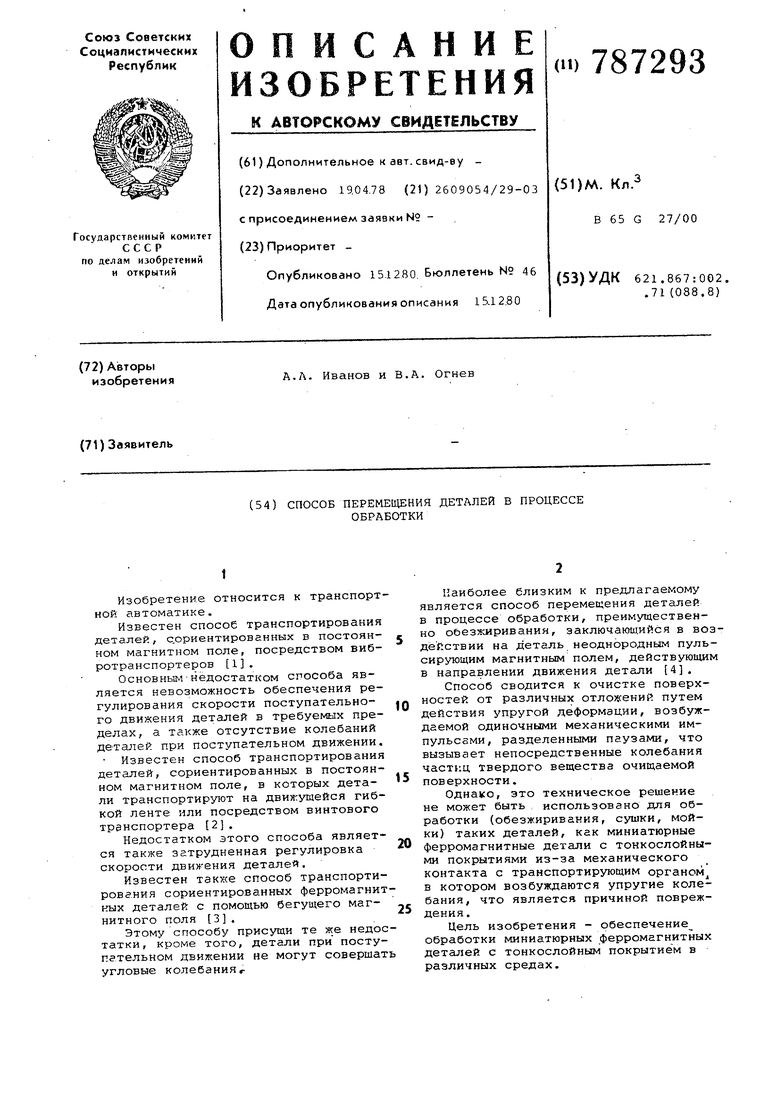
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для упаковки плоскихфЕРРОМАгНиТНыХ дЕТАлЕй | 1979 |
|
SU806535A1 |
| Устройство для поштучной выдачи ферромагнитных деталей | 1982 |
|
SU1047793A1 |
| Устройство для групповой укладки ферромагнитных деталей | 1977 |
|
SU627019A1 |
| Устройство для сортировки деталейиз фЕРРОМАгНиТНОгО МАТЕРиАлА | 1979 |
|
SU848081A1 |
| Способ намагничивания движущихся ферромагнитных деталей | 1987 |
|
SU1511773A1 |
| ВИБРОНАСОС | 1993 |
|
RU2066794C1 |
| Способ термообработки дисперсных материалов и аппарат для его осуществления | 1981 |
|
SU1109564A1 |
| МОСТОВАЯ СХЕМА ПРОВЕРКИ ВРАЩАТЕЛЬНОГО МАГНИТОДИНАМИЧЕСКОГО ЭФФЕКТА | 2014 |
|
RU2561143C1 |
| УСТРОЙСТВО ДЛЯ СТИРАНИЯ ЗАПИСИ НА МАГНИТНОМ НОСИТЕЛЕ | 2002 |
|
RU2239884C2 |
| Способ бесконтактной магнитной ориентации деталей | 1973 |
|
SU501535A1 |
ВТ
в- congt
в.
fl;
i.c
фигЛ
В,
в const
/
1 il
и
