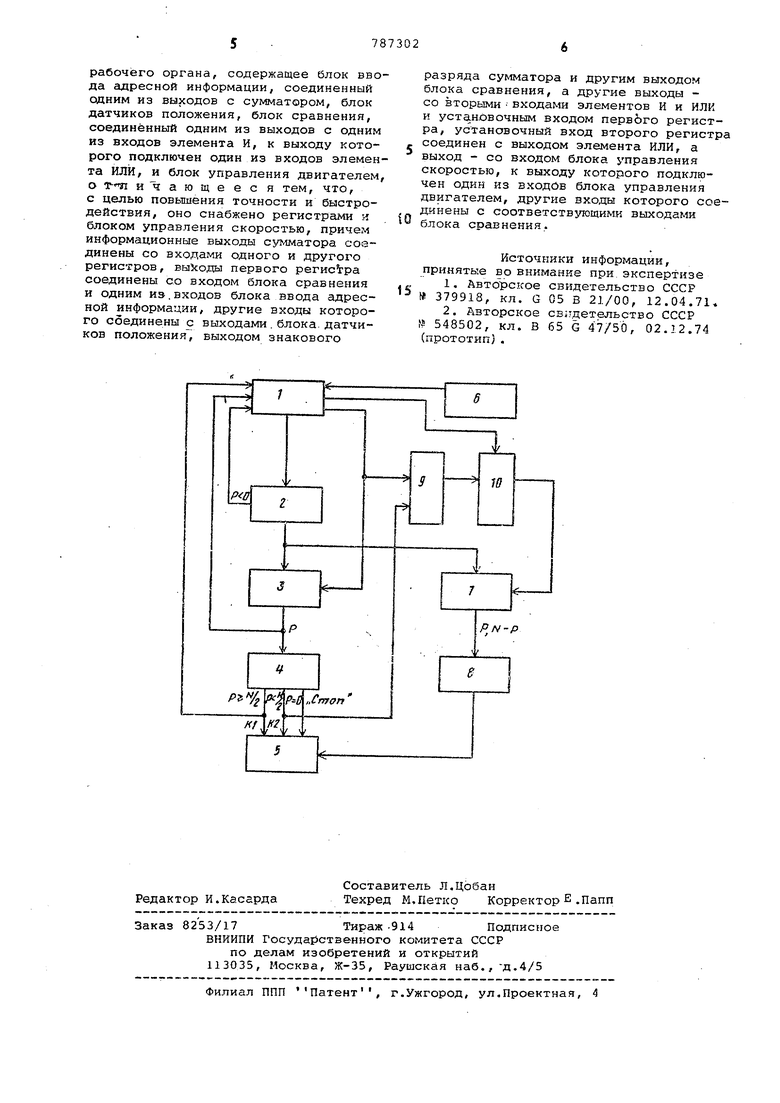
Изобретение относится к автоматизации промышленных установок и может быть использовано в системах управле ния стеллажами элеваторного -лпа, ко вейерами-накопителями, магазинами, библиотеками и т.п. Известно устройство для управлени перемещением полок механизированных стеллажей, содержащее блок ввода адресной информации, соединенный с сум матором, блок датчиков положения, бл сравненик и блок управления двигателей 11 . Недостаток этого устройства - выбор полок осуществляется только при наличии одной станции вызова, -невоэмо ность управления скоростью перемещения полок, поэтому скорость перейещения ограничена точностью устан ки полок. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления механизмами с замкнутой трассой следования рабочего органа, содержгидее блок ввода адресной информации, соединенный одним из выходов с; сумматором, блок датчиков по ложения, блок сравнения, соединенный одним из выходов с одним КЗ входов элемента И, к выходу которого подключен один И входов элемента ИЛ11, и блок управления двигателем 2, Недостаток этого устройства - невысокие точность и быстродействие. Цель изобретения - повышение точности и быстродействия. Поставленная цель достигается тем, что устройство снабжено регистрами и блоком управления скоростью, причем информационные выходы сумматора соединены со входакш одного и другого регистров, выходы первого регистра соединены со входом блока сравнения и одним из вводов блока ввода адресной информации;- другие входы которого соединены с в ыходами блока датчиков положения, выходом знакового разряда сумматора и другим выходом блока сравнения, а другие выходы - со вторыми входами элементов И и ИЛИ и установочным входом первого регистра, установочный вход второго регистра соединен с выходом элемента ИЛИ, а выход - со входом блока управления скоростью, к выходу которого подключен один из входов блока управления двигателем, другие входы которого соединены . с соответствующими выходами блока сравнения. На чертеже изображена функциональная схема устройства. Устройство содержит блок 1 ввода адресной информации, соединенный с сум матором 2 накапливающего типа, соединенные последовательно регистр 3 и блок 4 сравнения,, к выходу которого подключен блок 5 управления д.зигателем, блок б датчиков положения, регистр 7, блок 8 управления скорость перемещения, логические элементы И 9 и ИЛИ 10, Устройство обеспечивает выбор направления перемещения вызываемой ячейки pa6o«iero органа по кратчайшему пути при наличии нескольких станций остановок и управляет скоростью переМещения рабочего органа в зависимости от расстояния требуемой ячейки до требуемой станции. Устройство реализует следуюгфй алгоритм: -А-В-С7О нl2к A.-B-C O A-B-C- -N7O NJ2K2 l -B-C- -N O A-B-O- -N-vNbO где А - номер требуемой ячейки рабо чего органа; В - номер ячейки рабочего органа расположенный у станции с но мером 0; С- номер станции остановки;. N - количество ячеек рабочего ор гана; К1 -команда, определяющая переме щение по кратчайшему пути по ходу часовой стрелки; К2 -то же, против хода часовой стрелки; Р - код в сумматоре,, равный расстоянию от требуемой станции до требуемой ячейки по ходу часовой стрелки; N/2-округленная до целого числа величина, равная половине ко личества ячеек (N/2 -g-, если N - четное и N/2 , если N - не четное). Ячейкам присвоены номера по порядку О, 1, 2,..о,А.,...В.,...N-Г по ходу часовой стрелки, а станциям О, 1, 2, ..,.С.,N-1, Количество станций принято равным количеству ячеек рабочего органа. Пр уменьшении количества станций номера оставшихся не изменяются. Предлагаемое устройство работает следующим образом. В накапливающем сумматоре 2 произ водится cy 1миpoвaниe номеров А,В,С, подаваемых в соответствующем коде с блока 1 ввода, т.е. производится действие PI-B-C. Если результат вычитания число отрицательное, то в знаковом разряде сумматора 2 появляется , по сигналу которого блок 1 ввода подает на сумматор 2 число N столько раз, пока число в сумматоре 2 не станет положительным. Легко убедит;ься, что положительное число в сумматоре 2 равно расстоянию по ходу часовой стрелки от требуемой ячейки рабочего органа до требуемой станции, а отри-- цательное - против хода часовой стрелки, поэтому в результате суммирования его с числом N (периодом повторения номеров замкнутого рабочего органа) получается число, равное расстоянию до требуемой станции по ходу часовой стрелки. После этого число Р сигналом со второго выхода блока 1 ввода вводится в регистр 3, и, если число PN/2, этим же сигналом через логические элементы И 9 и ИЛИ 10- в регистр 7, Еали , то по сигналу с выхода блока 4 сравнения в блок 1 ввода, в сумматоре 2 производится действие и сигналом с выхода блока 1 ввода через логический элемент ИЛИ 10 на регистр 7 результат вычитания сумматора 2 вводится в регистр 7. В регистре 3 всегда записано число, равное расстоянию от требуемой ячейки рабочего органа до требуемой станции по ходу часовой стрелки, в регистре 7 - число, равное кратчайmefviy расстоянию от требуемой ячейки до требуемой станции, служащее для управлений, скоростью перемещения рабочего органа, так как при приближении требуемой ячейки и требуемой станции это число уменьшается, поэтому блок 8 управления скоростью перемещения ступенчато или плавно изменяет выходную величину (напряжение частоту и т.п.) согласно выбранному способу регулирования скорости- двигателя блока 5 управления, подаваемой на исполнительный двигатель. Так осуществляется быстрое и точное позиционирование рабочего органа, т.е. скорость перемещения зависит от рассогласования положений рабочего органа. При прохождении каждой ячейки мимо станции с нулевым номером блок б датчиков положения формирует код ячейки и передает его в блок 1 ввода. Когда число А-В-С будет равно О, то блок 4 сравнения сформирует команду Стоп. Перемещение прекращается, требуемая ячейка останавливается- точно у необходимой станции. Формула изобретения Устройство для управления механизмами с замкнутой трассой следования
рабочего органа, содержащее блок ввода адресной информации, соединенный одним из выходов с сумматором, блок датчиков положения, блок сравнения, соединённый одним из выходов с одним из входов элемента И, к выходу которого подключен один из входов элемента ИЛИ, и блок управления двигателем о т-Ч и ающееся тем, что, с целью повышения точности и быстродействия, оно снабжено регистрами я блоком управления скоростью, причем информационные выходы сумматора соединены со входами одного и другого регистров, выводы первого регистра соединены со входом блока сравнения и одним из.входов блока ввода адресной информации, другие входы которого соединены с выходами.блока, датчиков положения, выходом знакового
разряда сумматора и другим выходом блока сравнения, а другие выходы со вторыми входами элементов И и ИЛИ и установочным входом первЬго регистра, установочный вход второго регистра соединен с выходом элемента ИЛИ, а выход - со входом блока управления скоростью, к выходу которого подключен один из входив блока управления двигателем, другие входы которого соединены с соответств тощими выходами блока сравнения.
Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 379918, кл. G 05 В 21/00, 12.04.71
2. Авторское свидетельство СССР № 548502, кл. В 65 G 47/50, 02.12.74 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением механизма по замкнутой трассе | 1979 |
|
SU870296A1 |
| Устройство для управления перемещением полок механизированных стеллажей | 1974 |
|
SU548502A1 |
| Устройство для управления перемещением полок механизированных стеллажей | 1983 |
|
SU1129588A2 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| СИСТЕМА УПРАВЛЕНИЯ СВАРОЧНЫМ ПРОЦЕССОМ | 1990 |
|
RU2126737C1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Токарно-винторезный станок | 1987 |
|
SU1526954A1 |
| Устройство управления зажиганием двигателя внутреннего сгорания | 1987 |
|
SU1492076A2 |
| Многокоординатное устройство для управления | 1987 |
|
SU1522155A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
