Изооретение относится к прокатному производству в металлургии и может быть испол: эовано в автоматических системах управления работой прокатных станов. Известно устройство для установки валков на параллельность, содержащее приводы левого и правого нажимных вин тов, соединенные с левыми и правыми нажимными винтами, входы приводов соединены соответственно с выходами пер вого и второго алгебраических сумматоров, первые входы которых соединены с выходом первого ключа, а вторые входы - с выходом второго ключа, информационный вход второго ключа соединен с выходом элемента совпадения, датчики давления с левой и-, правой сто рон валков, выходы которых соединены соответственно с первым и вторым вхо дами третьего сумматора и элемента сравнения, выход элемента сравнения соединен с информационные входом пер вого ключа, выход третьего сумматора соединен со входом первого порогового, элемента, выход которого соединен со входом первого инвертора, выход которого соединен с первым входом элемента совпадения, на второй вход которого подается команда на установку валков, а на управляющий входпервого ключа подается команда на устранение перекоса валков. При подаче команды на установку валков, открывается второй ключ и на вход приводов левого и правого нажимных винтов через первый и второй алгебраический сумматоры поступает сигнал от эталонного источника, вызывающий совместное движение нажимных винтов в сторону уменьшения раствора валков.Когда валки соприкоснутся и суммарное давление под левым и правым нажимными винтами достигнет заданного ,з1#ачения , сигнал с выхода третьего сумматора вызывает срабатывание первого порового элемента, который через инвертор и элемент совпадения закрывает второй ключ и совместное движение нажимных винтов прекращается. Если давление под левым и правым нажимными винтами неодинаковое на выходе элемента сравнения имеется ненулевой сигнал. При подаче оператором команды на устранение перекоса валков, открывается первый ключ и на входы первого и второго сумматоров подается- сигнал с выхода элемента сравнения, вызывая встречное движение нажимных винтов до тех пор, пока сигнал на выходе элемента сравнения не станет равньли нулю. При этом валки считаются установленными параллельно Описанное устройство хорошо выпол няет свое назначение, если крутизна характеристики датчиков усилия одина кова и неизменна в процессе эксплуатации tl . Однако на практике крутизна харак теристик датчиков усилия изменяется в процессе эксплуатации, причем изме няется неодинаково дла левого и правого датчиков. Причинами изменения крутизны характеристик являются потери сопротивления изоляции, усталос ные явления в магнитрупругих элементах датчиков, загрязнения контактной поверхности и др. Неодинаковое изменение крутизны характеристик левого и правого датчиков приводит к потере точности установки валков на параллельность и необходимости замены дат „чиков усилия. Это требует извлечения датчиков из прокатной клети,что возможно только во время ремонта стана, Цель изобретения - повышение точности установки. Указанная цель достигается тем, что вустройство, содержащее приводы левого и правого нажимных винтов, со единенные с левым и правым нажимными винтами, входы приводов соединены, со ответственно/ с выходами первого и второго алгебраических сумматоров, первые входы которых соединены с выходом первого ключа, датчики давлени с левой и правой стороны клети,- выходы которых соединены, соответственно с первым и вторым входами третьего сумматора, выход которого через пороговый элемент соединен со входом первого инвертора, информационный вход второго соединен с выходом эталоннохо источника, и элемент совпадения, на первый вход которого подает ся команда на установку валков, дополнительно введены четвертый алгебраический сумматор, блок выделения отрицательного раствора,содержащий пятый алгебраический сумматор, первый и второй входы которого являются первым и вторым входами блока выделения отрицательного раствора, выход пятого сумматора соединен со входом масштабного преобразователя, выход -которого через третий ключ и первый интегратор соединен., с третьим входом пятого сумматора, управляющий вход третьего ключа является третьим входом, а выход масштабного преобразователя является также выходом блока выделения отрицательного раствора датчики положения левого и правого нажимных винтов, блок согласования Хп зактеристик датчиков давления, содержащий шестой, седьмой и восьмой алгебраические сумматоры, первые входы шестого и седьмого алгебраических, сумматоров являются первым и вторым входами .блока согласования характеристи1с датчиков давления, вторые входы DjecToro и седьмого алгебрат ических сумматоров соединены, соответственно, с выходами второго и третьего интеграторов, первые входы которых через четвертый и пятый ключи соединены, соответственно, с выходами шестого и седьмого алгебраических сумматоров,выходы шестого и седьмого сумматоров соединены также с первым и вторым входами восьмого алгебраического сумма тора, в ьлх од седьмого алгебраического сумматора.кроме того соединен с первым входом блока умножения, второй. вход которого соединен с выходом четвертого интегратора, вход которого через шестой ключ соединен с выходом восьмого алгебраического сумматора, выход блока умножения соединен с третьим входом восьмого алгебраического сумматора, выход которого является также выходом блока согласования характеристик датчиков давления, управляющие входы четвертого и пятого ключей являются третьим входом, сбросовые вхо,.ы второго и третьего интеграторов являют- . ся четвертым входом, а управляющий вход шестого ключа является пятым входом блока согласования характеристик датчиков давлений, блок управления, содержащий второй и третий пороговые элементы, входы которых являются первым входом блока управления, выход второго порогового элемен1а соединены со входом второго инвертора,выход которого является первым выходом блока управления,выход третьего порогового элемента соединен со входом третьего инвертора и вторым входом элемента совпадения, выход третьего порогового элемента является вторым, а выход третьего инвертора является третьим выходом блока управления, третий вход элемента совпадения через элемент задержки на отпускание и ч-ерез четвертый инвертор соединен с выходом нуль-органа, вход которого является вторьс входом блока управления, первый вход элемента совпадения является третьим входом блока управления, а выход элемента совпадения является четвертьлм выходом блока Управления, причем вторые входы первого и второго алгебраических cyMMaTqpoB соединены с выходом четвертого алгебраического сумм тора, первый вход которого соединен с выходом- второго ключа, второй вход четвертого алгебраического сумматора соединен с выходом блока вьщеления отрицательного раствора и первым входом блока управления, первый и второй входы блока выделения отрицательного раствора соединены, соответственно, с выходами датчиков положений левого и правого, нажимных винтов, третий вход -блока выделения отрицательного
раствора соединен с выходом первого инвертора, выходы датчиков давления с левой и правой сторон клети соединены, соответственно, с первым и вторым входами блока согласования характеристик датчиков давления, третий, четвертый и пятый входы блока согласования характеристик датчиков соединены, соответственно, с первым, вторым и. третьим выходами блока управления, вьлход блока согласования характеристик датчиков давления соединен со вторым входом блока управления и информационным входом первого ключа, управляющий вход которого соединен с четвертым выходом блока управления, на третий вход которого подают внешнюю команду на установку валков.
Введение блока выделения отрицательного раствора валков, связанного с датчиками положения нажимных винто содержащето алгебраический сумматор и масштабный преобразователь, .охваченные отрицательной обратной связью через ключ и интегратор, позволяет на выходе блока получить сигнал, пропорциональный отрицательному раствору валков, т.е. полусумме перемещени нажимных винтов вниз после момента касания валков,который определяется пороговым элементом, соединенным с третьим алгебраическим сумматором, на выходе которого сигнал пропорционален сумме давлений с обеих сторон клети/ вследствие того, что пороговы элемент через инвертор управляет ключом на входе интегратора и обрьшает отрицательную обратную связь после касания валков.
Использование полученного сигнала отрицательного раствора в блоке упраления дает возможность определить момент, начиная с которого перекос валков под действием усилия сжатия (вследствие сплющивания валков и деформации упругих элементов клети) становится равным нулю (срабатывание второго порогового элемента), а также момент,: начиная с которого крутизна характеристик левого и правого датчиков давления согласована с заданой точностью (срабатывание третьего порогового элемента).
Использование сигналов блока упраления в блоке согласования характеристик дает возможность при срабатывании второго порогового элемента отключить отрицательные обратные связи через ключи и интеграторы, охватывающие шестой и седьмой алгебраические сумматоры,и на выходе этих сумматоро при дальнейшем сближении валков выделить сигналы, характеризующие только крутизну характеристик.левогои правого датчиков давления, так как после срабатыва шя второго порогового элемента перекос валков уже отсутствует. Рведенио узла, содержащего
блок умножения, четвертый интегратор, шестой ключ, позволяет изменить крутизну характеристики канала от правого датчика давления до выхода восьмого алгебраичес сого сумматора до тех пор, пока она не сравняется (с заданной точностью) с крутизной характеристики канала от левого датчика давления до выхода восьмого сумматора. При срабатьшании третьего порогового элемента происходит отключение шестоОго ключа и сброс второго и третьего интеграторов, вследствие чего на выходе восьмого алгебраического сумматора выделяется сигнал, пропорциональный только перекосу валков, ко5торый через первый ключ, связанный с блоком управления,-вызывает устранение перекоса нaжимны «и винтами до тех пор. пока величина перекоса не станет меньшие порога срабатывания
0 нуль-органа блока управления. Таким образоМр введение дополнительных блоков и связей между ними позволило в процессе обжатня валков при установке произвести автоматическое устране5ние разности крутизны характеристик левого и правого датчиков давления, в результате чего точность установки Ba. на параллельность с -щественно выше чем в известном устройстве.
0
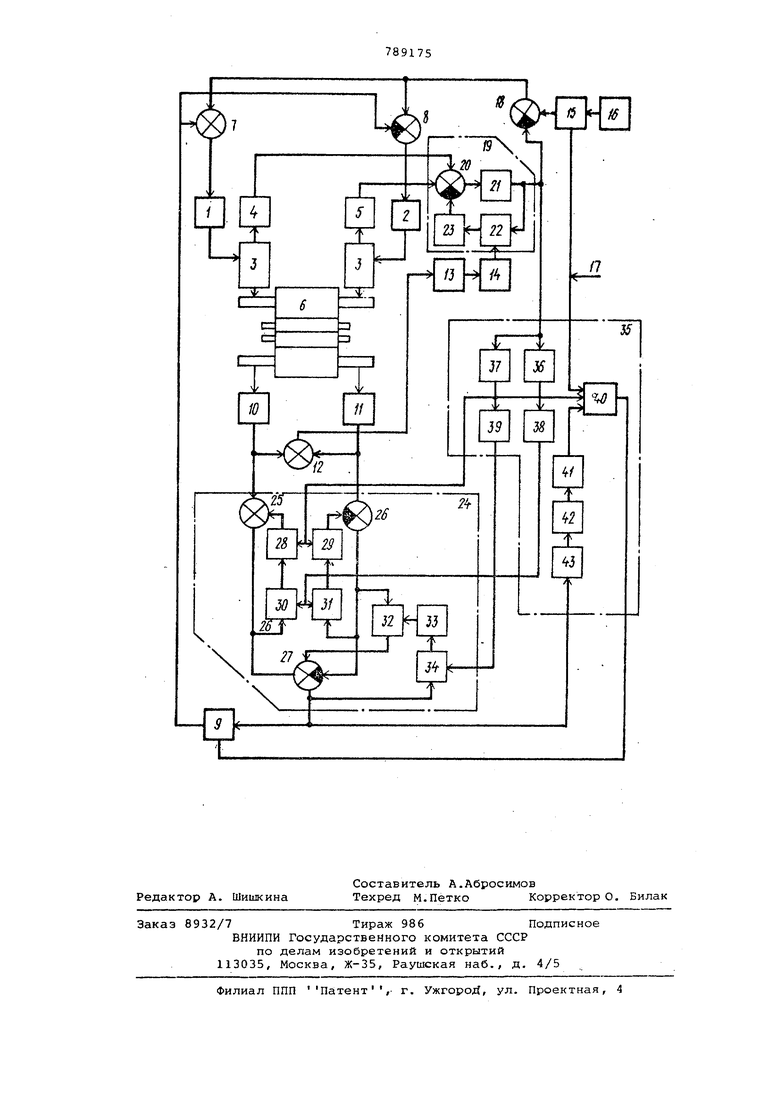
На чертеже предстаалена функциональная схема устройства.
Левый :-1 правый приводы 1 и 2 нажи.мных винтов 3 соединены с датчиками 4 и 5 положения левого и правого
5 нажимных винтов 3 и подум ами верхнего опорного валка 6, Входы приводов 1 и 2 соединены, соответственно, с выходами первого и второго алгебрамческих сумматоров 7 и 8. Первые входы алгебраических с мматоров 7 и 8 сое0динены с выходом первого ключа 9. Использованы датчики 10 и 11 давления с левой и правой сторон клети, выходы которых соединены, соответственно, с первым и вторым входом третьего
5 алгебраического сумматора 12, выход которого через первый пороговый элемент 13 соединен со входом первого инвертора 14, второй ключ 15jинформационный вход которого соединен с
0 выходом эталонного источника 16, на управляющий вход второго ключа подают внешнюю команду 17 на установку валков. В устройство также входят четвертки алгебраический сумматор 18,
5 блок 19 выделения отрицательного раствора содержащий пятый алгебраический сумматор 20, первый и второй выходы которого являются первым и вторым входами блока 19 выделения отрицательного раствора, выход пятого
Q сумматора соединен со входом масштабного преобразователя 21, выход которого через третий ключ 22 и первый интегратор 23 соединен с третьим входом пятого сумматора 20, управляющий
вход третьего ключа является третьим входом, а выход масштабного преобразователя 21 является также выходом блока 19 выделения отрицательного раствора, датчики 4 и 5 положения левого и правого нажимных винтов 3, блок 24 согласования характеристик датчиков 10 и 11 давления, содержащий .шестой, седьмой и восьмой алгебраические сумматоры 25 - 27, первые входы шестого и седьмого алгебраических сумматоров 25 и 26 являютея первым и вторым входами блока
24согласования характеристик датчиков 10 и 11 давления, вторые входы шестого и седьмого алгебраических сумматоров 25 и 26 соединены, соответственно, с выходами второго и третьего интеграторов 28 и 29, первые входы которых через четвертый
и пятый ключи 30 и 31 соединены, соответственно, с выходами шестого и седьмого алгебраических сумматоров
25и 26, выкоды шестого и седьмого сумматоров 25 и 26 соединены также с первым и вторым входами восьмого алгебраического сумматора 27, выход седьмого алгебраического сумматора
26, кроме того, соединен с первым входом блока 32 умножения, второй вход которого соединен с выходом четвертого интегратора 33, вход которого через шестой ключ 34 соединен с выходом восьмого алгебраического сумматора 27, выход блока 32 умножения сое-динен, с третьим входом восьмого алгебраического сумматора 27, выход которого является также выходом блока 24 согласования характеристик датчиков 10 .и 11 давления, управляющие входы четвертого и пятого ключей 30 и 31 являются третьим входом, сбросовые входы второго и третьего интеграторов 28 и 29 являются четвертым, входом а управляющий вход шестого ключа 34 является пятым входом блока 24 согласования характеристик датчиков 10 и 1 давления,блок 35 управления,содержащи второй и третий пороговые элементы 36 и 37,входы которых являются первым входом блока 35 управления,выход второго порогового элемента 36 соединен со входом второго инвертора 38, выход которого является первым выходом 35 управления,выход третьего порогового элемента 37 соединен со вхрдфм третьего инвертора 39 и вторым вводом элемента 40 совпадения, выход третьего порогового элемента 37 является вторым, а выход третьего инвертора 39 является третьим выходами блока 35 управления, третий вход элемента 40 совпадения через элемент 41 задержки на отпускание и через четвертый инвертор 42 соединен с выходом нуль-органа 43, вход которого являетря вторым входом блока 35 управления, первый вход элемента 40 совпадения является третьим входом блока 35 управления, а выход элемента 40 совпадения является четвертым выходом блока 35 управления, причем вторые входы первого и второго алгебраических сумматоров 7 и 8 соединены с выходом четвертого алгебраического сумматора 18, первый вход которого соединен с выходом второго ключа 15, второй вход четвертого алг-ебраического сумматора 18 соединен с выходом блока 35 выделения отрицательного раствора и первым входом блока 35 управления, первый и второй входы блока 19 выделения отрицательного раствора соединены, соответсвенно, с выходами датчиков 4 и 5 положения левого и первого нажимных винтов 3, третий вход блока 19 выделения отрицательного раствора соединен с выходом первого инвертора 14, выходы датчиков 10 и
11давления с левой и правой стороны клети соединены, соответственно, с первым и вторым входами блока 24 согласования характеристик датчиков 10 и 11 давления-, третий, .четвертый и пятый входы блока 24 согласования
характеристик датчиков 10 и 11 давления соединены, соответственно/ с первым, вторым и третьим выходами блка 35 управления, выход блока 24 согласования характеристик датчиков 10 и 11 давления соединен со вторым входом блока 35 управления и информационным входом первого ключа 9, упраляющий вход которого соединен с четвертым выходом блока 35 управления, на третий вход которого подают внешнюю команду 17 на установку валков.
Устройство работает следующим образом.
В исходном состоянии ключи 9 и 15 отключены, а ключи 22, 30 и 31 включены. При подаче команды 17 на устаноку валков открьшается ключ 15 и сигнал с эталонного источника 16 через алгебраические сумматоры 18,7 и 8 поступает на входы приводов 1 и 2 левого и правого нажимных винтов 3, вызывая совместное перемещение нажимных винтов 3 в сторону уменьшения раствора валков. Одновременно команда 17 через третий входблока 35 управления поступает на первый вход элемента 40 совпадения.
Сигналы с выходов датчиков 4 и 5 положения нажимных винтов 3 поступают на входы алгебраического сумматора 20 блока 19 выделения отрицательного раствора валков, но выходной сигнал сумматора 20 остается равным нулю из-за охвата сумматора 20 отрицательной обратной связью через масштабный преобразователь 21, открытый ключ 22 и интегратор 23. После соприкосновения валков сигнал, пропорциональный сумме давлений, замеряемых левым и правым датчиками 10 и 11 давления, с выхода алгебраического сумматора
12поступает на вход порогового элемента 13. При достижении некоторого суммарного давления (например, 100 т срабатьтается пороговый элемент 13 и Через инвертор 14 запирает ключ 22 При дальнейшем сближении валков на выходе масштабного преобразователя 21 и, соответственно, блока 19 вьщеляется сигнал отрицательного раствор валков, равный полусумме перемещений левого и правого нажимных винтов 3 вниз от момента срабатывания порогового элемента 13.
На выходах алгебраических сумматоров 25 и 26, входы которых соедине-ны с выходами .датчиков 10 и 11 давления, сигналы также отсутствуют из-за того, что эти сумматоры охвачены отрицательными обратными связями через открытые ключи 30 и 31 и интеграторы 28 и 29, соответственно.
При дальнейшем сжатии валков и достижении отрицательньли раствором первого порогового значения, срабатывает пороговый элемент 36 в блоке 35 управления и через инвертор 38 запирает ключи 30 и 31 в блоке 24 согласования характеристик.
Величина первого порогового значения выбирается такой, чтобы при соотв етствующем ему усилии сжатия валков, за счет сплющивания и прогиба валков, а так(;е деформации других элементов клети, валки соприкасалисьпо обеим сторонам бочки при максимально возможном перекосе ненагруженных валков. То есть, к моменту срабатьшания порогового элемента 36 возможный перекос ненагруженных валков устранен за счет деформации упругих элементов клети под действием усилия сжатия.
При дальнейшем сжатии валков на выходах алгебраических сумматоров 25 к 26 начинают выделяться сигналы, пропорциональные изменению давления с левой и правой сторон клети, соответственно, от момента срабатывания порогового элемента 36 и закрывания ключей 30 и 31. Так как перекос валков уже отсутствует, неравенство сигналов на выходах алгебр а-1ческих сумматоров 25 и 26, определяемое алгебраическим сумматором 27, может быть вызвано только неодинаковой крутизно характеристик левого 10 и правого 11 датчиков давления. Сигнал с выхода алгебраического сумматора 27 через открытый ключ 34 поступс1ет на вход интегратора 33, который через блок 32 умножения изменяет коэффициент усиления канала, связанного с правым датчиком 11, до тех пор, пока сигнал на выходе сумматора 27 не станет равным нулю, т.е. пока коэффициент усиления канала правого датчика 11 не установится равным коэффициенту усиления канала левого датчика 10. При дальнейшем сжатии валков и достижени отрицательного раствора, равного второму пороговому значению, срабатывает пороговый элемент 37, через инвертор 39 запирает ключ 34, сбрасывает
О
интеграторы 28 и 29 и подает
логическую i на второй вход элемента 40 совпадения. Величина второго порогового значения выбирается из условия получения заданной точности выравнивания коэффициентов усиления каналов левого и правого датчиков 10 и 11 давления, приведенных к вы- .
0 ходу алгебраического сумматора 27.
После сброса интеграторов 28 и 29 на выходе алгебраического сумматора 27 появляется сигнал, пропорциональный тольк.о перекосу валков. Под
5 действием этого сигнала отпадает нуль-орган 43,на выходе инвертора 42 появляется логическая i ,которая через элемент 41 задержки поступает на третий вход элемента 40 совпадения. Сигнал с выхода элемента 40
0 совпадения открывает ключ 9 и сигнал, пропорциональный перекосу валков, через ключ 9 и алгебраические сумматоры 7 и 8 поступает на входы приводов 1 и 2 левого и правого на5жимных винтов 3, вызывая встречное движение нажимных винтов 3,. направленное на устранение перекоса валков до техпор, пока сигнал на выходе сумматора 27 не станет равным нулю.
0
Однов |еменно с этим сигнал отрицательного раствора валков, поступающий с выхода блока 19 на второй вход алгебраического сумматора 18, компенсирует сигнал эталонного источ5ника 16 и совместное движение нажимных винтов прекращается.
При равенстве нулю сигнала на выходе алгебраического сумматора 27 срабатывает нуль-орган 43, пропадает
0 сигнал на выходе инвертора 42 и с вьщержкой времени пропадает сигнал на выходе элемента 41 задержки и элемента 40 совпадения. Закрывается ключ 9 и процесс установки валков на параллельность заканчивается.
5
Таким образом осуществляется точная установка валков на параллельность независимо от расхождения крутизны характеристик датчиков давления .
0
Формула изобретения
Устройство для установки валков на параллельность прокатной клети,
5 содержащее приводы левого и правого нажимных винтов, соединенных с левым и правым нажимными винтами, входы приводов соединены,соответственно,с выходами первого и второго алгебраических сумматоров, первые входы которых соединены с вьакодом первого ключа, датчики давления с левой и правой сторон клети, выходы которых соединены, соответственно, с первым и вторым входами третьего алгебраич:еско1о сумматора/ выход которого через первый пороговый элемент соеди нен со входом первого инвертора, второй ключ, информационный вход которого соединен с выходом эталонного источника, отличающееся тем, что, с целью увеличения точности установки, в устройство дополнительно введены четвертый алгебраичес кий сумматор, блок выделения отрицательного раствора, содержащий пятый алгебраический сумматор, первый и второй входы которого являются первым и вторьяЛ входами блока выделения отрицательного раствора, выход пятого сумматора соединен со входом масштабного преобразователя, выход кото рого через третий ключ и первый интегратор соединен с третьим вхо,цом пятого cyrviMaTOpa, управляющий вход третьего ключа является третьим входом, а выход масштабного преобразователя является также выходом блока выделения отрицательного раствора, датчики положения левого и IlpaBoro нажимных винтов, блок согласования характеристик датчиков давления, содержащий шестой, седьмой и восьмой алгебраи1еские сумматоры, первые входы шестого и седьмого алгйбраичес ких сумматоров являются первьзп и вто входами блока согласования xapaJi теристик датчиков давления,вторые входы шестого и седьмого алгебраических су /1маторов соедир,ены, соответственно, с выходами рторого и третьего интеграторов, первые входы, которых, через четвертый и пятый ключи соединены, соответственно, с выходами шестого-и седьмого алгебраиче ких сумматоров, выходы шестого и сед мого сумматоров, соединены также с первым и вторым входами восьмого алг браического сумматора, выход седьмог алгебраического сумматора кроме того соединен с первым входом блока умножения, второй вход которого соединен ; выходом четвертого интегратора, вход которого через шестой ключ сое динен с вькодом восьмого алгебраичес кого сумматора, выход блока умножения соединен с третьим входом ЕССЬМО го алгебраического сумматора, выход о которого является также выходом блок согласования характеристик датчиков давления, управляющие входы четверто рЪ -и пято1о кл}очей являются TpeTbUNi входом, сбросовые входы второго и третьего интег-раторов являются четвертым входом, а управляющий вход шестого ключа является пятым входом бдока согласования характеристик дат чиков давления, олок управления, содержащий второй и третий пороговые элементы, входы которых являются первым входом блока управления, выход второго порогового элемента соединен со входом второго инвертора, выход которого является первым выходом блока управления, выход третьего порогового элемента соединен со входом третьего ивертора и вторым входом элемента совпадения, выход третьего порогового элемента является вторым ; а выход третьего инвертора является третьим выходом блока управления, третий вход элемента совпадения через элемент задержки на отпускание и через четвертый инвертор соединен с выходом нуль-органа, вход которого является вторым входом блока управления, первый вход элемента совпадения является третьим входом блеска управления, а выход элемента совпадения является четвертым выходом блока управления, причем вторые входы первого и второго алгебраических сумматоров соединены.с выходом четвертого .алгебраического сумматора, первый вход которого соединен с выходом второго ключа, второй вход четвертого алгебраического сумматора соединен с выходом блока выделения отрицательного раствора и первым входом блока управления, первый и, второй входы блока выделения отрицательного раствора соединены, соответственно, с выходами датчиков положений левого и правого нажимных винтов, третий вход блока выделения отрицательного раствора соединен с выходом первого инвертора, выходы датчиков давления с левой и правой сторон клети соединены, соответственно, с первым и вторым входами блока согласования характеристик датчиков давления, третий, четвертый и пятый входы блока согласования характеристик датчиков давления соединены соответственно,с первым,вторым и третьим выходами блока управления, выход блока согласования характеристик датчиков давления соединен со BTOpbBvi входом блока управления и информационным входом первого ключа, управляющий вход которого соединен с четвертым выходом блока управления, на третий вход которого подают внешнюю команду на установку валков. Источники информации, принятые во внимание при экспертизе 1. Технический отчет № М 24524 ГПИ ТЯЖПРОМЭЛЕКТРОПРОЕКТ Система регулирования нажимными горизонтальных валков . М.,1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования толщины проката | 1980 |
|
SU865459A1 |
| Устройство для регулирования толщины при прокатке концов полос | 1983 |
|
SU1135512A2 |
| Устройство для определения жесткостипОлОСы B пРОцЕССЕ НЕпРЕРыВНОй гОРячЕйпРОКАТКи | 1979 |
|
SU848110A1 |
| Способ управления установкой межклетевого охлаждения полосы в процессе непрерывной горячей прокатки и устройство для его реализации | 1980 |
|
SU1011289A1 |
| Устройство для определения жесткости полосы в процессе непрерывной горячей прокатки | 1981 |
|
SU1028399A1 |
| Устройство для автоматического регулирования толщины проката | 1978 |
|
SU697216A1 |
| Устройство для автоматического регулирования толщины проката | 1981 |
|
SU980890A1 |
| Устройство для автоматического регулирования толщины проката | 1980 |
|
SU876229A2 |
| Устройство для определения наличия металла в валках прокатной клети | 1985 |
|
SU1284632A1 |
| Устройство для регулирования формы полосы при непрерывной прокатке | 1990 |
|
SU1685566A1 |