Изобретение относится к контрольным и регулирующим устройствам прокатных станов, реагирующим на изменение формы полосового проката, и может быть использовано в прокатном производстве черной металлургии.
Целью изобретения является повышение точности регулирования формы полосы и устойчивости прокатки.
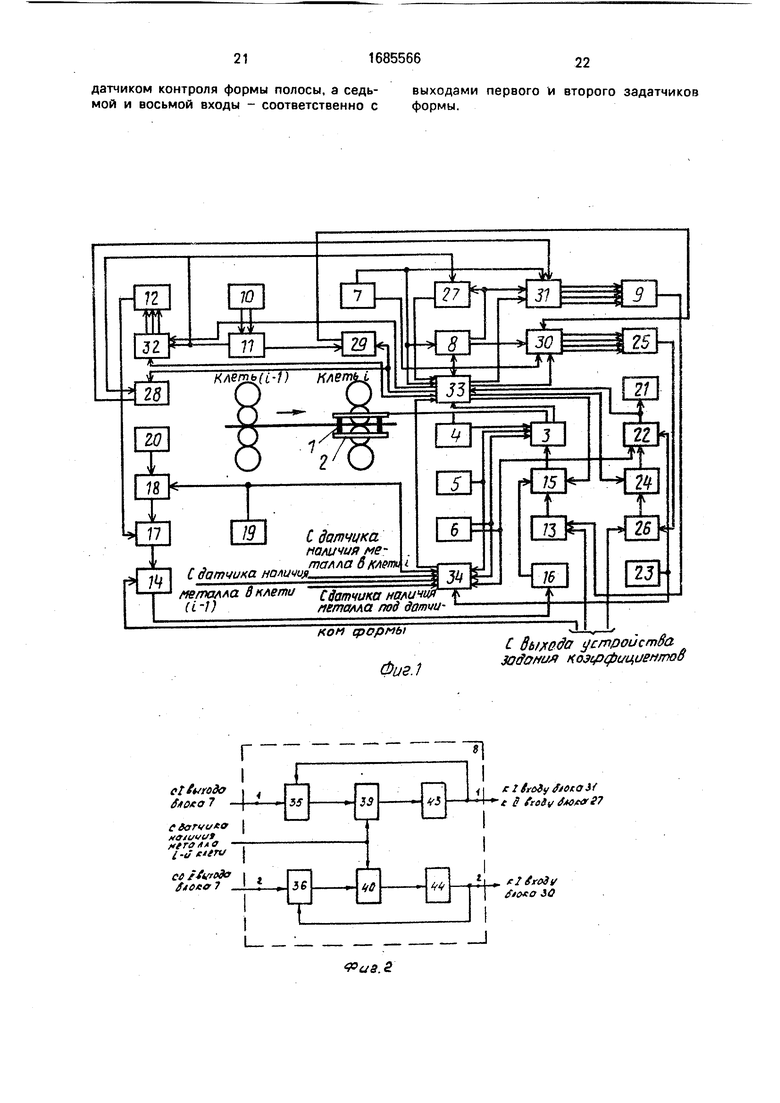
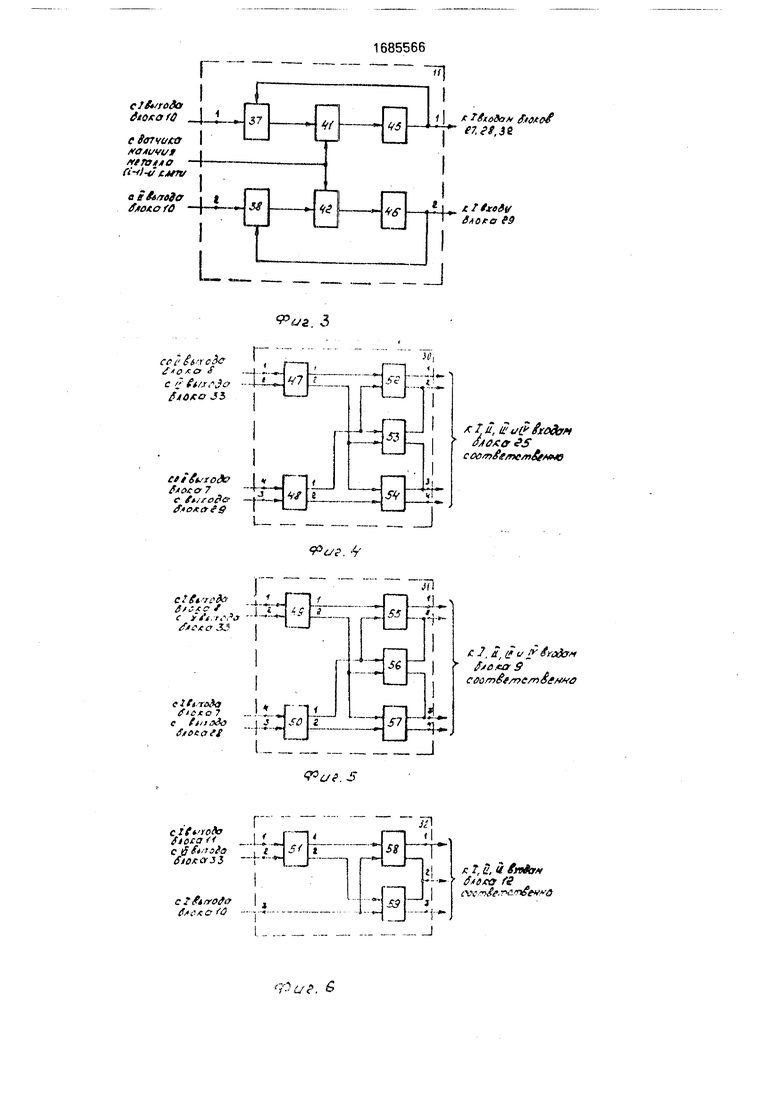
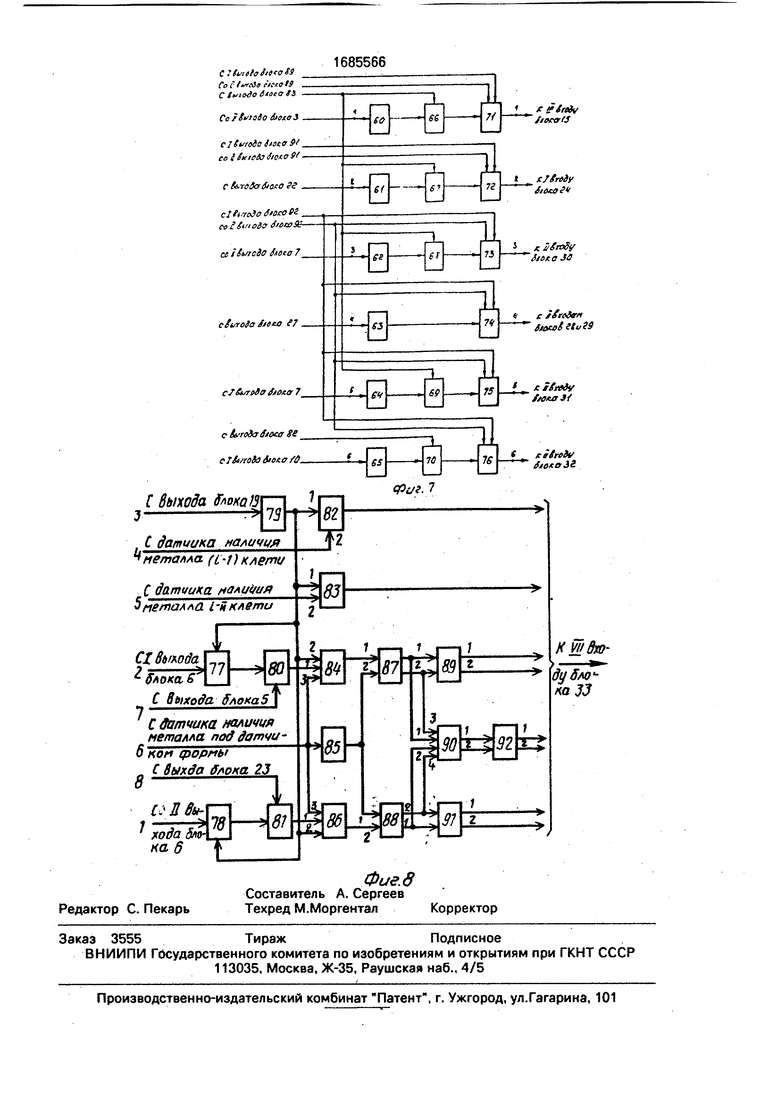
На фиг. 1 приведена болк-схема устройства для регулирования формы полосы при непрерывной прокатке; на фиг. 2 и 3 - блок- схемы структуры блоков задания усилия прокатки (полного усилия прокатки и разноси усилий прокатки с левой и правой сторон полосы) для регулирующей и предыдущей клетей соответственно; на фиг. 4, 5 и 6 - блок-схемы структуры первого, второго и третьего блоков коммутации соответственно; на фиг. 7 и 8 - блок-схемы структуры блоков слежения и управления соответственно.
Устройство для регулирования формы полосы при непрерывной прокатке содержит (фиг. 1) гидроцилиндры 1, соединенные с опорами 2 рабочих валков, электрогидравлический регулятор 3 давления, датчик 4 давления, задатчик 5 формы полосы, датчик 6 контроля формы полосы, первый датчик 7 усилия прокатки, первый блок 8 задания
Os 00
ел ел о о
усилия прокатки и первый сумматор 9, второй датчик 10 усилия прокатки, второй блок 11 задания усилия прокатки и второй сумматор 12, блок 13 и 14 умножения, третий сумматор 15, иневертор 16, блок 17 задержки, блок 18 деления, датчик 19 скорости прокатки в предыдущей клети, блок 20 памяти, привод 21 нажимных винтов и регулятор 22 положения нажимных винтов з регулирующей клети, второй задатч ик 23 форрлы поло- сы, четвертый 24 и пятый 25 сумматоры, второй 26 и третий 27 блоки деления, третий 28 и четвертый 29 блоки умножения, блоки 30-32 коммутации, блок 33 слежений и блок 34 управления.
Выход электрогидразлического регулятора 3 деления соединен с гидроцилиндрами 1 и входом датчика 3 ДЕйленкя, выход которого соединен с первым входом злект- рогидравлического регулятора 3 давления, второй и третий входы которого соединены соответствен но с задатчиком 5 фаг ш полосы и датчиком 6 контроля формь полосы, первый выход датчика 7 усилия прокатки соединен с первым входом блоак 8 задания усилия прокатки, выход сумматора 9 соединен с входом блока 13 умножений, второй вход которого соединен с выходом блока задания коэффициентов (не показано), выход блока 13 умножения соединен с первым входом сумматора 15, второй вход которого через инвертор 16 соединен с выходом блока 14 умножения, первый {(ход которого соединен с выходом блока 17 задержки, первый выход датчика 10 усилия прокатки соединен с первым входом блока 11 задания усилия прокатки, выход сумматора 12 соединен с первом входам блока 17 задержки, второй вход которого соединен с выходом блока 18 делений, первый вход которого соединен с датчиком 19 скорости прокатки в предыдущей клети, а второй вход - с выходом блока 20 памяти, а выход сумматора 15 соединен с четвертым входом электрогидравлического регулятора 3 дав- ления, второй выход которого соединен с первым входом блока 33 слежения, выход регулятора 22 положения нажимных винтов соединен с вторым входом блока 33 слежения и с входом привода 21 нажимных вин- тов, выход задатчика ИЗ формы полосы соединен с первым входом регулятора 22 положения нажимных винтов, втором вход которого и первый вход блока 34 управления соединены с вторым выходом датчика 6 контроля формы, третий вход регулятора 22 положения нажимных винтов соединен с выходом сумматора 24, первый вход которого соединен с вторым выходом блока 33 слежения, а второй вход его соединен с выходом блока 26 деления, первый вход которого соединен с выходом устройства задания коэффициентов, второй вход блока 26 деления соединен с выходом сумматора 25, первый, второй, третий и четвертый входы которого соединены соответственно с первым, вторым, третьим и четвертым выходами блока 30 коммутации, первый вход которого соединен с вторым выходом блока 8 задания усилий прокатки, второй вход блока 30 коммутации соединен с третьим выходом блока 33 слежения, третий вход блока 30 коммутации соединен с выходом блока 29 умножения, четвертый вход блока 30 коммутации, второй вход блока 8 задания усилия прокатки и третий вход блока 33 слежения соединены с вторым выходом датчика 7 усилия прокатки, первый вход блока 28 умножения, первый вход блока 32 коммутации, первый вход блока 27 деления соединены с первым выходом блока 11 задания усилия прокатки, второй вход блока 23 умножения и второй вход блока 29 умножения соединены с четвертым выходом блока 33 слежения, шестой выход которого соединен с вторым входом блока 32 коммутации, третий вход которого соединен с первым выходом датчика 10 усилия прокатки, первый, второй и третий выходы блока 32 коммутации соединены соответственно с первым, вторым и третьим входами сумматора 12, второй выход датчика 10 усилия прокатки соединен с вторым входом блока 11 задания усилия прокатки, второй выход которого со- еднен с первым входом блока 29 умножения, первый вход блока 31 коммутации и второй вход блока 27 деления соединены с первым выходом блока 8 задания усилия прокатки, второй вход блока 31 коммутации соединен с пятым выходом блока 33 слежения, третий вход блока 31 коммутации соединен с выходом блока 28 умножения, четвертый вход блока 31 коммутации соединен с первым выходом датчика 7 усилия прокатки, первый, второй, третий и четвертый выходы блока 31 коммутации соединены соответственное с первым, вторым, третьим и четвертым входами сумматора 9, первый выход блока 33 сдежения соединен с третьим входом сумматора 15, четвертый вход блокз 33 слежения соединен с выходом блока 27 деления, пятый и шестой входы блока 33 слежения соединены с первыми выходами соответственно датчиков 7 и 10 усилия прокатки, седьмой вход блока 33 слежения соединен с выходом блока 34 управления, второй вход которого соединен с первым выходов датчика б контроля формы полосы, третий вход блока 34 управления соединен с выходом датчика 1S скорости
прокатки предыдущей клети, четвертый, пятый и шестой входы блока 34 управления соединены соответственно с выходами датчиков контроля наличия металла в предыдущей клети (не показаны), регулирующей клети и под датчиком контроля формы полосы, а седи/юй и восьмой входы блока 34 управления соединены соответственно с выходами задатчиков 5 и 23 формы.
Блоки 8 и 11 задания усилия прокатки предназначены для определений и запоминания суммарного значения усилия прокатки и разности усилий с левой и правой суорон полосы при прокатке головного участка полосы в клетях { -1}-й и -й соответственно (заданных значений суммарного усилия и разности усилий).
Каждый блок заданий усилий прокатки имеет два канала и состоит из сумматоров 35-38, ключей 39-42, интеграторов 43-46 (фиг. 2 и 3).
С целью упрощения связь ключей 39-42 с датчиками наличия металла в 1-1 и (М)-й клетях на фиг. 1 не показаны.
Блоки 30-32 коммутации предназначены для переключения сигналов, пропорциональных суммарным усилиям прокатки и разности усилий прокатки с левой и правой сторон полосы и поступающих на входы сумматоров 9, 12 и 25 в последовательности, соответствующей алгоритму компенсации симметричной и асимметричной составляющих неплоскостности.
Каждый блок коммутации состоит из управляемых ключей 47-51 и элементов И с открытым коллектором 52-59 (фиг. 4-6),
Каждый из управляемых ключей двухка- нальный и одновременно пропускает по соответствующему каналу только один из входных сигналов, а зависимости от его приоритетности. При отсутствии приоритетных сигналов ключи пропускают неприоритетные сигналы.
При поступлении приоритетного сигнала ключ переключается, закрывая при этом канал неприоритетного сигнала и открывая канал приоритетного сигнала.
Приоритетными каналами Вход блока - выход ключа ключей 47-51 являются каналы 2-2,4-1,2-2,4-1 и 2-2 соответственно.
Блок 33 слежения предназначен для слежения за параметрами прокатки: усилиями Pi-1, PI прокатки в П-1)-й и 1-й клетях,
разностьюА Pfп усилий прокатки с левой и правой сторон полосы в 1-й клети, приращением AQi усилия противоизгиба рабочих валков в 1-й клети, коррекцией ASj положения нажимных винтов в 1-й клети на участках
полосы, а также запоминание сигналов, пропорциональных указанным параметрам,
и коэффициента Ко отношения усилий прокатки в i-й и (1-1)-й клетях при прокатке го- 5 ловной части полосы при достижении равенства фактического и заданного значений симметричной асимметричной А (составляющих дефектов формы полосы.
0Блок 33 слежения состоит и аналоговоцифровыхпреобразователей 60-65. сдвиговых регистров 66-70. преобразователей 71-75 код-аналог с памятью (. 7). В сдвиговых регистрах производится сдаигинфор5 мации из регистр 0 в регистр - слежение за параметрами прлкатки и нз участках полосы, с момента входа полосы в (Ы)-ю и i-ю клети / дс момент з, когдг отслеживаем ь-м участок полосы доходит до датчи0 ка контроля форг.-ы полосы, Если, на данном участке полосы достигнуты заданные показатели формы, то указанные параметры запоминаются в памяти соответствующего преобразователя код-аналог и используют5 ся при прокатке следующей полосы для упреждающей коррекции величины гидроизгиба рабочих валков, а также для определения текущего значения коррекции управляющих воздействие по д/.иие поло0 сы. В противном случае информация об ука- заь;-.ых параметрах прокатки на данном участке кполосы сбрасывается. Процесс слежения повторяется при прокатке следующей полосы.
5Блок 34 управления предназначен для
выработки управляющих импульсов записи информации с параметрах прокатки в сдвиговые регистры и преобразователи код-ана-- лог, а также для выдачи информации из
0 преобразователей код-аналог блока слежения.
Блок 34 управления состоит из интеграторов 77 и 78, счетчика 79 импульсов, вырабатывающего импульс записи информации
5 в сдвиговые регистры 66-70 5;;ока слежения, компараторов 80 и 81, дву: -ходовых элементов И 82 и 83, трехвходового элемента И 84, элемента НЕ 85, второго трех с ходового элемента И 86, триггеров 87 и 88, ключей 89,
0 91, 92, формирующих кратковременные импульсы записи и выдачи информации в преобразователях 72-76 код-аналог блока 33 слежения и сдвоенного двухвходового элементе: И 90, Для упрощения на фиг. 1 выходы
5 блока 31 управления объединены в один канат (фиг. 8).
В предлагаемом устройстве для регулирования формы полосы привод 21 положения нажимных винтов и регулятор 22
положения нажимных винтов могут быть, реализованы на стандартных элементах технических средств для яокальчых информационно-управляющих систем (КТС ЛИУС), входящих в состав Государственной системы приборов.
Устройство для регулирования формы полосы работает следующим образом.
До начала прока гки так же, как в прототипе, на второй вход блока 13 умножения вводится информация о передаточном коэффициенте к|з|, связывающем изменение
усилия A Of прогивоизшба рабочих еалков клети 1 с изменением усилия APi прокатки в этой же клети, а ни второй вход блока 14 умножения вводится информация о передаточном коэффициенте , связывающем
изменение усилия Л Or 1 противоыогиба рабочих валков клети с изменением усилия ДРи в предыдущей ьлети.
Значения пере/згпочных коэ .Ьщшнтов K&i и зависят от соотношение жесткости валковой системы М§ (при действии
усилия противоизгиба) я М§ (при деистами усилия прокатки)
Дополнительно на первый вход блока 26 деления вводится коэффицеиент, пропорциональный жесткости клети Ш.
На второй вход регулятора 3 давления гидроизгиба с выходе первого задатчша S формы вводится сигнал, пропорциональный заданному (допустимому) значению симметричной составляющей отклонения формы полосы от плоской.
На первый вход регулятора 22 положения нажимных винтов с выхода за датчика 23 формы вводится сигнал, пропорциональный заданному (допустимому) значению асимметричной составляющей отклонений формы полосы от плоской.
После входа первой полосы а ( клеть с первого выхода датчика 10 усилия прокатки на первый вход блока о11 задания усилия прокатки, на третий вход блока 32 коммутации и на шестой аход блока 33 слежения поступает сигнал, пропорциональный усилию прокатка в ( оклети.
С второго выхода датчика 10 усилия прокатки на второй ыход блока 11 задания усилия прокатки поступает сигнал, пропорциональный разности усилий прокатки с левой и правой сторон полосы в (Ы}-й клети,
Аналогично поело входа первой полосы в -ю клеть с первого выхода датчика 7 уем- лия прокатки на первый эход блока 8 задания усилия прокгтки, на пятый вход блока 33 слежения и на четвертой вход блока 31
коммутации подается сигнал, пропоруио- нальный усилию прокатки в 1-й клети. С второго выхода блока 7 усилия прокатки на второй вход блока 8 задания усилия прокатки, на четвертый вход блока 30 коммутации, на тре гий выход блока 33 слежения поступает сигнал, пропорциональный разности усилий прокатки с левой и правой сторон полосы в 1-й клети,
0 При прокатке головного участка полосы в предыдущей и регулирующей клетях в блоках 11 и 8 задания усшшя прокатки определяются м запоминаются значения полного усилия прокатки Р(и)з, , разности усилий
АР(|-ч)з РГэПрокатки с левой и правой сторон полосы, яеляющиегя заданными значениями для прокаты ваерлой полосы и заданного режима прокатки. При прокатке 0 последующих полос значения Р(м)3, Pia.
пл
A Pf i)3 и РРз определяются заново.
Сигнал, пропорциональный Р(ы)з, с
первого выхода блока 11 задания усилия
5 прокатки поступает на первые входы блоков
27, 28 vt 32 деления, умножения и коммутапл
ции соответственно. Сигнал AP()3c второго выхода блока 11 поступиает на пер0 вый вход блока 29 умножения.
Сигнал, пропорциональный Р|3, с первого выхода блока 8 задания усилия прокатки поступает на второй вход блока 27 деления и на первый вход блока 31 коммутации.
g В блоке 27 деления по значениям Р{ы)э и Распределяется коэффициент отношения усилий прокатки в (М)-й и 1-й клетях
к р}3 Plpp
0 Сигнал, пропорциональный коэффициенту Ко, поступает на четвертый вход блока 33 слежения.
Сигнал, пропорциональный ДРС3П. с второго выхода блока 8 поступает на первый
5 вход блока 30 коммутации.
При прокатке основной части полосы сигнал Pit, пропорциональный текущему значению усилия прокатки в регулирующей клети, с первого выхода датчика 7 усилия
O прокатки поступает на четвертый вход блока 31 коммутации, а сигнал Рю, пропорциональный заданному значению усилия прокатки в гой же клети, с первого выхода блока 8 задания усилия прокэтки поступает
5 из первый вход блока 31 коммутации.
В блокеп 31 коммутации открываются канал 1 -1 ключа 49 и «санал 4- ключа 50, по которым сигналы Pir и Р, 3 поступают ча входы элемента V 55, который открывается и
пропускает сигналы Р|Т и Р|3 на первый и второй входы сумматора 9. В сумматоре 9 определяется отклонение Д Pi усилия прокатки от заданного значения при прокатке основной части полосы
Д Pi Pir - Р|з.
При отклонении текущего значения усилия прок.с;, ки от заданного значения, вызванного, нагтр чер. изменением жесткости полгсь, ск-гнал, пропорциональный отклонению Л PI усилия прокалки, с выхода сумматора G поступает на первый вход блока 13 умножения, где умножается
. а коэффициент) и поступает па первый вход сумматора 15. С выхода сумматора 15 сигнал задания ALf на изменение усилия прот воизгиба рабочих валков поступает на четвертый вход злектрогидравл ч ского ре- гуятора 3, который изменяет усилие проти- воизгиба на величину
, K51.
Аналогично рассмотренному г;ри прокатке основной части полосы сигнал Д Pfnn, пропорциональный текущему значению разности усилий прокатки с левой и правой сторон полосы в регулирующей клети, с второго выхода датчика 7 усилия прокатки поступает нз четвертый вход С;,ока 30 коммутации, На первый вход блока 30 коммутации с второго выхода блока 8 задания
усилия прокатки поступает сигнал APf3n, пропорциональный заданному значению разности усилий прокатки с левой и правой сторон полосы.
В блоке 30 коммутации открываются каналы 1-1 ключа 47 и канала 4-1 ключа 48, по
которым сигналы ДРгг и APfs поступают на входы элемента И 52, который открываетсяипропускает
сигналыД PIT I, APfb на первый и второй входы сумматора 25,
В сумматоре 25 определяется отклонение д Pf п разности усилий прокатки с левой и правой сторон полосы от заданного (настроечного) значения, при котором отсутствуют несимметричные дефекты формы полосы
5РГ ДРРТП-ДРГРП.
Сигнал, пропорциональный отклонению д Pf разности усилий прокатки с левой и правой сторон полосы, с выхода сумматора 25 поступает нэ зторой вход блока 26 деления, где делится на коэффициент, пропорциональный жесткости клети М, с выхода блока 26 деления поступает на второй вход сумматора 24. С выхода последнего сигнал, пропорциональный заданию ASi на изменение поло жения нажимных винтов 1-й клети, поступает на третий вход регулятора 22 положения нажимных винтов, кото- 5 рый изменяет положение нажимных винтов и к -нпекснрубт несимметричные дефекты фг-ому
s то
10 производится регулирование усилий гсотивоизгиба вглков в i-й клети по величине отклонения усилим прокатки в(Ы)-й клети от заданного значения. Для этого сигнала, .-рогорционзльный текущему зна5 чению усилия °(м)т прокатки в (Ы)-й клети, с первою ь хода датчике 10 усилия прокатки поступает нз вход блока 32 коммутации, .: сь:гка, пропорциог РЛЬНЫЙ заданному значению Pi ;)3 усилия прокатки
0 в той же КЛУТИ, с первого зыходь блока 11 задания усилия прокатки поступает на первый зход блока 32 коммутации.
В блоке 32 коммутации открывается канал 1-41 ключа 51 и сигнзл, пропорционапь5 ный заданному значению усилия прокатки в (Ы)-й клети поступает на вход элемента И 58, на гторой вход которого с первого выхода датчика 10 усилия прокатки в(1-1)-й клети постугсют сигнал, пропорциональный т ч-у0 щему значению Р(1-1)т усил(Я прокатки в (V 1)-Г: кг;ети. Элемент И 58 открываете и пропускает сигналы Р(|-1)т и Р(ы)з на первый и второй входы сумматора 12. В сумматоре 12 определяется отклонение ДРи усилия
5 прокатки от заданного значения при про- катче oci GBHoii части полосы Д Рм P{i-i)r- Р(|-)г Сигнал, пропорциональный отклонению A F(i- . усилия прокатки, с выхода сум0 матора 2 поступает на первый вход блока 17 задержки, с выхода которого после задержки ча зремч, времени прохождения гюлосы расстояния от клети (1-1) дс клети i, поступает на первый вход блока 14
5 умножения, где умножается на коэффициентКЁГ1,
С выхода блока 14 умножения сигнал ДСТ 1 задания, пропорциональный произ0 ведению АР|-1 К&,1, через инвертор 16 поступает нз второй вход сумматора 15, где суммиоувтся с сигналом, корректирующим усилие противоизгиба рабочих валкоз в функции отклонения A Pi усилия прокатки в
5 1-й к.., поступающим на первый вход сумма гора ib. С выхода сумматора 15 суммарный сигнал задания на изменение усилия протиьоизгмба рабочих валков поступает на
четчергь,/ нход злектрогидравлического регулятора 3, который изменяет усилие проти- воизгиба рабочих валков и компенсирует симметричные дефекты формы при изменении усилия прокатки в (1-1)-й и 1-1 клетях
AQ AQr -AQr 1 APi K&,-
-AP.-I ка-1
Регулирование симметричной составляющей АФс формы полосы производится по отклонению ее от заданного значения, Регу- лирование производится по сигналу с датчика 6 формы, пропорциональному текущему значению симметричной составляющей отклонений формы полосы от плоской, и по сигналу с задатчика 5 формы, пропорциональному заданному значению симметричной составляющей отклонения формы,
В устройстве производится регулирование ассиметрмчной составляющей Д% формы полосы по отклонению ее от заданного значения. Регулирование п река водится по сигналам с датчика 6 эрмы и задатчика 23 формы, пропорциональному текущему и заданномуДФаэ значе- ниям асимметричной составляющей отклонения формы полосы от плоской соответственно. При прокатке полосы указанные сигналы поступают на второй и пер- вый входы регулятора 22 положения нажимных винтов, где после к сравнении аналогично регулированию симметричной составляющей отклонению формы формируется управляющий сигнал, который через при вод 21 нажимных винтов 1-й клети изме- няет положение последний, компенсируя при этом асимметричную составляющую отклонения формы полосы от заданного значения.
Одновременно управляющие сигнале на изменение усилия иротивоизгиба рабочих валков и положении нажимных винтов с второго выхода регулятора 3 давления гидроизгиба валков и с: выхода регулятора 22 положения нажимных аинтов поступают на первый и второй входы блока 33 слеживания соответственно.
Таким образом, при прркатке основной части первой полосы регулировние формы полосы в 1-й клети производится по следую- щим параметрам; регулирование симметричной составляющей A Jk no отклонению усилия прокатки от изданного значения ДРм и АР) в (1-1)-й клети и i-й клетях и по отклонению ДФЬ симметричной составлн- ющей формы от заданного значения путем изменения усилия прогивоизгиба в i-й (слети; регулирование ассмметричной составляющей ДФь по оазиоетм APf усилий прокатки с левой и правой сторон полош-к
по отклонению А 4% асимметричной составляющей формы от заданного значения
путем изменения положения нажимных винтоа в i-й клети.
При регулировании формы первой полосы по указанным параметрам на первый, второй, третий, четвертый, пятый и шестой входы блока 33 слежения (на входы аналого- цифровых преобразователей 60-65) поступают , пропорциональные приращению AQi усилия противоизгиба рабочих валков, величине коррекции A Si положения нажимных винтов, разности
усилий Д РР прокагки о левой и правой сторон полосы в клети, коэффициенту К0 отношения усилий прокатки в i-й и (1-1 )-й клети, усилиям Р(; ij / Р прог.атки в (1-1)-й и 1-й клетях (фиг. 1, 7).
В аналого-цифровь х преобразователях 60-65 блока 33 слежения указанная информация преобразуется в цифровую форму и поступает на информационные входы сдвиговых регистров 66-70. На управляющие входы данных регистров с выходов элементов И 82 и 83 блока 34 управления поступают импупьсы записи информации (фиг. 1 и 8), Импульсы записи формируются в счетчике 79 импульсов по сигналам, поступающим с датчика 9 скорости (М)-й клети на третий вход блока 34 управления. Период следования импульсов устанавливается пропорционально выбранной длине участка усреднения полосы. Импульсы записи с выхода счетчика 79 поступают на входы элементов И 82 и 83, на вторые входы которых поступают сигналы наличия металла в (1-1 )-й и i-й клетях. При наличии полосы в (М)-й и -й клетях счетные импульсы с выходов элементов И 82 и 83 поступают на управляющие входы сдвиговых регистров 66-70 блока слежения (фиг, 1, 7), в которых запи- еыва&те м сдвигается информация о значении параметров AQi, ASi, APf , Ко, Рц, Pi на участке полосы, определяемом заданным в счетмиче 79 импульсов времени следования импульсов.
Пш регулировании формыф полосы сигналы, пропорциональные симметричной АФс к асимметричной составляющим отклонения формы полосы от заданного значения, с первого и пторого выходов датчика 6 формы поступает на второй я первый входы блока 3 управления,
В блоке 34 управлений указанные сигналы поступают на входы интеграторе,: 77 и 78 (фиг. 1 и 8), в которых усоедняготся за ty, определяемое уста шолзнчой периодичностью управляющих импульсов, поступающих с выхода счетчика 79 импульсов.
Усредненные значения сигналов, пропорциональные значениям АФс и А Фа , поступают для сравнения на входы инверсных компараторов 80 и 81, на вторые входы которых с выходов задатчиков 5 и 23 формы поступают сигналы, пропорциональные заданным значениям симметричной АФСЗ и асимметричной АФСЗ составляющих отклонения полосы от плоской формы соответственно. Если разница (ДФс-ДФсз) или (А Фа - А Фаз) равна нулю (точнее порогу срабатывания компаратора), то срабатывает один из компараторов (или одновременно оба) и с их выходов на один из входов одного или двух элементов И 84 и 86 поступает сигнал, соответствующий логической 1. На вторые входы элементов И 84 и 86 с выхода счетчика 79 импульсов поступают управляющие импульсы заданной периодичности. На третьи входы элементов И 84 и 86 поступает сигнал наличия металла под датчиком формы.
Таким образом, если при регулировании формы достигается равенство фактических (АФс.АФаи заданных АФсз . ДФзз значений составляющих формы то на выходе элементов И 84 и 86 (на одном или двух одновременно) появляется логический сигнал 1 и в выхода элемента НЕ 85 поступает инверсный (О) логический сигнал наличия металла под датчиком формы. Триггеры 87 или 88 (или одновременно оба) переключаются в одно из устойчивых состояний, при котором на первом выходе каждого триггера сигнал соответствует 1, а на втором выходе - О. При таком сочетании сигналов на время t3, достаточное для записи информации, срабатывает ключ 89 или 91 (или оба одновременно) и на первых их выходах появляются импульсы Запись. Если достигается равенство заданным значениям одновременно симметричной АФС и асимметричной АФа составляющих формы, то переключаются оба триггеры 87 и 88 и на их первых выходах появляются сигналы Г, которые поступают на первый и второй входы одного из сдвоенного двухвходового элемента И 90. На первом выходе последнего появляется сигнал 1, а на втором выходе- О.
Аналогично рассмотренному на время t3 срабатывает ключ 92, на первом выходе которого появляется сигнал Запись.
С первых выходов ключей 89, 91 и 92 сигналы Запись поступают на входы Запись преобразователей 71-76, код-аналог, в которых соответственно запоминаются
значения параметров A Qio, ASioAPfo1, K0, Pio и Р(м)о, соответствующие участкам поло0
5
0
5
0
5
0
5
0
5
сы, на которых достигнуто равенство симметричной АФс или асиммпетричноАФа (или одновременно обоих) составляющих формы полосы соответствующим заданным значениям АФсз и А Фаз После выхода полосы из-под датчика 6 формы полосы на выходах компараторов 80 и 81 появляется сигнал, соответствующий логическому О, На выходах трехвходовых элементов И 84 и 86 также появляется сигнал О, а на выходе элемента НЕ 85 - сигнал Г. Триггеры 87 и 88 переключаются во второе устойчивое состояние, при котором на их первых выходах появляется сигнал О, а вторых-сигнал 1. На третий и четвертый входы сдвоенного элемента И 90 поступает сигнал 1, который открывает второй элемент И. На втором выходе элемента И 90 появляется сигнал 1, а на первом - О. Нз первых входах ключей 89, 91 и 92 появляется сигнал О, а на вторых - сигнал 1. Ключи срабатывают и на их вторых выходах появляются импульсные сигналы Выдача, а на первых выходах - сигнал - О.
С вторых выходов ключей 89, 91 и 92 сигналы Выдача поступают на входы Выдача преобразователей 71-76 код-аналог, с первого, второго, третьего, четвертого, пятого и шестого выходов которого на ывходы блока 15, 24, 30, 28, 29. 31 и 32 поступают сигналы, пропорциональные соответственно значениям заданий AQ|0, ASio на изменение усилия противоизгиба рабочих валков и положения нажимных винтов, разности A Pf0n усилий прокатки с левой и правой сторон полосы, коэффициента Ко отношения усилий прокатки в 1-й и (М)-й улетях, усилия PJO и Р(и) прокатки в 1-й и (Ы)-й клетях, на участке полосы, на котором текущие значения симметричной ДФс и асимметричной АФа составляющих отклонения формы полосы равны (одна из них или обе вместе) заданным значениям АФсз и А Фаз . соответственно. Для краткости будет называть параметпы Д Qio, ASio,
Ко, Pio, Р(И)о оптимальными.
В блокам 30-32 коммутации сигналы, пропорциональные оптимальным значениям Pfo, Pio, P(i-i)o, поступают на приоритетные входы ключей 47, 49 и 51 соответственно и используются в качестве заданных значений при регулировании формы полосы на второй полосе (фиг. 4-6).
Оптимальные значения коррекции A Cho противоизгиба рабочих валков и положения AS.o нажимных винтов используются для регулирования формы полосы по прогнозу при прокатке второй полосы.
Коэффициент Ко используется для расчета прогнозируемых усилий прокатки при прокатке последующей полосы. Для этот после выхода полосы из-под датчика контроля формы полосы на третий вход сум.иа- тора 15с первого выхода блока 33 слежения поступает сигнал, пропорциональный оптимальной величине кэррзкции AQio, с второго выхода блока 33 на первый вход сумматора 24 поступает сигнал, пропорциональный оптимальней иеличине коррекции ASio,
После входа второй полосы в П-1)-ад клеть во втором блоке 11 задания усилия прокатки определяются значения /силия Р(,- лп
1)3 и разности А Р л - Л s прохати с левом и правой сторон на головной части полосы.
С первого выхода второго бцока 11 задания усилия прокатки сигнал, пропорциональный значению усилии Р(и}3 прокатки на головной части полосы, поступок i-ы первый вход блока 28 умножения, а , aiopuio выхода блока 11 сигнал, проморцмоналы.ый разности усилий прокат ки с левой и правой сторон полосы, поступает на первый вход блока 29 умножения. На вторые входы блоков 28 и 29 умножения с четвертого выхода блока 33 слежения поступает оптимальнее
значение коэффициента Ко отношения. В блоках 28 и 29 умножения определяются прогнозируемые значения усилия Pin прокатки и разности усилий АРГпп - левой с правой сторон (на головной части второе полосы) до входа ее в Но клеть Pin Р(1-1)з К0;
лп
АРГпП ДР(|-Г)3 Ко.
Сигналы, пропорциональные прогнозируемым значениям Р|П и А РСПП, поступают на третий вход ключей 0 и 48 в бпоках 31 и 30 коммутации соответственно (фиг, 4 и 15), Ключи открываются и пропускают указанные сигналы на входы элементов И 5/ и 54 соответственно, на вторые входы которых с выходов ключей 49 и 47 поступают оптимальные значения Р|0 и А Иопсоответствен- но. Элементы -И 57 и 54 открываются и
пропускают сигналы Pin. Р,о и ДРРлп , APfc1 на четвертый и третий эходы сумматоров 9 и 25, в которых определяется разность соответственно
APln Pin - Plo;
бРГпп ДРРпв-ДРП0л.
Сигнал, пропордионзльный APin, поступает на первый вход блока 13 умножения, где умножается нл коэффициент KQI
где
КЙ АОГ
задание на корректировку усилил пропаоизгиОз рабочих взлков по про- гнозируеиому отклоненмю усилий прокатки на головкой части ПОЛОСУ з 1-1 клети от оптимального значения.
Сигнал, пропорциональный ACfln. поступает ча пеовый вход сумматора 15.
.«-I
Сигнал, пропорциональный д РРПП, поступает кз второй вход блока 25 деления, где делится на коэффициент, пропорциональный жесткости клети Mk
ДЗГ-apf,
Д5Г - зэцание на корректисозку положения нажимных винтов . о прогнозируемо разности усь1/)Ий проуа гим с r павой Q сторон поло., на голозиой части поле or-1 в 1-й клети от оптимального значения.
Сигнал, гфо 1орционз/8зный , по- гтупаег на впрой вход сумматоре 24.
После °УСДЗ второй полосы э (-1)-ю 5 сигнал, пропорциональный текущему знаиечию усилия Р(м)т прокатки, поступает на третий вход блока 32 коммутации, а сигнал, пропорциональный Р(ы)о, - на его второй вход (фиг. 1,6), В кшоче 51 открывается 0 приоритетный канал 2-2 и сигнал Р(ы)о поступает на один из входов элемента И 59, на второй вход которого (третий вход блока 32) поступает сигнал Р{м)т.
Сигналы Р(-1)оИ Р(|-1)т поступают на второй и третий зходы сумматора 12 ts, котором определяется отклонение усилия прокатки от оптимального значения
ДР(|-1) Р(1-1),--Р(1-1Ь
Сигнал, пропорциональный ДР(|-1). так же, как при регулировании на первой полосе, через блок 17 задержки поступает на ивовый вход блока 14 уг ножения, где умножается на коэффициент , к через инвертор 16 поступает на второй вход сумматора 15
АОГ --1 АР(1) ка-1,
тзким образом, после входа полосы в (1-1)-ю клеть и до входа ее в 1-ю клеть произ- 0 водится упреждающее реп/лирование профиля активной образующей валков путем изменения следующих пара.летооа: корректировки положения нажимных винтов
ASy - A Sio +Д5Р,
° где ASy - упреждающая коррекция положения нажимных винтое,
A Sio - оптимальнор знз .ение кирреч- ции, полученное пр.. рег.-л ованги нг предыдущей полосе;
5
0
6
AST - прогнозируемое значение коррекции на головной части второй полосы, и корректировки усилия противоизгиба рабочих валков
доу Асэ1+дсРп+доР|-1о1
где AQy - упреждающая суммарная коррекция противоизгиба рабочих валков;
A Qio - оптимальное значение коррекции, полученное при регулировании на предыдущей полосе;
AQ| n -прогнозируемое значение коррекции на головной части второй полосы;
значение коррекции в функ- ции отклонения на головной части второй полосы.
Упреждающая коррекция формы производится с учетом прогнозируемой жесткости полосы и позволяет свести к минимуму отклонения формы на головной части полосы.
При прокатке последующей части второй полосы в (Ы)-й клети аналогично рассмотренному производится корректировка усилия противоизгиба валков в 1-й клети (регулирование симметричной -составляющей формы) по отклонению А Рм усилия прокатки в (1-1 )-й клети от оптимального значения.
При прокатке головкой части второй полосы в 1-й клети, так же как на первой полосе в блоке 8 задания усилия прокатки, определяется и запоминается значение усилия Р|3
и разности усилий А РРзп прокатки с левой и правой сторон полосы.
Далее по значениям Р{и)з и Р|3 в блоке 27 деления определяется коэффициент К0 отношения усилий прокатки в (1-1}-й и 1-й клетях, который используется для определения прогнозируемого значения усилия и разности усилий прокатки для третьей полосы.
При прокатке основной части второй полосы в 1-й клети определяются теущие значения усилия PIT и разности усилий A FV прокатки с левой и правой сторон полосы, которые поступают на четвертые входы блоков 31 и 30 коммутации соответственно. В блоках 31 и 30 коммутации приоритетные каналы 4-1 ключей 50 и 48 открываются, а каналы 3-3 прогнозируемых значений Р|П и
A Pfn1 закрываются. По каналам 4-1 текущие
значения Р|Т и ДРГт поступают на входы элементов И 57 и 54, соответственно не вторые входы которых поступают оптимальные
значения Р|0 и A Pfn1. Аналогично регулированию по прогнозу по отклонениям Pin и
5
JQ
0
5
0
5
0
5
0
5
A Pfnn от оптимальных значений определяются задание на корректировку усилия противоизгиба рабочих валков и положения нажимных винтов.
Далее аналогично рассмотренному на последующей части полосы производится регулирование симметричной АФь и асимметричной A 4fe составляющих формы по от- клонению усилий А Р 1АР| и разности
усилий д РГп прокатки от оптимальных значений, а также по отклонению формы от заданных значений симметричной асимметричной Афэ составляющих.
Таким образом, наличие в предлагаемом устройстве привода нажимных винтов, регулятора положения нажимных винтов регулирующей клетм, второго задэтчика формы полосы, двух дополнительных сумматоров, двух дополнительных блоков деле- ния, двух дополнительных блоков умножения, трех блоков коммутации блока деления, блока управления и их связей с остальными элементами схемы позволит повысить точность регулирования формы полосы и устойчивость прокатки за счет регулирования асимметричной составляющей по отклонению разности усилий прокатки по краям полосы и отклонению асимметричной составляющей, измеренной на выходе из последней клети стана, от заданных значений, регулирования усилия противоизгиба рабочих валков и положения нажимных винтов по прогнозу с использованием параметров предыдущей клети, упреждающей коррекции противоизгиба рабочих валков и положения нажимных винтов после достижения заданных показателей формы на предыдущей полосе, а также корректировки заданных значений усилия и разности усилий прокатки по краям полосы после достижения заданных показателей формы полосы.
Формула изобретения Устройство для регулирования формы полосы при непрерывной прокатке, содержащее гидроцилиндры,соединенные с опорами рабочих валков регулирующей клети, электрогидравлический регулятор давления, датчик давления, задатчик формы полосы, датчик контроля формы полосы, первый датчик усилия прокатки, первый блок задания усилия прокатки и первый сумматор, второй датчик усилия прокатки, второй блок задания усилия прокатки и второй сумматор, два блока умножения, третий сумматор, инвертор, блок задержки, блок деления, датчик скорости прокатки предыдущей клети и блок памяти, причем выход электрогид- равлического регулятора давления
соединен с гидроцилиндрами и входом дат чика давления, выход которого соединен с первым входом идравлического р гулятора давления, второй и третий входь1 которого соединены соответственно с зя- датчиком формы попосы и датчиком контроля формы полосы, первый выход первого датчика усилия прокатки соединен с первым входом первого блока задания усилия прокатки, выход первого сумматоре с первым входом nepsoto блока умиоженмч, второй вход которого соединен г выходом блока задания коэффициентов, выход первого блока умножения соединен с первым входом третьего сумма гора, второй в код которого через инвертор соединен с выхидом второго блока умножения, первый вход ко- торо о соединен с выходом блока задержки. первый выход второго датчика усилия прокатки соединен с первым входом зторого блока задания усилия прокатки, ЗЫУОД ого- рого сумматора соединен с перв./ г входом блока задержки, второй вход кот wjro соединен с выходом блока деления, первый вход которого соединен с датчиком скорости прокатки в предыдущей клети, «торой вход блока деления соединен с четвертым входом электрогидравш/неекого регулятора давления, отличаю щ е е с я тем, чтс, г целью повышения точности регулирования формы полосы и усюйчивостм прокатки, оно снабжено приводом нажимных винтов и регулятором положения нажимных винтов в регулирующей клети, вторым задатчиком формы полосы, двумя сумматорами, двуь«я блоками деления, двумя блоками умножения, тремя блоками коммутации, блоком слежения и блоком управления, причем второй выход злектрогидравлического регулятора давления соединен с первым входом блока слежения, выход регулятора положз- ния нажимных винтов соединен с «торым входом блока слеженич и с входом привода нажимных винтов, выход второго за/.атчика формы полосы соединен с первым входом регулятора положении нажимных сшитов, второй вход которого л первый вход блея а управления соединены с вторым выходом датчика контроля формы, -фетий вход регулятора положения нажимных винтов соединен с выходом четвертого сумматора, первый вход которого соединен с вторым выходом блока слежения, а второй вход - с выходом второго блока деления, первьй вход которого соединен с выходом устрой ства задания коэффициентов, eiopou вход второго блока деления с выходом пятого сумматора, первый, второй третий и чеч вер тый входы которого соединены cociaeiCT венно с первым, вторым, третьи1/ и
четвертым выходами первого блокй коммутации, первый вход которого соединен с вторым выходом первого блока задания усилия прокатки, второй вход первого бпока коммутации соединен с третьим выходом блока слежения, агорой вход первого блока коммутации соединен с выходом «ет зертого блока умножения, четвертый РХОД ПСОРОГО блока коммутации, второй вчод первого бло кз заданий усилия прокатки третий EXO/J блока слежения соединен у с вторым зычс дом первого усилия прокатки, первый вход т ретиего блока мчоже.чия, первый вход третьего блока коммутации и пэрвый вход треть го бпокэ делении соединены г первым выходом второго блоке задания vcn лия прокг-.я, второй а/од третьего блоки умножени / - горой в оа чеге ргого 5ло(а умножения соединены с че.ес мы зыхо дом блока слежения, шестой зьходкоо о. с соединен с вторым входом третьего IOK.J коммутации, третий вход которс о соеди «ин с первым выходок второго датчика прокатки, первый, втооой и третий выходы третьего блока коммутации соединены соответственно с первым, вторым ш третьим входами зторого сумматора, второй выход второго датчика усилия прокаткм соединен с вторым входов второго блока задания усилия про атки, второй в УХОД которого соединен с первым входом четвертого блока умножения, первый вход второго блока коммутации и второй РХОД третьего блока деле- кяя соединены с первым выходом первого блока задания усилия прокатки, второй вход второго блока коммутации соединен с пятым выходом блока слежения, третии зход- с выходом третьего блока у нохения, четвертый вход - с перг -да выходом первого датчика усилия прока №, перзый, второй, третий я четвертый вмходы второго блока коммутации соединены COOIBJ-CTB HHO с первым, вторым, третьим и чесзс-ргьп еко- цами первого сумматора перчиД «5ыход Злака слежения соединен с третям а кодом третьего сумматора, четвертый вход блока слежения соедмч-н с выходом т оетьего блока деления, пятый и шестой выходы блока слежения соединены с первому, выходами соответственно первого и второго датчиков усилия прока гки, седы ой вчо ц ппока слежения соединен с выходе v /травления, втооой вход котороп оеди «ей с гзрвг- ад ьыходо датчика онполи пспосы, третий ВАОД блока управления сэедьне с выходом датчика скорости пред- ыдушей клети, четвертый, пят-и и шестой входы - соответственно с .и) датчиков контроля наличия r ь а поедыду шей KreiK peryuipy пщай .л и пгр
мпГи °ппг1НТГЛЯ Ф°РМЫ ПОЛ°СЫ Э СеДЬ ходами первого и второго задатчиков мой и восьмой входы - соответственно с формы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система совместного регулирования толщины и профиля полосы в клети непрерывного прокатного стана | 1981 |
|
SU980891A1 |
| Устройство совмещенного регулирования продольной и поперечной разнотолщинности полосы в процессе прокатки | 1980 |
|
SU899183A1 |
| Устройство для гидроизгиба рабочих валков непрерывного прокатного стана | 1986 |
|
SU1359037A1 |
| Система совместного регулирования толщины и профиля полосы при прокатке | 1990 |
|
SU1731320A1 |
| Система регулирования толщины полосы на стане горячей прокатки | 1980 |
|
SU910250A1 |
| Устройство для регулирования профиля рабочих валков стана кварто | 1982 |
|
SU1065053A1 |
| Устройство противоизгиба валков | 1984 |
|
SU1202655A2 |
| Устройство автоматического регулирования толщины полосы | 1982 |
|
SU1044363A1 |
| Система автоматического регулирования толщины и профиля полосы проката | 1982 |
|
SU1041995A2 |
| Устройство регулирования натяжения полосы | 1981 |
|
SU939150A1 |
Изобретение относится к контрольным и регулирующим устройствам прокатных станов, реагирующим на изменение формы полосового проката, и может быть использовано в прокатном производстве черной металлургии. Цель изобретения - повышение точности регулирования формы полосы и устойчивости прокатки. Устройство компенсирует несимметричные дефекты формы, возникающие по краям прокатываемой полосы, а также симметричные дефекты путем воздействия на изгиб валков, путем введения в устройство регулятора положения на- жимных винтов, регулирующего форму клети, второго задатчика формы полосы и блоков коммутации каналов регулирования и соответстаующего блока управления. 8 ил.
С датчика наличия мв. ,талла в клет
С датчика наличияп
металла 8 клети Сйатчика наличИ$-1Г ( металла под да/миком формы
/г/
Г
ФиЗ.ё.
С выхода устройства задания коэффициентов
71
f.w ftviv; v/u, AV
gj cyerp
HOfaxg Я /7 l У
1L
Г
ffWffU/JUSfgWWJ
gxn/orf ц
НЈ$СЛр Л Л Д Р Ј у
..L /
T LLf.
OMMffU/dU/gfU/Off J
se y0w
vq&J/Js J ffjy 1
Li
.J
S ,
ffoygtf
CfC Cf/ J
,: owtf Cfonjis
fЈWt
-i-r- W S
---„ i ... ..-- с
71 I/ з(
llJVT V V V/
/Усб
e
j
9999891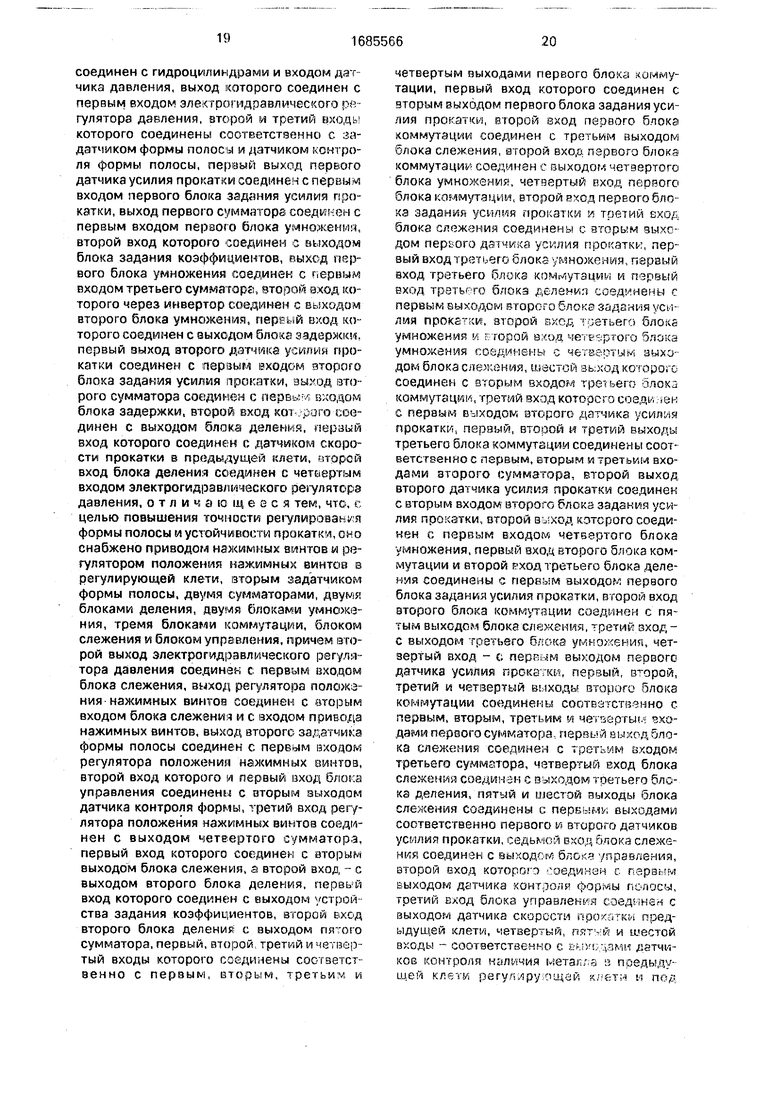
| Средства измерения и системы автоматического управления профилем и формой полосы на широкополосных станах за рубежом | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Точная прокатка тонких полос | |||
| - М.: Металлургия, 1972, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Стефанович В.Л | |||
| Автоматизация непрерывных и полунепрерывных широкополосных станов горячей прокатки | |||
| - М.: Металлургия, 1975, с | |||
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
| Устройство для гидроизгиба рабочих валков непрерывного прокатного стана | 1986 |
|
SU1359037A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
