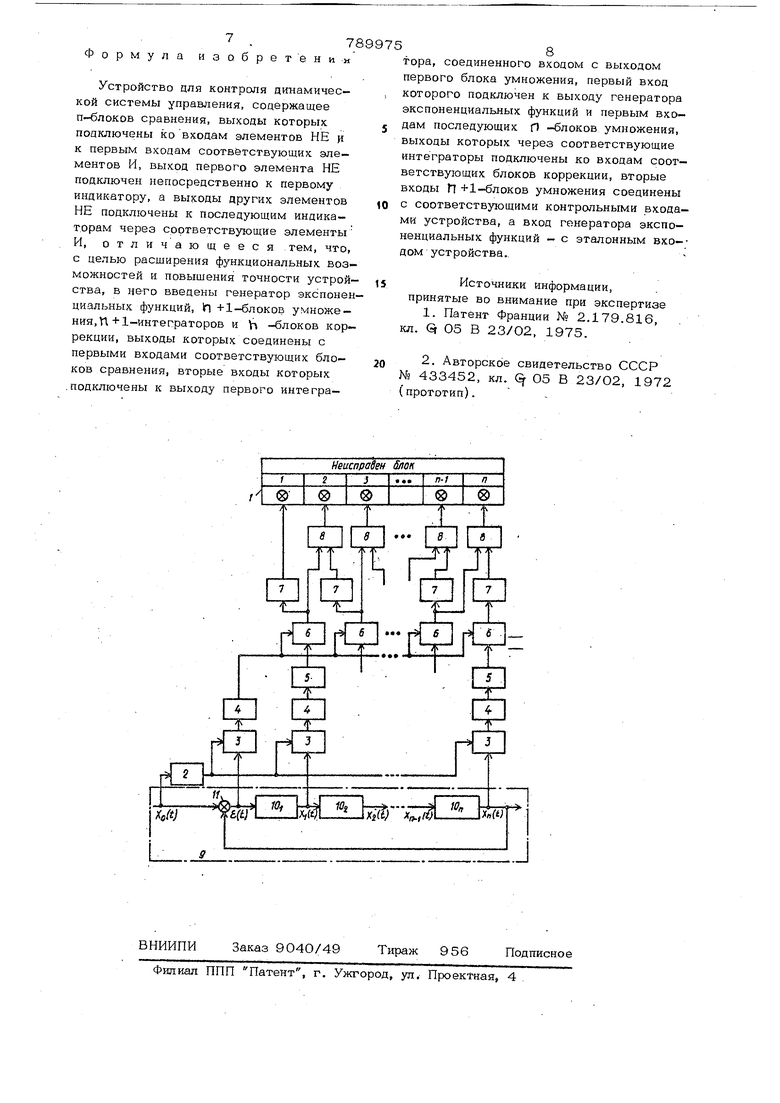
Устройство для контроля динамической системы с обратной связью относит- ся к автоматике и контрольно-измерительной технике и может быть использовано в системах автоматического контроля динамических объектов, в HacTHOCTi судовых систем управления и регулирования, а также энергомеханических объек тов с системами стабилизации в замкнутом контуре. В процессе эксплуатации динамических систем с обратной связью наблюдается ухудшение характеристик их элементов как в прямой, так и в обратной цепи, что приводит к частичной, а при дальнейшем развитии и полной потере работоспособности систем. Известно устройство для контроля динамических систем с обратной связью, обеспечивающее измерение выходного сиг нала Системы и сравнение его с эталоном или оценку численных показателей качест ва переходного процесса flj. Однако это устройство обладает целым рядом недостатков: производится оценка работоспособности .системы В целом, при этом не предусматривается распознавание неисправностей отдельных блоков системы как в прямой, так и в обратной цепи, что приводит к низкой глубине контроля, недостаточной в реальных условиях; измеряются мгновенные значения переходной функции в дискретные моменты времени, что требует сложной и высокоточной измерительной аппаратуры, особенно при быстропротекающих переходных процессах; производится сравнение мгновенных значений переходной функции с ее эталоном (или номиналом) во множестве точек по времени, что приводит к значительному усложнению Аппаратуры обра- , ботки данных и к ее избыточности. Наиболее близким по структуре к предлагаемому устройству является устройство для контроля следящих систем, содержащее три схемы сравнения, две логические схемы ИЛИ, пять логических схем И, датчики напряжения косинусной и статорной обмоток и датчики напряжения усилителя, соециненные соогвегсгвующим обра зом, что позволяет в статическом режим функционирования системы осуществить поиск отказов ее блоков в прямой цепи, вызвавших, полную потерю работоспособ- ности системы .21. К основным недостаткам данного устройства можно отнести: .распознавание отказов динамической системы только в . статическом режиме, что не позволяет выявлять целый ряц неисправностей, проявляющихся в переходных характеристика .. невозможность распознавания неисправностей в прямой или обратной цепи системы без изменения ее структуры, что требует вывода системы в специально организованный режим тестового конт роля; не обеспечивается поиск неисправностей блоков системы на ранней стадии их возникновения, что существенно снижает ее живучесть и эффективность функ ционирования. Цель изобретения - расширение функциональных возможностей и повышение точности устройства. Указанная цель достигается тем, что в устройство, содержащее п-блоков сравнения, выходы которых подключены ко входам элементов НЕ и к первым входам соответствующих элементов И, выход первого элемента НЕ непосредственно подключен к первому индикатору, а выходы других элементов НЕ подключены к последующим индикаторам через соответствующие элементы И, введены генератор экспоненциальных функций, tt+1-бло ков умножения, 1г1 +1-интеграторов и п-блоков коррекции, выходы которых сое динены с первыми входами соответствую щих блоков сравнения, вторые входы которых подключены к.выходу первого интегратора, соединенного входом с выходом первого блока умножения, первый вход которого подключен к выходу генератора экспоненциальных функций и первым входам последующих п-блоков умножения, выходы которых через соответствующие интеграторы подключены ко входам соответствующих блоков коррекции, вторые входы h +1-блоков умножения соединены с соответствующими контрольными входами устройства, а вход re нератора экспоненциальных функций - с эталонным входом устройства. Предлагаемое устройство .для контроля динамической системы управления, состоящей из п-блоков, формирует параметры состояния каждого блока, получен 7 5 ные путем преобразования по Лапласу временных функций блоков У ( t ),1 -1.,. ... Я x.(s)),dt,(i) где S С iW. При этом рассматриваются функции в области вещественной переменной 2:d в интервале О S -со . Аналогично для сигнала рассогл/асова- ния системы S ) формируется преобразованный по Лапласу параметр рассогласования системы: (S) (г)}- s(t)-oit. (2) С другой стороны, текущие значения параметров состояния блоков можно выразить через параметр рассогласования системы и передаточные коэффициенты Х в виде (}- у fc,v-e-i .к. (3) X( ...Кп где передаточные коэффициенты --l/4(Sjl V-i/W,(5K)-V/(S,)...; . i V/,(5)-4(SO...V/H(bK) определяются через передаточные функ- ции блоков Wi(SK) при фиксированном значении , которое соответствуетпостоянной времени контролируемой динамической системы. Разделив каждое выражение ( 3) системы на соответствующую правую часть и умножив полученную левую и правую части на отношения . «1 -дд. Krto-.. Кп по получим логические-условия работоспособности каждого, блока (ли}х;()Цд Л1-|.IМ) (р,если Xi(S nx Q-ECS}l7 l где )i jO - передаточный коэффициент л -Го исправного блока сис темы. Имея логические условия (4), можн сформировать набор логических уравне ний, позволяющих распознавать неиспр ные блоки в системе с обратной связь V4v, Г-Хм ; п-ч лп-а n - П П ) где UQ - логическая функция, характ ризующая состояние всей с темы в целом; |3 Un-Jh - логические функции, характ зующие состояние кажцого 1г -блоков системы. На чертеже приведена блок-схема предлагаемого устройства. Устройство содержит блок 1 индика торов, генератор 2 экспоненциальных функций, блоки 3 умножения, интеграторы 4, блоки 5 коррекции, блоки 6 сравнения, элементы НЕ 7, элемент И 8, объект 9 контроля, состоящий из блоков 10 -lOji динамической систем управления, и элемента 11 сравнения. Предлагаемое устройство работает следующим образом. При возникновении неисправности, например во втором блоке 1О динамической системы и наличии на ее входе внешнего возмущения или входного воздействия (как в режиме тестового конт роля, так и режиме рабочего функциони рования), запускается генератор 2, фор мирующий экспоненту, которая подается на вход блоков 3. Сигнал рассогласования системы S (i) и выходные сигналы .М. XaW . . . Xn(t) блоков 1О -lOft- поступают на второй вход блоков 3 соответственно канала формирования параметра рассогласования и П каналов формирования параметров со тояния -блоков системы. Полученные в блоках 3 произведения интегрируются р интеграторах 4, на выходе которых формируют сигналы, пропорциональные параметрам рассогласования и состоянию блоков системы X((S) Х (5) ч полученные путем преобразования по Лапласу входных сигналов tCt) и x(t), X2(t),...x(t). Каждый из параметров состояния (5 в блоках 5 коррекции умножается на коэффициенты предыдущих блоков Kio -jO 2O 0 величина которых определена для исправного состояния блоков , Выходные сигналы блоков 5 (произведенияД|($) .П 4 Р параметр рассогласова1ия € (S) поступают на входы блоков 6 сравнения, в которых определяется их разность, и затем она сравнивается с эталонными значениями AQ - П определяющими степень работоспособности каждого блока. На выходе всех блоков 6 сравнения, кроме второго, появляются логические сигналы ----- n- i т. к. разность произведения XtCSXy l jo и параметра рассогласования 5 (5 для соответствующих блоков (10 -Ю) меньше эталонов д(. На выходе второго блока 6 сравнения сигнала нет, т. к. сформированная в ней разность для неисправного второго блока lOj системы больше Л5 , При такой комбинаций .выходных сигналов блоков 6 на всех элементов НЕ 7, кроме второго, будет отсутствовать сигнал. В результате этого на выходе только одного элемента И 8, соответствующего второму блоку 10 , появляется сигнал, когорый и включает табло НЕИСПРАВЕН БЛОК, 2 индикатора. Работоспособность устройства не нарушается и при наличии кратных неисправностей в динамической системе. Такое выполнение устройства расширяет его функциональные возможности путем распознавания неисправностей каждого блока динамической системы как в прямой, так и в обратной его цепи, на ран- ней стадии их возникновения в режиме функционирования или тестового контроля независимо от ткпа возмущения, а также повышает точность контроля за счет перехода от обработки переходных функций к обработке преобразованных по Лапласу чисел, что также позволяет существенно повысить достовернсх;гь оценки остаточного ресурса динамической системы. 7 Формула и зоб р е т е н и н Устройство для контроля динамической системы управления, содержащее п- 5локов сравнения, выходы которых подключены ко входам элементов НЕ i к первым входам соответствующих элементов И, выход первого элемента НЕ подключен непосредственно к первому индикатору, а выходы других элементов НЕ подключены к последующим индикаторам через соответствующие элементы И, отличающееся тем, что, с целью расширения функциональных возможностей и повышения точности устройства, в него введены генератор экспонен циальных функций, И +1-блоков умноже - ния,У +1-интеграторов и h -блоков коррекции, выходы которых соединены с первыми входами соответствующих блоков сравнения, вторые входы которых .подключены к выходу первого интегра- 7 гора, соединенного входом с выходом первого блока умножения, первый вход которого подключен к выходу генератора экспоненциальных функций и первым входам последующих П -блоков умножения, выходы которых через соответствующие интеграторы подключены ко входам соответствующих блоков коррекции, вторые входы П +1-блоков умножения соединены с соответствующими контрольными входами устройства, а вход генератора экспоненциальных функций - с эталонным вхо- дом устройства. Источники информации, принятые во внимание при экспертизе 1.Патент Франции № 2.179.816, кл. Q О5 В 23/02, 1975. 2.Авторское свидетельство СССР N9 433452, кл. ( О5 В 23/02, 1972 (прототип). .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снятия динамических характеристик системы управления | 1980 |
|
SU974342A1 |
| Устройство для определения степени загрязнения конденсатора | 1980 |
|
SU926500A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| Устройство для контроля усилителей | 1979 |
|
SU868711A1 |
| СПОСОБ ПОИСКА НЕИСПРАВНОГО БЛОКА В ДИНАМИЧЕСКОЙ СИСТЕМЕ | 2001 |
|
RU2199776C2 |
| Следящая система Фомина | 1990 |
|
SU1798763A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
