(54) МАЯТНИКОВЫЙ КОМПЕРГСАЦИОННЫЙ
1
Изобретение относится к области измерительной техники, а именно к измерению ускорения, и может быть исноль- зовано в инерциогшых навигационных системах.
При работе маятниковых компенсационных акселерометров на реальных объектах они подвергаются воздействию вибрации (работа силовых установок, тур.булентность атмосферы и т.ц). В результате воздействия на чувствительный элемент вибрационных ускорений на выходе акселерометров появляется систематическая погрешность.
Известен акселерометр, содержащий две инерционные массы, одна из которых сбалансирована Г.
Такое выполнение акселерометра снижает в выходном сигнале погрешность, зависящую от вибрации основания, и несколько расширяет область измеряемых частот.
Известен также акселерометр, в котором для компонсащти влияния вибрационАКСЕЛЕРОМЕТР
2ных ускорений HHepHHoHH6n-Tviactra Tfo3Be шена с помощью спиральных пружин на рычаге с некоторой свободой перемещения массы вдоль рычага 2.
Рассмотренные акселерометры обла. дают недостаточной точностью в широком диапазоне частот вследствие узкой полосы-пропускания механических элементов, очень сложны конструктивно и требуют точной регулировки.
10
Наиболее близким по технической сущности к предлагаемому является маятниковый компенсационный акселерометр, содержащий рычаг с закрепленными на
15 нем инерционной массой, якорем датчика угла, индуктивно связанным со статором датчика угла, состоящим из сердечника и обмоток, ПОСТОЯННЬПУ магнитом датчика момента, индуктивно связанным с
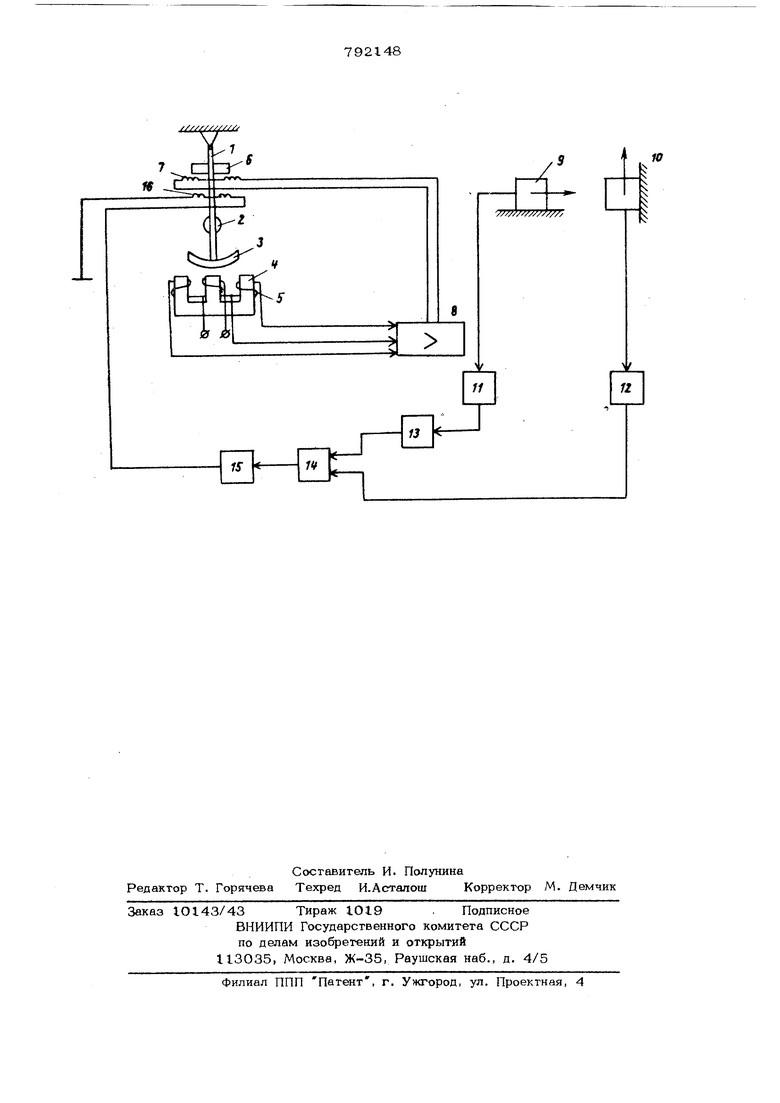
20 управляющей обмоткой датчика момента, причем обмотки статора датчика угла через усилитель подключены к управляющей обмотке датчика момента jf. Основным недостатком подобного аксе лерометра является го, что при работе н 1толвишадм основании рычаг с за1 реппеи;:гьзмн ,va HKw: эпеыенткли отклоняется как н-од действием полезного, так и под действкем вибрационнОГо ускорения, направлеюге которого в обшем случае произ вольно. При этом выходной сигнал акселерометра будет содержать norpesuHocTbj пропорциональную действующему вибра- ционному ускорению. Цель изобретения - повышение точности измерения ускорения при работе акселерометра на подвижном объекте. Указанная даль достигается тем, что 3 предлагаемый акселерометр введены первый датчик вибрации, ось чувствт ель яости которого совпадает с осью чувстви тельности акселерометра, второй датчик вибрации, ось чувствительности которого совпадает с осью отсчета угла отклонения инерционной массы, первое и второе деф1 ерни ф57ощие звенья, входь которых подюгаочены к выходам соответствуюших датч.15Ков BJiepaiTj-m, последовательно соединенные блок определения оценки угла откпокеш-гя, вход которого подключен к зьгхсду парвого д:йфференц1ф5тощег о звена :Л.гг1окэнкв:; первый вход которого ксдк-лючен к выходу блока определения опещш утпе. отклонения, а второй входX выходу второго дифферен11иругощего звена, осредняющий фильтр и компенсационная обмотка, кндуа тивно связанная с постоянным магнитом датчика момента На чертеже представлен предлагаемый акселерометр. Он содержит рычаг 1 с закрепленным на нем инерционной массой 2, якорем 3 датчика угла отклонения, инду1стивно свя занным со статором датчика угла отклонения, состояшим из сердечника 4 и обмоток 5, постоянньм магнитом 6 датчика момента, индуктивно связанным с управляющей обмоткой 7 датчика момен причем обмотки 5 статора датчика угла отклонения через усилитель 8 подключен к управляющей обмотке 7 датчика момен Два датчика 9 и Ю вибрашш (ось первого .датчика 9 выбрации совпадает с осью чувствительности акселерометра , а второго датчика 10 - с осью отсчета угла отклонения инерционной массы (установлены на корпусе акселерометра и предзначены для определения вибраций, действующих на акселерометр) . Дифференцирующие звенья 11 и 12 подключены соответственно к выхо дам датчиков 9 и 10 вибраций и служат для двойного дифференцирования сигнала датчиков, вибрации. Блок 13 определения оценки утла отклонения чувствительного элемента под действием вибрации, выполненный в виде фильтра с передаточной функцией, равной передаточной функции акселерометраWg(pi состоящего из элементов 1-8, соединен с выходом первого дифференцирующего звена It. Выходы второго дифференцирующего звена 12 и блока 13 соединеHbF с входами умножителя 14, выход которого через осредняющий фильтр 15 соединен с компенсационной обмоткой 16, которая индуктивно связана с постоянным магнитом 6 датчика момента. Под действием ускорения рычаг I с инерционной массой 2 и якорем 3 датчика угла отклоняется на угол Ср . Сигнал рассогласования с обмоток 5 датчика отклонения поступает на усилитель 8, и затем усиленный сигнал поступает в управляющую обмотку 7 датчика момента, магнитное поле которой, взаимодействуя с полем постоянного магнита 6, создает момент, компенсирующий момент сил шерции. При работе акселерометра на вибри рующем основании на рычаг I действует вибрация одновременно с ускорением, ко- . торая отклоняет рычаг с инерционной массой 2 на дополнительный угол, величина которого определяется интенсивностью и направлением действия вибрации. Отклонение рычага 1 на угол (О, соответствует воздействию на рычаг I вредного момента. ep-meag gpcp(ilcosoi ГП - масса инерционной массы; 8 - длина рычага; °вИБР вибрационное ускорение, действующее на акселерометр; ф, (t) - угол отклонения рычага под действием вибрации; C(j -УГОЛ между направлением действия вибрации и осью отсчета угла oтклoнe шя инерционной массы. С Помощью введенных элементов создается момент, равный по величине и прО тивоположный по направлению М gt Датчики 9 и 10 вибрации изм еряют действующие вибрации по двум взаимно перпендикулярным осям. Сигнал с датчиков дважды дифференцируется в дифференцирующих звеньях -11 и 12, выходной сигнал которых соответ- ствует составляющим вибрационного ускоpeHHHu gj tp MCLfjgHBp Сигнал, соответствующий с|.„, поступает через блок 13 опредеЛе шя оценки угла отклонения маятника, вьгаолненный в вид оптимального фильтра,и на выходе получается сигнал, соответствующий оценке (п (4;) угла отклонения инерционной массы под действием вибрации. Сформированный сигнал и сигнал, соответствующий с1ур| р одаютс на умножитель 14, в котором перемножаются и масштабируются. Сигнал на вых умножителя 14 будет пропорционален мгновенному значению /V, gn , Осредняя его с помощью осредняюшего фильтра 1 получают сигнал, соответствующий дей™ ствующему значению .М 0р . Под действием этого сигнала, подаваемого в компенсационную обмотку 16, индуктивно Связанную) с постоянным магнитом 6 датчика моментов, чувствительный элемен возвращается в положение, соответствую щее-отклонению под действиетл измеряемого ускорения. Положительный эффект, обусловленны Новой совокупностью признаков, состоит в уменьшении систематической погрешности маятникового компенсационного ак селерометра при работе его на вибриД рующем основании в широком диапазоне частот, вследствие того что полоса пропускания предлагаемой схемы коррекции существенно выше, чем полоса пропуска механических устройств, использующихся в существующих акселерометрах. Формула изобретения Маятниковый компенсационный акселе рометр, содержащий рычаг с закрепленны 79 86 ми на нем хшершзонной массой, якорек датчика угла, инд -кгнвно сгзязанным со статором угла, состояииа из сер.. дачника и обмоток, постоянньж- магнитом датчнтса момента, инду7 ;тивно связан™ ным с чтравляюшей обмоткой датчтсо момента, причем обмотки статора датчика угла через усилитель подключены к управ- ляющай обмотке датчика момента, о т л и ч а ю щи йс я тем, что, с целью повышения точности измерения ускорения при работе акселерометра на подвижном объекте, в него введены первый датчик вибрацяи; ось ч аствительности которого совпадает с осью чувствительности акселерометра, второй датчик вибрации, ось чувствительности которого совпадает с осью отсчета угла отклонения инерционной массы,, первое и второе дефферен- цируюпше звенья, входя которых подключены к выходам соответствующих датчиков вибрации, последовательно соединенные блок определения оценки угпа отклонения, вход которого подключен к выходу первого Д11фференц1фующего звена, блок умножения, первый вход которого подключен к выходу блока определения оценки угла отклонения, а второй вход - к выходу второго дифференцирующего звена, осредняющнй фильтр и компенсашгонная обмотка инд аст11вно связанная с постоянным магш1Том датчика момента. Источники информаш™, принятые во внимание при экспертизе 1.Авторское свидетельство СССР Jsb 161579, кл. Q О1 Р 15/02, 1964. 2.Авторское сондетельство СССР № 139О89, кл. Q 01 Р 15/О8, 1960. 3.Браславсккй Д. А. Приборы и датч.чки летательных аппаратов. М., MamiiHoстроение, 1970, с. 352 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| Компенсационный акселерометр | 1982 |
|
SU1067445A1 |
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1980 |
|
SU1840724A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1974 |
|
SU1839856A1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825144A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Устройство для измерения параметров вибрации | 1982 |
|
SU1024855A1 |
| Компенсационный акселерометр | 1990 |
|
SU1795374A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |