1
Изобретение относится к машиностроению и может быть использовано в промышленных роботах, в частности роботах, используемых с листоштамповочными прессами.
Известен привод исполнительного органа промышленного робота, содержаш,ий связанный с исполнительным органом силовой цилиндр, полости которого при помош,и трубопроводов связаны с распределителем, управляемым системой управления и связанным двумя трубопроводами с системой подачи рабочей среды 1.
Недостатком известного привода является низкая скорость возврата исполнительного органа в исходное положение при аварийной ситуации.
Целью изобретения является устранение указанного недостатка.
Иоставленная цель достигается тем, что привод снабжен дополнительным распределителем, управляемым системой управления и связанным распределителем с системой подачи рабочей среды, каждый из выходов дополнительного распределителя соединен при помощи трубопровода и обратного клапана с одной из полостей силового цилиндра.
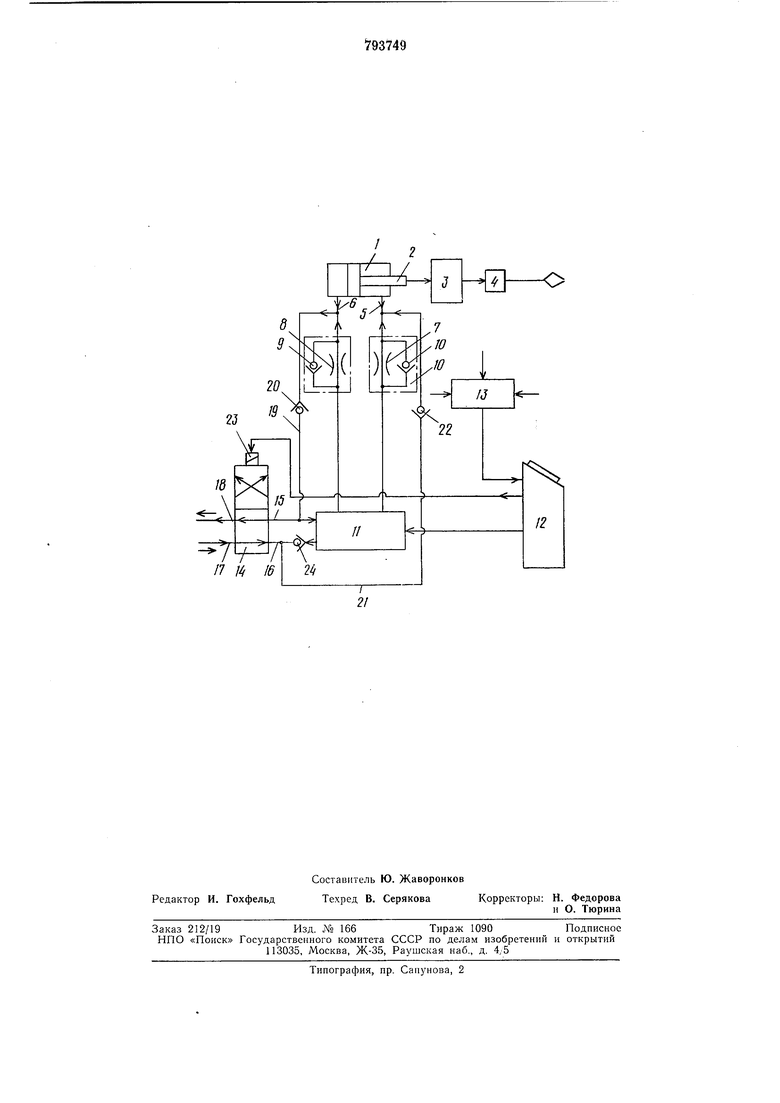
На чертеже изображена схема предлагаемого привода..
Привод исполнительного органа промышленного робота содержит силовой цилиндр 1, шток 2 которого через механизм 3 преобразования и передачи энергии связан.с
исполнительным органом 4, например рукой с захватным органом.
Рабочие полости силового цилиндра 1 при помощи трубопроводов 5 и 6 через дроссели 7 и 8 и обратные клапаны 9 и 10 связаны с золотником И (распределителем).
Дроссели 7 и 8 служат для регулировки скорости перемещения штока 2 силового цилиндра 1, т. е. в конечном итоге для регулировки скорости изменения давления
в рабочих полостях силового цилиндра 1. Золотник И (или иной распределительный орган рабочей среды) управляется центральной системой управления 12.
Система управления 12 связана с системой сбора и преобразования информации 13.
Золотник (распределитель) 11 связан с золотником 14 посредством трубопроводов
15 и 16, а золотник 14 - с магистралью подачи рабочей среды при помощи трубопроводов 17 и 18.
Золотник 14 (распределитель) управляется системой управления 12.
Один из выходов золотника 14 при помощи трубопровода 19 через обратный клапан 20 связан с одной из полостей силового цилиндра 1, а другой выход золотника 14 при помощи трубопровода 21 через обратный клапан 22 - с другой полостью силового цилиндра 1.
Золотник 14 управляется электромагнитом 23.
Привод исполнительного органа промышленного робота работает следующим образом.
Центральная система управления 12 подает сигнал на включение электромагнита 23, который включает золотник 14.
Рабочая среда из магистрали высокого давления (или от насоса) по трубопроводу 17 через золотник 14 по трубопроводу 15 поступает в распределитель 11 (золотник) из распределителя 11 по трубопроводу 6 через обратный клапан 9, рабочая среда поступает в рабочзЮ полость силового цилиндра 1. Из возвратной полости силового цилиндра 1 рабочая среда по трубопроводу 5 через дроссель 7 поступает в распределитель 11, из которого через обратный клапан 24 по трубопроводу 16 поступает в золотник 14 (распределитель), а из него по трубопроводу 18 - в сливной бак или в магистраль.
Исполнительный орган 4 перемещается при этом в рабочую зону пресса (на чертеже не изображен). Скорость перемещения исполнительного органа 4 определяется настройкой дросселя 7.
При переключении распределителя И на реверс по сигналу центральной системы управления 12 рабочая среда по трубопроводу 17 поступает в золотник 14 и по трубопроводу 15 - в золотник 11 (распределитель)
и из него по трубопроводу 5 через дроссель 7 - в возвратную полость силового цилиндра 1. Из рабочей полости силового цилиндра 1 рабочая среда по трубопроводу 6 через дроссель 8 поступает в распределитель 11, из которого по трубопроводу 16 через обратный клапан 24 - в золотник 14, а из него по трубопроводу 18 отводится в магистраль, поступает в трубопровод 15 и по нему в золотник 14.
Из золотника 14 рабочая жидкость по трубопроводу 18 поступает в магистраль.
Исполнительный орган 4 отводится в исходное положение ускоренно.
Формула изобретения
Привод исполнительного органа промышленного робота, содержащий связанный с
исполнительным органом силовой цилиндр, полости которого при помощи трубопроводов связаны с распределителем, управляемым системой управления и связанным двумя трубопроводами с системой подачи рабочей среды, отличающийся тем, что, с целью ускорения возврата исполнительного органа в исходное положение в аварийной ситуации, привод снабжен дополнительным распределителем, управляемым системой
управления и связывающим распределитель с системой подачи рабочей среды, каждый из выходов дополнительного распределителя соединен при помощи трубопровода и обратного клапана с одной из полостей силового цилиндра.
Источники информации, принятые во внимание при экспертизе 1. Камышный Н. И. Автоматизация загрузки станков. М., Машиностроение, 1977,
с. 267-269, рис. 241.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод модуля промышленного робота | 1986 |
|
SU1349999A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| ГИДРОПРИВОД ПЛАНИРОВОЧНОЙ МАШИНЫ | 1971 |
|
SU296865A1 |
| Привод промышленного робота для струйной обработки | 1986 |
|
SU1390016A1 |
| Привод линейного перемещения | 1980 |
|
SU906111A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| СИСТЕМА ВПРЫСКИВАНИЯ | 2001 |
|
RU2273764C2 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Система топливоподачи газожидкостного двигателя | 1990 |
|
SU1733661A1 |
| КОМБАЙН ПРОХОДЧЕСКО-ОЧИСТНОЙ | 2018 |
|
RU2688711C1 |