О5
Изобретение относится к машиностроению и может быть использовано для автоматизации производственных процессов, связанных со струйнойобработкой.
Цель изобретения - повьшение качества обрабатываемой поверхности и расширение технологических возможностей.
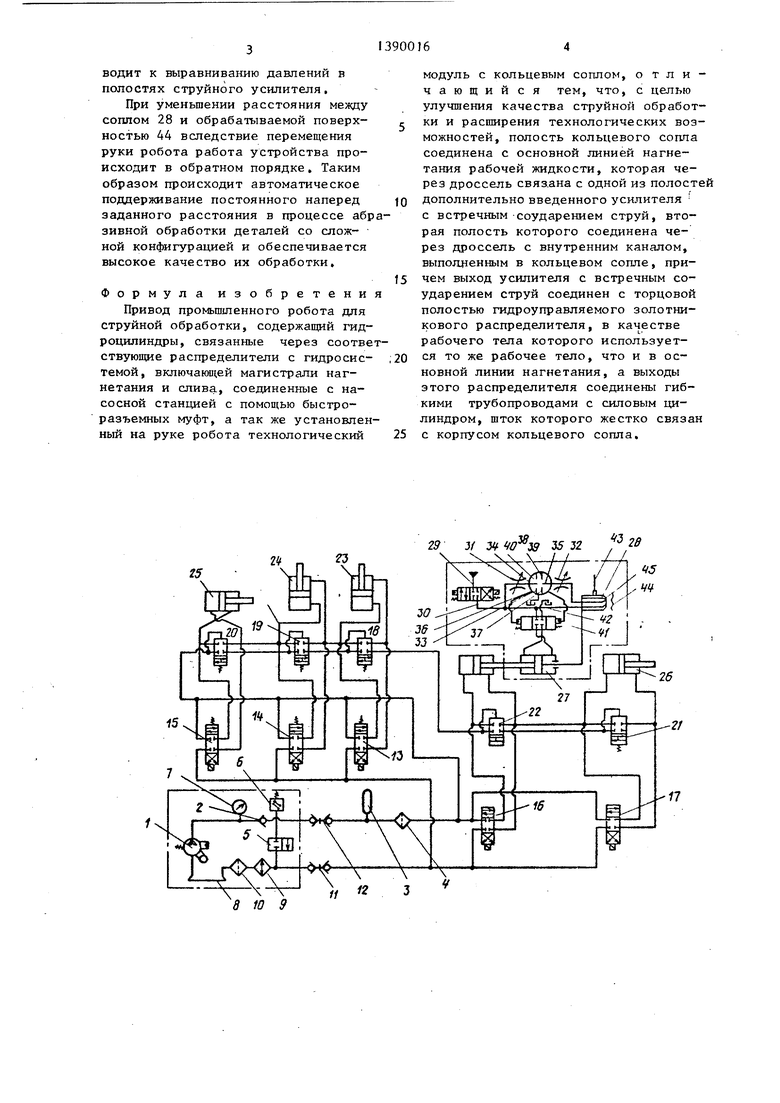
На чертеже изображена схема привода ,
Привод содержит насос 1 переменной производительности, обратный клапан 2, ресивер 3, фильтр 4 высо- кого давления.
Заданное давление масла поддерживается клапаном 5, управляемым реле 6 давления, предназцдченным для отключения манипулятора в случае ава- рийного падения давления масла в системе, и контролируется по манометру 7. Спив масла из системы в бак 8 осуществляется через теплообменик 9 и фильтр 10. Блоки распредели- телей соединены с насосной станцией шлангами и быстроразъемными муф- - тами 11 и 12.
В состав блоков распределителей входят соответствующие распределители 13-17. Переливные клапаны 18-22 при неработающем масляном насосе соединяют противоположные полости гидроцилйндров 23-27 и позволяют пере мещать исполнительный орган робота в режиме обучения.
Технологический модуль содержит кольцевое сопло 28, рабочее тело к которому подводится из гидромагист- рали 29 по гибкому шлангу 30. Рабоче тело подается через дроссели 31 и 3 в струйный усилитель 33, имеющий два встречно направленных вспомога- т- льных сопла 34 и 35 и две диафра мы 36 и 37 с центральным отверстием которое расположено между соплами 34 и 35. Между диафрагмами расположена камера 38, соединенная с атмосферой. Межсопловые 1 амеры 39 и 40 трубопроводами соединены с торцовыми камерами золотника 41. Дросселирующие окна золотника соединены с полостями гидроцилиндра 27 гибкими трубопроводами. Центральная полость гидрораспределителя соединена с гистралью 42 нагнетания. Сопло 28 закреплено на штоке гидроцилиндра 27, который является оконечным модулем прО1уьш1ленного робота с контурным управлением.
По каналу 43 из бункера в сопло подается рабочее тело, которое под давлением выбрасывается на обрабатываемую поверхность детали 44.
.Внутренняя полость 45 кольцевого сопла 28 соединена с основной линией нагнетания рабочего тела, отвод от которой через дроссель 32 ведет в левую полость струйного усилителя, правая полость которого также соединена через дроссель с внутренним каналом, выполненным в кольцевом сопле Такое соединение дает возможность использовать то же рабочее тело, которое используется для струйной обработки и для целей управления ее процессом.
Привод работает следующим образом
По заданной программе рука робота выводится в требуемую точку. Оконечный технологический модуль, смонтированный на руке робота, устанавливается на расстоянии от детали, обеспечивающем качественную обработку. Рука робота движется по установленной программе с заданной скоростью в зависимости от сложности конфигурации детали и свойств обрабатываемого материала.
В процессе обрабртки, при воздействий различных возмущающих факторов происходит изменение расстояния от сопла 28 до обрабатываемой поверхности детали 44. При увеличении этого расстояния уменьшается давление рабочего тела перед соплом 28 и вспомогательным соплом 35 струйного усилителя. Уменьшение давления перед соплом 28 при неизменном давлении перед соплом 34 вызывает смещение результирующего потока в сторону сопла 35, что приводит к повьш1ению давления рабочего тела в камере 39 по сравнению с камерой 40 и соответственно к повьш1ению давления рабочею тела в левой торцовой камере золотникового распределителя 41. В результате смещения золотника увеличивается давление в поршневой полости цилиндра 27. Таким образом, происходит перемещение штока цилиндра 27 вместе с установленным на нем соплом 28 по направлению к обрабатываемой поверхности до тех пор, пока расстояние между соплом 28 и деталью 44 не достигнет заданного, что при
водит к выравниванию давлений в полостях струйного усилителя,
При уменьшении расстояния между соплом 28 и обрабатываемой поверхностью 44 вследствие перемещения руки робота работа устройства происходит в обратном порядке. Таким образом происходит автоматическое поддерживание постоянного наперед заданного расстояния в процессе абрзивной обработки деталей со сложной конфигурацией и обеспечивается высокое качество их обработки,
Формула изобретени
Привод промьшшенного робота для струйной обработки, содержащий гидроцилиндры, связанные через соотвествующие распределители с гидросис- темой, включающей магистрали нагнетания и слива, соединенные с насосной станцией с помощью быстро- разъемных муфт, а так же установленный на руке робота технологический
модуль с кольцевым соплом, отличающийся тем, что, с целью улучшения качества струйной обработки и расширения технологических возможностей, полость кольцевого соппа соединена с основной линией нагнетания рабочей жидкости, которая через дроссель связана с одной из полостей дополнительно введенного усилителя с встречным-соударением струй, вторая полость которого соединена через дроссель с внутренним каналом, выполненным в кольцевом сопле, причем выход усилителя с встречным соударением струй соединен с торцовой полостью гидроуправляемого золотникового распределителя, в качестве рабочего тела которого используется то же рабочее тело, что и в основной линии нагнетания, а выходы этого распределителя соединены гибкими трубопроводами с силовым цилиндром, щток которого жестко связан с корпусом кольцевого сопла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки абразивной струей поверхностей | 1981 |
|
SU1054036A1 |
| Привод подач шлифовального станка | 1988 |
|
SU1664534A1 |
| Гидросистема промышленного робота | 1986 |
|
SU1318392A1 |
| Устройство для обработки абразивной струей поверхностей | 1982 |
|
SU1092036A2 |
| Литьевая машина | 1976 |
|
SU648426A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Стенд для исследования процесса нагнетания скрепляющих растворов в трещиноватые горные породы | 1989 |
|
SU1652581A1 |
| Способ обработки тел вращения и станок для его осуществления | 1985 |
|
SU1315141A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ РАСТВОРНЫХ И БЕТОННЫХ СМЕСЕЙ СТРУЙНЫМ МЕТОДОМ | 1994 |
|
RU2079616C1 |
Изобретение относится к области машиностроения и может быть .использовано для автоматизации производственных йроцессов, связанных со струйной обработкой. Цель изобретения - повышение качества обрабатываемых поверхностей и расширение технологических возможностей. Для этого устройство содержит гидроцнлинд- ры, связанные через распределители с гидросистемой, и установленный на руке робота технологический модуль для струйной обработки, включающий кольцевое сопло, которое закреплено на штоке одного из гидроцилиндров. По заданной программе рука робота выводится в требуемую точку. Технологический модуль устанавливается на оптимальном расстоянии от обрабатываемой детали. Рука робота движется по установленной программе с заданной скоростью. В процессе обработки может происходить случайное изменение расстояния от сопла до обрабатываемой поверхности. Увеличение этого расстояния приводит к уменьшению давления перед соплом и вызывает смещение технологического модуля в сторону обрабатываемой поверхности до тех пор, пока расстояние между соплом и деталью не достигнет заданного. При уменьшении расстояния между соплом и обрабатываемой поверхностью вследствие перемещения руки работа устройства происходит в обратном порядке. Рабочее тело, служащее для технологической обработки, одновременно является рабочим телом первого каскада усилителя,- который через соответствующий распределитель управляет перемещением штока гидроцилиндра, на котором установлено сопло. I ил. (О (Л с 00 со
8 10 9
29 3f yf 35 J2 S V4 V: / /
f7
| Устройство для обработки абразивной струей поверхностей | 1981 |
|
SU1054036A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Юревич Е.И | |||
| и др | |||
| Устройство промышленных роботов | |||
| - Л.: Машиностроение, 1980, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
