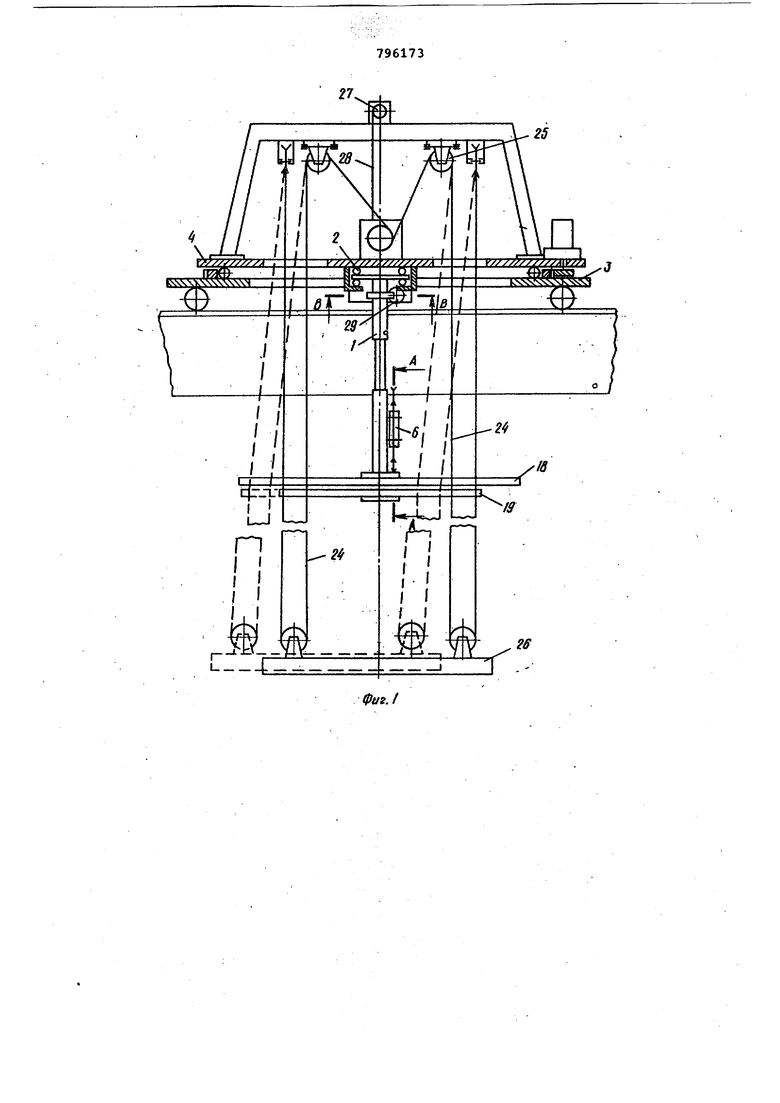
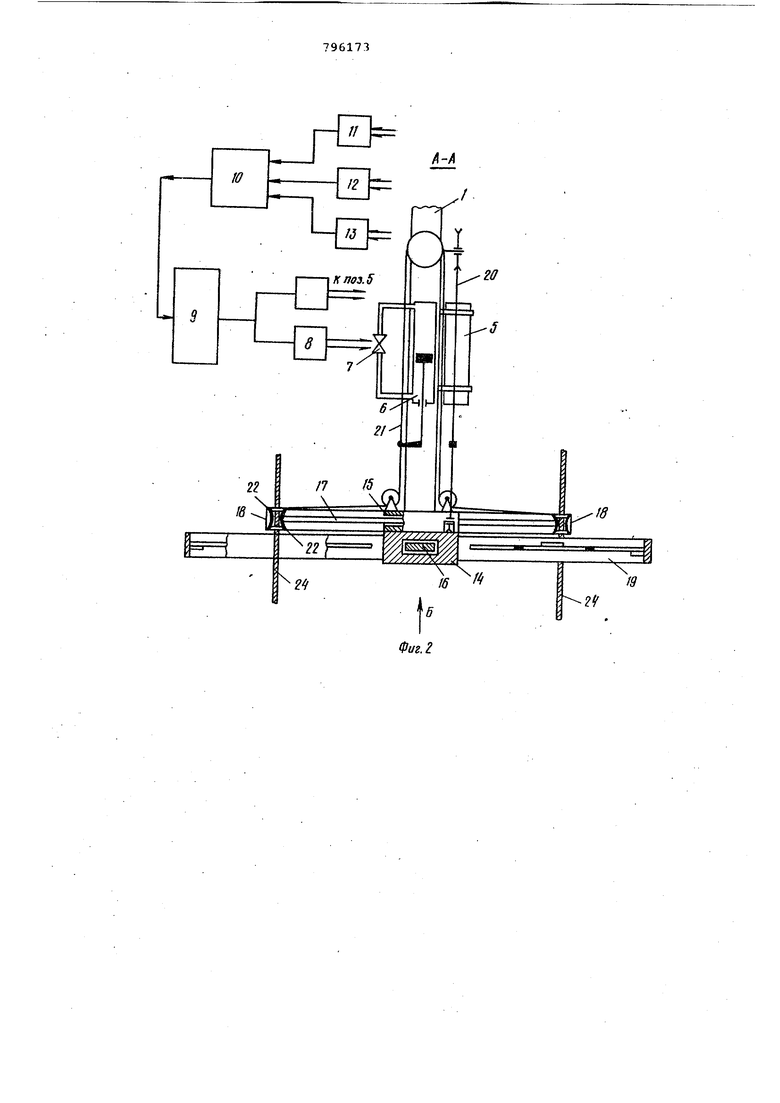
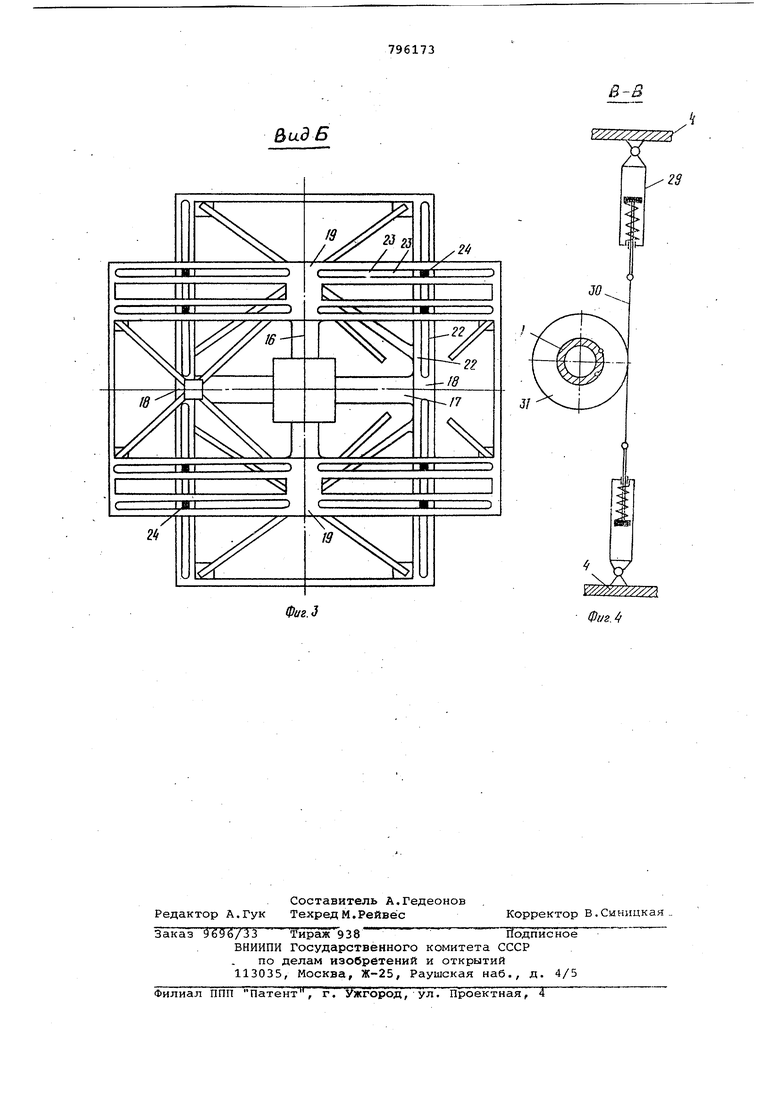
(54) УСТРОЙСТВО ДЛЯ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ГРУЗОЗАХВАТНОГО ОРГАНА НА ГИБКОЙ ПОДВЕСКЕ Устройство содержит телескопическую штангу 1, закрепленную с помощью опорно-поворотного узла 2 на подъемно-транспортном средстве, например грузовой тележке 3, выполненной с поворотным кругом 4. Демпферы 5 и 6 продольных и поперечных колебаний подключены к регулирующему устройст ву, содержащему, например, управляемый клапан 7, электромеханический преобразователь 8, тиристорный усилитель 9 и счетно-решающий блок 10, к которому подключены датчики 11, 12 и 13. соответственно веса груза, длины подвеса грузозахватного органа и расстояния между точкой подве.са гибкого .органа и направляющими для гибкого органа. Демпферы 5 и б зaкpeпJжeны на штанге 1, на которой установлены также и поперечные направляющие 14 и 15, в которых расположены ползуны 16 и 17. Траверсы 18 и 19 жестко связаны с ползунами 16 и 17, которые кинематически соединены с демпферами 5 и 6, например посредством тросов 20 и 21. Направляющие. 22 и 23 для гибкого органа 24 расположены на траверсах 18 и 19 и связаны с ним между его точкой 25 подвеса и грузозахватным органом 26 Штангс. 1 снабжена, механизмом 27 выдвижения, смонтированным на круге 4 тележки 3 и содержащим, например, трос 28. .Устройство может быть снаб жено демпфером 2В крутильных колеба ний, кинематически связанным со шта гой 1 посредством, например, троса 30 и шкива 31. Устройство работает следующим об разом.. При отклонении органа 26 от вертикали гибкие органы 24 перемещают траверсы 18 и 19 относительно штанги 1. Благодаря кинематической связи траверс 18 и 19 с демпферами 5 и б последние оказывают силовое демпфирующее воздействие на гибкие орга ны 24, величина которого зависит от показаний датчиков 11-13, управляющих через счетно-решающий блок 10 и усилитель 9 электромеханическим преобразователем 8, осуществляющим соответствующую . настройку клапана 7 чем и определяется величина силового Демпфирующего воздействия, в час ности, демпфера 6. Поскольку эффективность устройства возрастает с увеличением длины штанги 1, операто стремится полностью использовать дл ну последней. Однако для исключения наезда штанги 1 с траверсами 18 и 1 на технологическое оборудование, ра положенное в рабочей зоне, оператор может уменьшить длину штанги 1 посредством привода 27. Для демпфирования крутильных колебаний предназначен демпфер 29. Оптимальная величина силового демпфирующего воздействия определяется по расчетной формуле ..КР .4/ -,Г величина силового воздействия;коэффициент вес груза; расстояние от точки подвеса гибкого органа до точки приложения силового демпфирую- щего воздействия; ускорение свободного падения; высота подве::а грузозахватного органа. Формула изобретения 1.Устройство для демпфирования колебаний грузозахватного органа на гибкой подвеске, содержащее штангу, установленную на пйдъемно-транспортном средстве, направляющие для гибкого органа/ связанные с последниммежду точкой подвеса гибкого органа и грузозахватным органом, и .демпферы продольных и поперечных колебаний, которые подключены к регулирующему устройству и установлены на штанге, отличающееся тем, что, с целью расширения области применения, оно снабжено продольными и поперечными направляющими, закрепленными на штанге, ползунами, расположенными в продольных и поперечных направляющих и кинематически связан ными с демпферами продольных и поперечных колебаний, и траверсами, жестко соединенными с ползунами, причем направляющие для гибкого органа расположены на траверсах, штан- га выполнена телескопической- и снабжена приводом вьвдвижения, смонтированным на подъемно-транспортном средстве, при.этом регулирующее устройство снабжено датчиками веса груза, длины Подвеса грузозахватного органа и расстояния между точкой подвеса гибкого органа и направляющими для гибкого органа, причем упомянутые датчики подключены ко входу регулирующего устройства. 2.Устройстйо поп. 1, отлич а, юще.е с я тем, что оно снабжено демпфером крутильных колебаний который расположен на подъемноттранспортном средстве и кинематически связан со штангой, и опорно-поворотным узлом, посредством которого штанга установлена на подъемно-транспорт- .ном средстве. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 216204, кл. В 66 С 13/06, 18.03.67. 2.Смехов А.А. и Ерофеев Н.И., Опти1Р альноё управление подъемно-транспортными машинами. М., Машиностроение, 1975, с. 169, рис. 50 (прототип).
25
Tt
Ю
А-А
К поз. 5
20
-У
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Устройство для гашения колебаний грузозахватного органа крана | 1978 |
|
SU753778A1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2196709C2 |
| ТРАВЕРСА | 2017 |
|
RU2661671C1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ, СМЕЩЕННЫМИ ОТ ОСИ ЕГО СТАБИЛИЗАЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1981 |
|
SU1099548A1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ МЯГКИХ КОНТЕЙНЕРОВ ЧЕРЕЗ ИХ ГОРЛОВИНУ | 2005 |
|
RU2280006C1 |
621&идБ2 Фиг.
