Группа изобретений относится к подъемно-транспортному оборудованию и предназначена для горизонтальных стыковочных операций, в основном для отстыковки многотонных модулей от негабаритных изделий специального назначения, а также может быть использовано, в частности, и для пристыковки модулей таких изделий.
В заявленной группе из четырех разнообъектных изобретений, связанных между собой настолько, что они образуют единый общий изобретательский замысел, три объекта относятся к "продукту", а именно являются устройствами, и один объект относится к способу.
Один из объектов-устройств, именно траверса горизонтальной стыковки, представляет собой основной из заявленных в группе изобретений объектов, т.е. целое, а два других объекта-устройства в заявленной группе изобретений являются частями целого (блоки механизма балансировки траверсы - блок задания нагрузки и блок компенсации вектора нагрузки).
Объект-способ в заявленной группе из четырех изобретений относится к технологии выполнения действий с помощью заявленных материальных объектов над материальными объектами, именно к технологии настройки балансировки механизмов заявленной траверсы для работы по перемещению (в том числе для горизонтальной отстыковки или пристыковки) составных частей (модулей) многотонных негабаритных грузов.
Заявленная группа изобретений объединена единой общей задачей и единым общим техническим результатом и связана между собой настолько, что заявленные объекты в группе изобретений образуют единый общий изобретательский замысел, что соответствует требованию законодательства (ст.1375 ГК РФ, ч.4, п.1) в отношении требования единства изобретения.
Уровень техники в области заявленных объектов группы изобретений
Известно грузозахватное устройство для переноса длинномерных грузов, содержащее траверсу с основным и дополнительным захватными органами с крюками, противовес и соединительные стропы (см. авт. св-во СССР №1835768, МПК6 В66С 1/68, 1989).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относится то, что траверса не предназначена для выполнения горизонтальной отстыковки многотонных крупногабаритных модулей изделия специального назначения. Кроме того, в известном техническом решении отсутствует возможность регулировки положения крюка относительно неизвестного центра масс модулей изделия, из-за чего возможен перекос отстыковываемого модуля изделия в продольном направлении, что приводит к повреждению как стыковочных модулей, так и изделия в целом - крупногабаритного многотонного модуля, что является недопустимым для упомянутых изделий.
Известно также такелажное устройство для подъема и кантования груза, содержащее раму с опорными площадками для установки и закрепления к грузу, такелажные узлы для присоединения к траверсе крана, направляющие штанги для рамы (см. патент РФ №2256597, МПК7 В66С 1/66, 2003).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относится то, что траверса не предназначена для выполнения горизонтальной отстыковки многотонных модулей крупногабаритных изделий специального назначения. Кроме того, в известном техническом решении у каждого груза имеется только одно строго определенное положение несъемных подпружиненных болтов, симметрично расположенных относительно оси крюка. Для изделий, имеющих переменное значение расстояния между такелажными узлами, несимметричное расположение относительно крана приведет к продольному наклону изделия с рамой, что недопустимо для технологии ведения работ по горизонтальной отстыковке многотонных модулей крупногабаритных изделий.
Известна, кроме того, грузовая траверса, содержащая коробчатый корпус с вырезом в верхней стенке, грузовой крюк, размещенный в полости коробчатого корпуса, раму с продольными и поперечными балками, сменные грузозахватные устройства, закрепленные на поперечных балках рамы, гибкие тяги, шарнирно закрепленные на раме и корпусе (см. патент РФ №2214961, МПК7 В66С 1/10, 1/68, 2001).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относится то, что траверса не предназначена для выполнения горизонтальной стыковки модулей крупногабаритных изделий специального назначения. Кроме того, в известном техническом решении отсутствуют средства для предотвращения продольного наклона изделия, вместо которых используются лишь переставляемые грузозахватные устройства строго на определенном расстоянии от крюка; в случае значительного расхождения центра масс изделия с осью крюка происходит продольный перекос изделия, что также недопустимо для технологии ведения работ по горизонтальной стыковки модулей крупногабаритных изделий с обеспечением требуемой точности подачи модуля изделия.
Известно также групповое захватное устройство, содержащее основание для присоединения к подъемно-опускному механизму, не менее двух захватов с закрепленной на корпусе цангой с захватными лапами, предназначенными для взаимодействия с грузом (см. патент РФ №2170698, МПК7 В66С 1/66, 1999).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относится то, что траверса не предназначена для выполнения горизонтальной стыковки модулей крупногабаритных изделий специального назначения.
Кроме того, в известном техническом решении вместо подъемно-опускного механизма используется лишь крюк мостового крана, а наличие упругой связи вносит опасную неопределенность при работе с грузами разной длины и разной массы, например от 20 до 80 т, что также недопустимо для технологии ведения работ по горизонтальной стыковке модулей крупногабаритных изделий с обеспечением требуемой точности подачи составной части изделия.
Известна, кроме упомянутых, траверса, содержащая несущую балку с балансировочными гнездами, с которых закреплены стропы с выполненными на них такелажными узлами крепления космического аппарата; с установленной на балке серьгой, состоящей из проушины и хвостовика, связанного с несущей балкой (см. патент РФ №2263065, МПК7 В66С 1/12, 1/68, 2003).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относится то, что конструкция известной траверсы предназначена лишь для одного (штучного) изделия, и не предназначена для выполнения горизонтальной стыковки модулей крупногабаритных изделий специального назначения т.к. не имеет возможности перенастраивания для работы с другими изделиями; кроме того траверса известной конструкции может быть использована в качестве лишь средства транспортирования (перемещения) груза, т.к. конструктивно не имеет в своем составе устройства, "обезвешивающего" груз (перемещаемое изделие) при его горизонтальной стыковке, что не может обеспечить безопасность горизонтальной крановой отстыковки груза; кроме того, допускается возможность значительного перекоса изделия в продольном направлении, что неприемлемо при горизонтальной стыковке крупногабаритных модулей уникальных многотонных изделий.
Известно грузозахватное устройство, содержащее навешиваемую на грузоподъемный механизм скобу с захватом для груза на нижнем конце, вертикальная часть которой представляет собой ходовой винт с правой и левой резьбой и гайками, а нижняя горизонтальная выполнена в виде ряда последовательно связанных четырехзвенных шарнирных механизмов и закреплена на гайках (см. патент РФ №2013347, МПК6 В66С 1/22).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относится то, что эксплуатационные возможности этого грузозахватного устройства ограничены для использования на незначительных глубинах, и такая траверса не предназначена для выполнения горизонтальной отстыковки модулей крупногабаритных изделий специального назначения
Известно также монтажно-навесное грузозахватное устройство, содержащее телескопическую балку из трех полых корпусов, грузозахватный орган, противовес, установленный на балке с возможностью перемещения, и систему выдвижения телескопической балки с ходовым винтом (см. патент РФ №2235672, МПК7 В66С 1/68, 2002). В известном техническом решении использован принцип уравновешивания монтируемого груза при помощи противовеса, перемещаемого по балке с помощью винтовой подачи.
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, которое направлено лишь на упрощение конструкции, уменьшение габаритов и обеспечение удобства пользователей, относится то, что значению рабочей нагрузки соответствует строго определенное уравновешивающее ее значение массы противовеса.
При необходимости работы с различными, отличающимися друг от друга нагрузками, пропорционально им должна изменяться и масса противовеса, что требует установки (снятия) и закрепления на противовесе дополнительных грузовых пластин.
Поэтому траверса известной конструкции не предназначена для выполнения горизонтальной стыковки крупногабаритных модулей изделия с высокой точностью из-за конструктивных особенностей телескопической секции балки, поскольку при выдвижении телескопических элементов амплитуда перемещения конечной телескопической выдвижной штанги увеличивается, что недопустимо для управляемой высокоточной технологии ведения работ по горизонтальной пристыковки-отстыковки модулей крупногабаритного изделия специального назначения, выполнение которой связано с обеспечением требуемой высокой точности перемещения составных модулей изделия и сохранности стыковочных узлов модулей.
Наиболее близким устройством того же назначения к основному заявленному продукту (устройству) - траверсе горизонтальной стыковки - из заявленной группы изобретений по технической сущности, достигаемому результату и по совокупности признаков является траверса горизонтальной стыковки, включающая грузоподъемник с крюком для подвешивания несущей балки траверсы, механизм балансировки траверсы, содержащий блок задания нагрузки с упругим элементом, установленные с возможностью регулирования равновесия несущей балки траверсы (см. авт. св-во СССР №1242455, МПК4 В66С 1/68, 1984, принято за прототип).
Наиболее близким устройством того же назначения к заявленному продукту (устройству) - блоку задания нагрузки механизма балансировки траверсы - из заявленной группы изобретений по технической сущности, достигаемому результату и по совокупности признаков является блок задания нагрузки механизма балансировки траверсы, включающий упругий элемент и поворотный рычажный элемент, установленный с возможностью управляемого углового поворота при взаимодействии с упругим элементом до достижения равновесной нагрузки несущей балки траверсы (см. авт. св-во СССР №1242455, МПК4 В66С 1/68, 1984, принято за прототип).
Наиболее близким устройством того же назначения к заявленному продукту (устройству) - блоку компенсации вектора нагрузки механизма балансировки траверсы - из заявленной группы изобретений по технической сущности, достигаемому результату и по совокупности признаков является блок компенсации вектора нагрузки механизма балансировки траверсы, установленный в корпусе с возможностью изменения собственных линейных параметров при изменении параметров нагружения траверсы (см. авт. св-во СССР №1242455, МПК4 В66С 1/68, 1984, принято за прототип).
В источнике информации, принятом за прототип, функции упомянутых блоков механизма балансировки траверсы, именно блока задания нагрузки (в описании к прототипу он указан как "балансирный механизм") известной траверсы, выполняют двуплечие и неравноплечие рычаги с роликами, работающие совместно с упругим элементом (пружина сжатия), см. описание к авт. св-ву СССР №1242455.
Наиболее близким способом того же назначения к заявленному способу настройки балансировки траверсы из заявленной группы изобретений по технической сущности, достигаемому результаты и по совокупности признаков является способ настройки балансировки траверсы, включающий поэтапное уравновешивание силового воздействия на стык пары "изделие-модуль изделия" с последующей отстыковкой траверсой модуля от изделия (см. авт. св-во СССР №1242455, МПК4 В66С 1/68, 1984, принято за прототип).
В источнике информации, принятом за прототип (цитата из описания к прототипу): "перед тем, как приступить к работе с траверсой ее предварительно настраивают, т.е тарируют на тот вес груза, с которым в дальнейшем производится работа".
Настройка траверсы в прототипе производится отличающимся от заявленного способом.
К основным недостаткам траверсы, принятой за прототип, является следующее.
1. Траверсу известной конструкции настраивают на конкретный вес стыковываемого (отстыковываемого) модуля изделия. Для работы с грузами различного веса (массы) в траверсе не предусмотрено устройства, которое позволяло бы изменять рабочую нагрузку пружин для настройки траверсы на необходимый вес изделия.
2. "Взятие веса" отстыковываемого (пристыковываемого) модуля, т.е. обеспечение нормированного натяжения грузозахватных стропов (установка стрелки в "нулевое положение") в траверсе известной конструкции производится с помощью подъемного механизма крана. Это требует очень точного вертикального позиционирования кранового крюка, что, в свою очередь, даже при небольшой допустимой нагрузке на направляющие штыри (при малой амплитуде отклонения стрелки) приводит к необходимости наличия дополнительного механизма подъема для выполнения такой работы крана, что ограничивает возможности использования траверсы такой конструкции.
3. Натяжение грузозахватных стропов траверсы с помощью крана является небезопасным, так как по разным причинам, например из-за ошибки оператора или из-за естественной задержки во времени, либо по другим техническим или технологическим причинам, при выполнении операции остановки крюка после принятия команды "стоп" и пр. - что может привести к возникновению нагрузок, превышающих допустимые величины как для самой траверсы, так и для отстыковываемого (пристыковываемого) модуля изделия.
4. В траверсе рассматриваемой известной конструкции не предусмотрена возможность компенсации погрешности взаимной ориентации модулей изделия, например, при стыковке двух сверхгабаритных модулей уникального изделия специального назначения, что, в свою очередь, может привести либо к усложнению процесса сборки изделия, либо к недопустимым нагрузкам на стыковочные узлы обоих модулей изделия и их повреждению.
При организации работ по стыковке сверхгабаритных грузов для точного позиционирования необходима возможность микроскоростного перемещения механизма подъема крана.
Сущность заявленной группы изобретений заключается в следующем.
Единая задача, на решение которой направлена заявленная группа изобретений, - расширение возможности проведения горизонтальных отстыковочных операций негабаритных составных частей изделия специального назначения при обеспечении безопасности перемещения многотонных модулей за счет стабилизации надежности параметров такелажных работ.
Единый технический результат, который достигается при осуществлении заявленной группы изобретений, - обеспечение сохранности стыковочного узла пары "изделие - модуль изделия" при проведении пристыковочно-отстыковочных операций изделия за счет предохранения его от повреждений путем уравновешивания силового воздействия на стыковочный узел пары и гашения колебаний и вибраций при проведении такелажных работ с уникальными многотонными изделиями.
Указанные единая задача и единый технический результат, на решение и достижение которых направлена заявленная группа изобретений, достигаются всей совокупностью существенных признаков, изложенных в каждом из заявленных объектов, объединенных единым изобретательским замыслом, в формулах группы изобретений: как для формулы группы изобретений траверсы горизонтальной стыковки в целом, так и формулы группы изобретений блока задания нагрузки механизма балансировки траверсы, а также в формуле группы изобретений блока компенсации вектора нагрузки механизма балансировки траверсы, кроме того, в формуле группы изобретений для способа настройки балансировки траверсы.
Указанный единый технический результат при осуществлении группы изобретений по основному объекту-устройству - траверсе горизонтальной стыковки - достигается тем, что в известной конструкции траверсы горизонтальной стыковки, включающей грузоподъемник с крюком для подвешивания несущей балки траверсы, механизм балансировки траверсы, содержащий блок задания нагрузки с упругим элементом, установленные с возможностью регулирования равновесия несущей балки траверсы, механизм балансировки траверсы дополнительно снабжен парой блоков компенсации вектора нагрузки, установленных с возможностью кинематического уравновешивающего взаимодействия с блоком задания нагрузки, причем последний установлен между крюком грузоподъемника и несущей балкой траверсы, а каждый из пары блоков компенсации вектора нагрузки закреплен на концах несущей балки траверсы.
При этом, при наличии на концах несущей балки траверсы парных грузозахватных приспособлений каждый из пары блоков компенсации вектора нагрузки линейно встроен в каждое из указанных грузозахватных приспособлений с образованием в каждом из последних кинематической цепи подвеса груза.
Указанный единый технический результат при осуществлении группы изобретений по объекту-устройству - блоку задания нагрузки - достигается тем, что, в известной конструкции блока задания нагрузки механизма балансировки траверсы, включающей упругий элемент и поворотный рычажный элемент, установленный с возможностью управляемого углового поворота при взаимодействии с упругим элементом до достижения равновесной нагрузки несущей балки траверсы, упругий элемент блока задания нагрузки выполнен в виде кинематической пары вертикально расположенных поворотных звеньев, каждое из которых содержит по две пары установленных на общей втулке звена радиальных подшипников качения, причем каждая из двух равных между собой указанных втулок каждого поворотного звена выполнена с плавно изменяемой по замкнутой окружности каждой втулки толщиной стенки с образованием эксцентриситета, при этом общая втулка одного из поворотных звеньев кинематически связана с поворотным рычажным элементом, а обе указанных втулки пары поворотных звеньев кинематически связаны между собой и несущей балкой траверсы соединительной скобой.
Причем, в блоке задания нагрузки общая втулка верхнего из пары вертикально установленных звеньев кинематически связана с поворотным рычажным элементом.
Указанный единый технический результат при осуществлении группы изобретений по объекту-устройству - блоку компенсации вектора нагрузки - достигается тем, что, в известной конструкции блока компенсации вектора нагрузки механизма балансировки траверсы, установленного в корпусе с возможностью изменения линейных параметров рабочего элемента при изменении параметров нагружения траверсы, рабочий элемент блока компенсации вектора нагрузки выполнен в виде шарнирного четырехзвенного механизма, установленного с возможностью изменения расстояния между противоположными шарнирами последнего, при этом верхний и нижний шарниры одноименных пар звеньев линейно встроены в кинематическую цепь подвеса груза, один из пары средних шарниров неподвижно установлен в блоке компенсации вектора нагрузки, а второй из пары средних шарниров кинематически связан со штоком изменения расстояния между парой средних шарниров и установлен подвижно с возможностью возвратно-поступательного перемещения относительно неподвижного парного шарнира.
При этом, блок компенсации вектора нагрузки механизма балансировки снабжен направляющей для возвратно-поступательного перемещения подвижного шарнира, в последнем установлена втулка для взаимодействия со штоком изменения расстояния между парой средних шарниров, причем сопряжение втулки и штока выполнено резьбовым.
Указанный единый технический результат при осуществлении группы изобретений по объекту-способу достигается тем, что в известном способе настойки балансировки траверсы, включающем поэтапное уравновешивание силового воздействия на стык пары "изделие - модуль изделия" с последующей отстыковкой траверсой модуля от изделия, на первом этапе настройки изменением положения противовеса на рычаге блока задания нагрузки механизма балансировки формируют усилие, равное по величине весу модуля и противоположное по направлению, после чего в этой точке рычага противовес фиксируют, а на втором этапе прикрепляют несущую балку траверсы к модулю изделия и регулированием линейных параметров рабочих элементов каждого из парных блоков компенсации вектора нагрузки механизма балансировки переносят заданное на первом этапе настройки усилие к такелажным точкам модуля изделия.
При этом, на первом этапе величину формируемого усилия на первом этапе настройке, равного по величине весу модуля, определяют по зависимости:
Q×f=q×F,
где Q - вес отстыковываемого модуля,
f - плечо веса отстыковываемого модуля,
q - вес противовеса поворотного рычажного элемента,
F - плечо противовеса поворотного рычажного элемента,
f, q - постоянные параметры, характеризующие блок задания нагрузки механизма балансировки траверсы,
Q, F - переменные параметры.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленной группы изобретений как для объектов-устройств, так и для объекта-способа, позволил установить, что заявителем не обнаружены как известные способы (технологии), так и устройства, характеризующиеся признаками, идентичными всем существенным признакам как способа, так и устройств заявленной группы изобретений. При этом определение прототипа как наиболее близкого из перечня выявленных аналогов по совокупности признаков как для заявленного в группе изобретений способа, так и для заявленных в группе изобретений устройств, позволил выявить совокупность существенных, по отношению к усматриваемому заявителем единому техническому результату для решения единой задачи, отличительных признаков для каждого из заявленных объектов, изложенных в формуле группы изобретений.
Следовательно, каждый из объектов заявленной группы изобретений соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия каждого из объектов заявленной группы изобретений, объединенных единым общим изобретательским замыслом, требованию изобретательского уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от выбранных прототипов признаками для каждого из объектов заявленной группы изобретений.
Результаты проведенного заявителем дополнительного поиска показывают, что каждый из объектов заявленной группы изобретений не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками каждого из объектов заявленной группы изобретений преобразований на достижение усматриваемого заявителем единого технического результата, в частности в каждом из объектов заявленной группы изобретений не предусматриваются следующие преобразования:
- дополнение известного средства какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно таких дополнений;
- замена какой-либо части известного средства другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такой замены;
- исключение какой-либо части средства с одновременным исключением обусловленной ее наличием функции и достижением при этом обычного для такого исключения результата;
- увеличение количества однотипных элементов для усиления технического результата, обусловленного наличием в средстве именно таких элементов;
- выполнение известного средства или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого объекта и связей между ними.
Следовательно, каждый из объектов заявленной группы изобретений соответствует требованию "изобретательский уровень" по действующему законодательству.
В комплект траверсы с ее механизмами входят составные части, обозначенные на чертежах, где изображено:
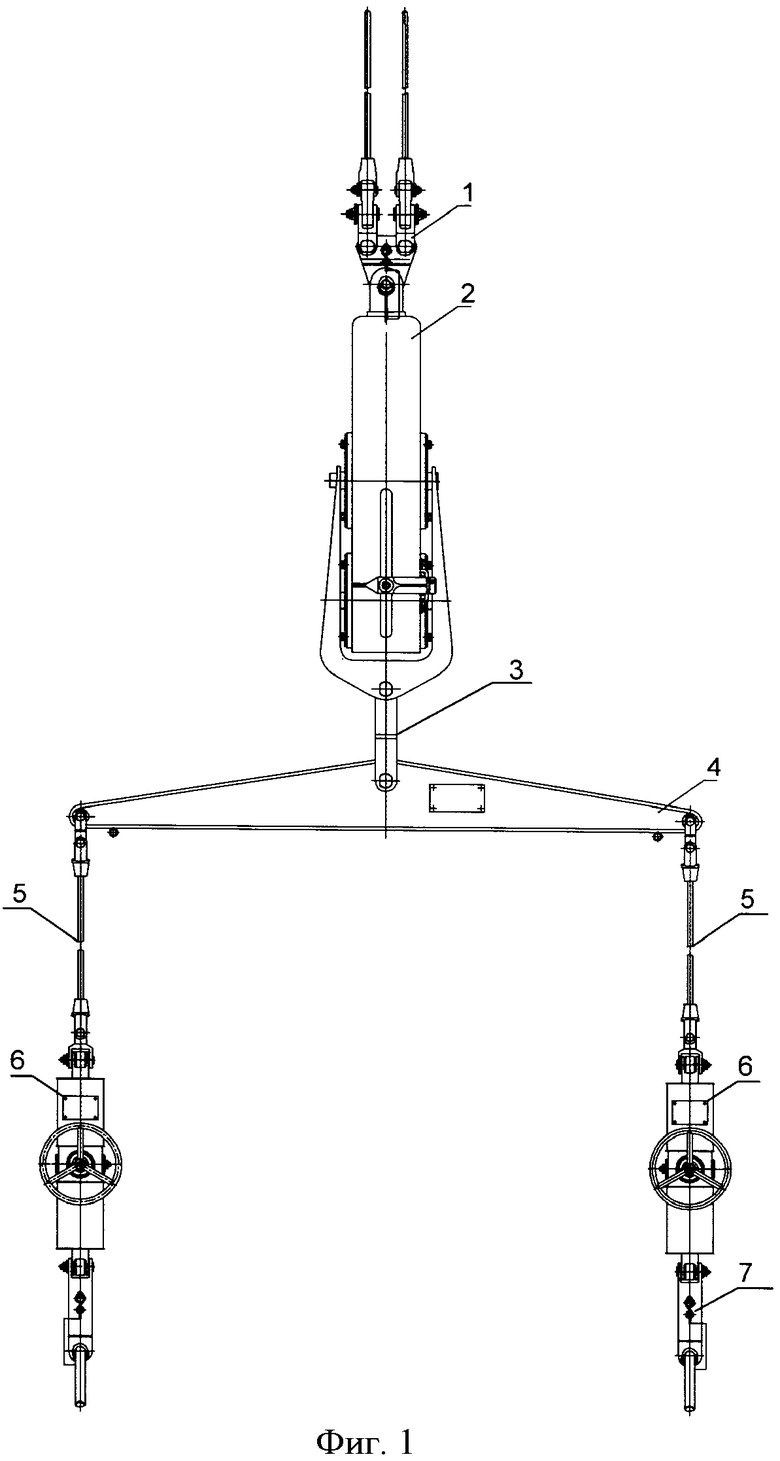
фиг.1 - траверса горизонтальной стыковки в сборе;
фиг.2 - принципиальная кинематическая схема блоков механизма балансировки траверсы;
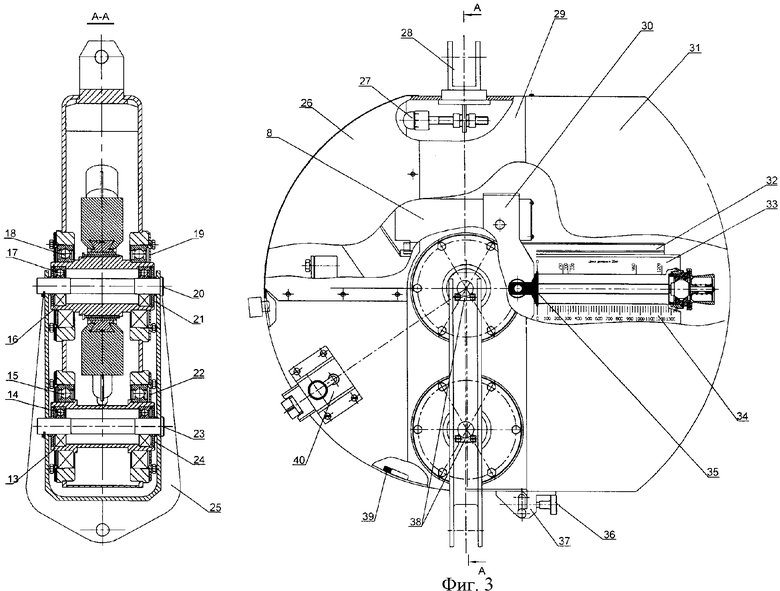
фиг.3 - конструктивная схема блока задания нагрузки механизма балансировки;
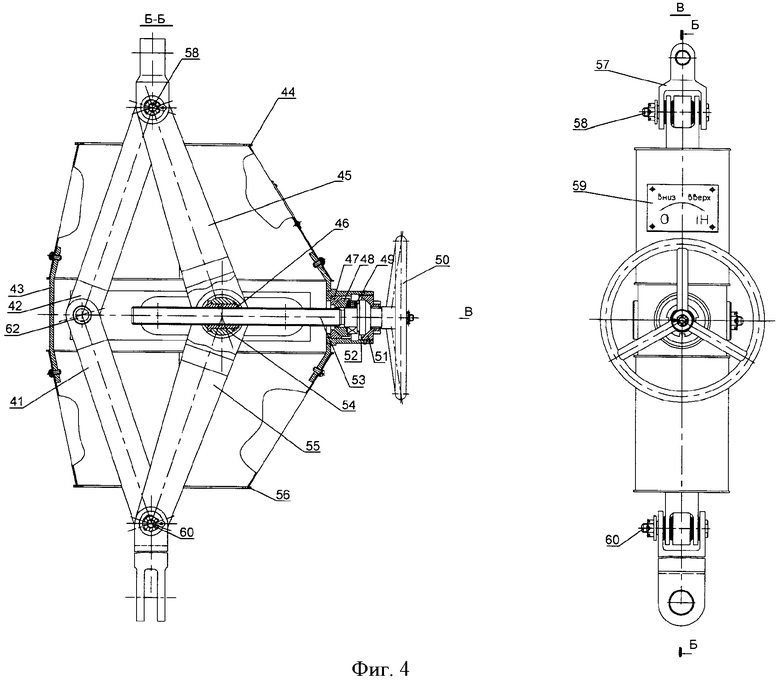
фиг.4 - конструктивная схема блока компенсации вектора нагрузки механизма балансировки;
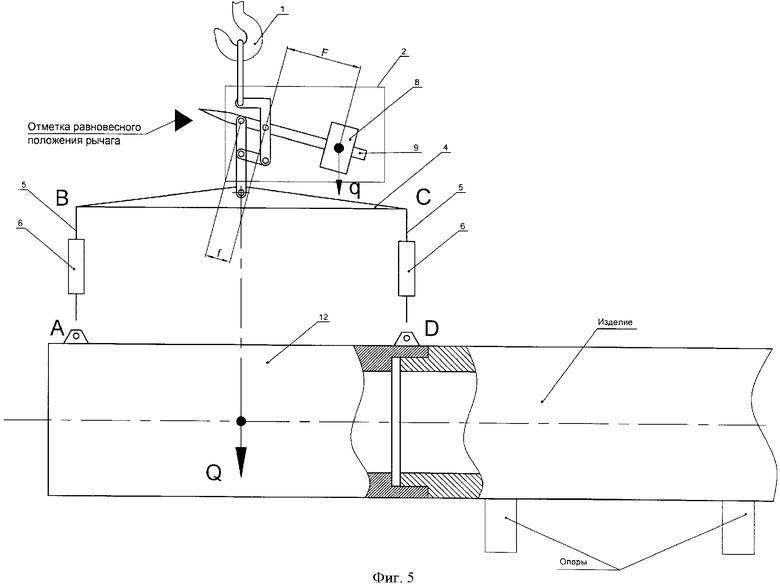
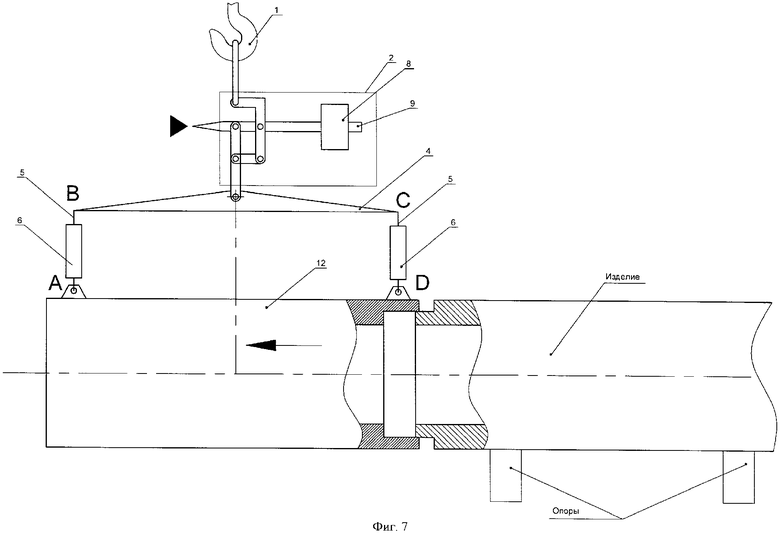
фиг.5-7 - принципиальные кинематические схемы последовательных этапов работы механизма балансировки траверсы.
На чертежах позициями обозначены:
1 - подвеска крюка грузоподъемника;
2 - блок задания нагрузки механизма балансировки траверсы;
3 - переходник подвески несущей балки траверсы к блоку задания нагрузки;
4 - несущая балка траверсы;
5 - парный строп несущей балки траверсы;
6 - парный блок компенсации вектора нагрузки механизма балансировки траверсы;
7 - парное такелажное средство грузозахватного органа траверсы;
8 - противовес поворотного рычажного элемента;
9 - поворотный рычажный элемент блока задания нагрузки механизма балансировки траверсы;
10 - кинематическая пара поворотных эксцентриситетных звеньев блока задания нагрузки;
11 - соединительная скоба;
12 - отстыковываемый (стыкуемый) модуль изделия;
13, 16 - втулка поворотного звена кинематической пары блока задания нагрузки;
14, 15, 17, 18 - подшипник качения;
19. 22 - защитная крышка подшипника;
20. 23 - ось поворота кинематической пары звеньев;
21. 24 - заглушка;
25, 30 - скоба крепления блока задания нагрузки;
26 - защитный кожух блока задания нагрузки;
27, 39 - ограничительный упор;
28 - вилка крепления блока задания нагрузки к подвеске крюка грузоподъемника;
29 - корпус блока задания нагрузки механизма балансировки;
31 - откидывающаяся крышка кожуха;
32 - балка поворотного рычажного элемента;
33, 34 - линейка-указатель перемещения противовеса;
35 - указатель веса модуля;
36 - крепежный винт кожуха;
37 - крепежная петля кожуха;
38 - ригели оси поворота кинематической пары звеньев;
40 - замок;
41, 42, 45, 55 - звено рабочего элемента шарнирного четырехзвенного исполнительного механизма блока компенсации вектора нагрузки;
43 - направляющая для перемещения штоком 53 шарнира 54;
44, 56 - кожух блока компенсации вектора нагрузки;
46 - втулка резьбовая в перемещаемом шарнире 54 пары звеньев;
47 - шайба;
48 - вкладыш;
49 - подшипник;
50 - штурвал;
51 - гайка;
52 - защитный стакан;
53 - шток резьбовой для изменения расстояния между средними шарнирами 54 и 62;
54, 58, 60, 62 - шарниры рабочего элемента четырехзвенного исполнительного механизма блока компенсации вектора нагрузки;
57 - переходник для установки блока компенсации вектора нагрузки;
59 - табличка.
Сведения, подтверждающие возможность осуществления изобретений в соответствии с объектами заявленной группы изобретений, объединенных единым общим изобретательским замыслом, заключаются в следующем.
Траверса (фиг.1) состоит из несущей балки 4, закрепленной на подвеске 1 крюка грузоподъемника, механизма балансировки, содержащего блок задания нагрузки 2, и парных блоков компенсации вектора нагрузки 6.
Несущая балка 4 (фиг.1, 2) траверсы представляет собой сварную металлоконструкцию в виде вытянутого равнобедренного треугольника.
В центральной части несущей балки 4 траверсы может быть шарнирно смонтирован переходник 3 подвески несущей балки, с помощью которого подвеска соединяется с блоком 2 (фиг.1, 2) задания нагрузки механизма балансировки траверсы.
На концах несущей балки 4 траверсы могут быть шарнирно смонтированы парные стропы 5 (фиг.1, 2), при этом каждый из парных блоков 6 (фиг.1, 2) компенсации вектора нагрузки закреплен на конце несущей балки траверсы, которые, в свою очередь, соединены с парными такелажными средствами 7.
При отсутствии необходимости в навешивании стропов 5 каждый из парных блоков 6 компенсации вектора нагрузки механизма балансировки может быть закреплен непосредственно к каждому из концов несущей балки траверсы.
При наличии на концах несущей балки 4 траверсы парных грузозахватных приспособлений каждый из парных блоков 6 компенсации вектора нагрузки может быть линейно встроен в каждое из указанных приспособлений с образованием в каждом из последних кинематической цепи подвеса груза.
Таким образом, блоки механизма балансировки несущей балки траверсы - блок 2 (фиг.1) задания нагрузки и парные блоки 6 (фиг.1) компенсации вектора нагрузки, установлены как для кинематического взаимодействия как между собой, так и с несущей балкой 4 (фиг.1) траверсы и с перемещаемым модулем 12 (фиг.5-7) изделия. При этом блок задания нагрузки 2 (фиг.1) установлен между подвеской 1 (фиг.1) крюка грузоподъемника и несущей балкой 4 (фиг.1) траверсы, а каждый из парных блоков 6 (фиг.1) компенсации вектора нагрузки закреплен прямо или опосредовано - через стропы 5 (фиг.1) или такелажные средства 7 (фиг.1) на концах несущей балки траверсы.
Конструктивная схема блока задания нагрузки 2 (фиг.1) механизма балансировки траверсы представлена на фиг 3.
Блок задания нагрузки (фиг.3) состоит из следующих основных элементов и узлов: втулок 13, 16 поворотного звена кинематической пары блока задания нагрузки; подшипников качения 14, 15, 17, 18; защитных крышек 19, 22; осей поворота 20, 23 кинематической пары звеньев; заглушек 21, 24; скоб крепления 25, 30 блока задания нагрузки; защитного кожуха 26 блока задания нагрузки; откидывающейся крышки 31 кожуха; ограничительных упоров 27, 39; вилки 28 крепления блока задания нагрузки к подвеске крюка грузоподъемника; корпуса 29 блока задания нагрузки механизма балансировки; балки 32 поворотного рычажного элемента; линеек-указателей 33, 34 перемещения противовеса; указателя 35 веса модуля; крепежного винта 36 кожуха; крепежной петли 37 кожуха; ригелей 38 осей поворота кинематической пары звеньев и замка 40.
Упругий элемент блока задания нагрузки 2 (фиг.2) в заявленной группе изобретений, объединенных единым общим изобретательским замыслом, в отличие от прототипа (в котором в качестве упругого неуправляемого элемента установлена пружина) выполнен в виде кинематической пары вертикально расположенных поворотных звеньев в виде пар радиальных подшипников качения 14, 15 и 17, 18 (фиг.3), установленных на осях 20 и 23 (фиг.3).
Каждая из двух равных между собой (в т.ч. и по параметрам образованного эксцентриситета) втулок (см. поз.10 на фиг.2, или поз.13, 16 на фиг.3), общих для каждой пары соосных подшипников, выполнена с плавно изменяемой по замкнутой окружности каждой общей втулки толщиной стенки с образованием эксцентриситета с плечом, равным "f".
Причем общая втулка одного из поворотных звеньев, например верхнего (фиг.2), кинематически связана с поворотным рычажным элементом 9 (фиг.2), на котором с возможностью фиксированного перемещения на рычажном элементе (например, с винтовой или иного вида запорной фиксацией положения противовеса на поворотном рычажном элементе 9) установлен противовес 8 (фиг.2).
Обе указанных эксцентриковых втулки пары поворотных звеньев кинематически связаны между собой и несущей балкой траверсы соединительной скобой 11 (фиг.2).
Каждая из втулок 13, 16 (фиг.3) установлена в корпусе блока 29 (фиг.3) на двух парах подшипников качения 15 и 18 (фиг.3). В отверстиях указанных втулок, также на двух парах подшипников 14 и 17 (фиг.3), установлены оси 20, 23 (фиг.3) поворота кинематических пар звеньев.
Втулки 13 и 16 имеют отверстия, по форме выполненные с образованием равного осевого смещения - эксцентриситета, величина которого определяется расчетным путем.
С осями 20 и 23 поворота кинематической пары звеньев кинематически соединена скоба 25 (фиг.3) крепления блока задания нагрузки, выполненная в виде вилки. В свою очередь скоба 25 шарнирно соединена с переходником подвески 3 (фиг.1) подвески несущей балки 4 траверсы.
Полости подшипников 14, 15 и 17, 18 (фиг.3) закрыты торцевыми заглушками 21, 24 (фиг.3).
В корпусе 29 (фиг.3) блока задания нагрузки механизма балансировки установлена балка 32 поворотного рычажного элемента с линейкой точной фиксации груза.
На корпусе 29 (фиг.3) блока задания нагрузки также установлен замок 40, предназначенный для фиксации балки 32 поворотного рычажного элемента относительно корпуса 29 блока задания нагрузки механизма балансировки траверсы.
Кроме этого, на корпусе 29 блока задания нагрузки смонтированы защитный кожух 26 и откидывающаяся крышка 31, предохраняющие детали балки 32 поворотного рычажного элемента блока задания нагрузки от механических повреждений и попадания грязи.
Внутри полости защитного кожуха 26 смонтированы ограничительные упоры 27 и 39, предназначенные для ограничения угла поворота балки 32 поворотного рычажного элемента. Упоры могут быть оборудованы демпфирующими элементами.
Конструктивная схема одного из равных между собой парных блоков 6 (фиг.1, 2) компенсации вектора нагрузки механизма балансировки траверсы представлена на фиг.4.
Каждый из парных блоков компенсации вектора нагрузки состоит из следующих основных и вспомогательных элементов и узлов:
- шарнирно соединенных между собой звеньев 41, 42, 45, 55 (фиг.4), образующих рабочий элемент шарнирного четырехзвенного исполнительного механизма блока компенсации вектора нагрузки;
- направляющей 43 для перемещения штоком 53 шарнира 54;
- кожухов 44, 56 блока компенсации вектора нагрузки;
- резьбовой втулки 46, закрепленной в перемещаемом шарнире 54 пары звеньев 45, 55;
- шайбы 47; вкладыша 48; подшипника 49; штурвала 50; гайки 51; защитного стакана 52;
- резьбового штока 53, взаимодействующего с резьбовой втулкой 46 для перемещения подвижно установленного шарнира 54 относительно неподвижно закрепленного шарнира 62;
- шарниров 54, 58, 60, 62 рабочего элемента четырехзвенного исполнительного механизма блока компенсации вектора нагрузки;
- переходника 57 для установки блока компенсации вектора нагрузки и указательной таблички 59.
Повторно указывая на один из основных узлов каждого из парных блоков компенсации вектора нагрузки механизма балансировки траверсы заявленной группы изобретений, можно еще раз выделить, что каждый из парных блоков компенсации вектора нагрузки снабжен направляющей 43 (фиг.4) и штоком 53 для возвратно-поступательного перемещения подвижного шарнира 54, причем сопряжение указанного подвижного шарнира 54 (например, втулки этого шарнира) и штока 53 выполнено резьбовым.
Таким образом, рабочий элемент каждого из парных блоков 6 (фиг.1, 2) компенсации вектора нагрузки представляет собой талреп, который выполнен в виде шарнирного четырехзвенного механизма, образующего ромбовидную фигуру, установленного в кожухе 44, 56 (фиг.4) блока 6 (фиг.1, 2) компенсации вектора нагрузки.
Непосредственно сам шарнирный четырехзвенный механизм рабочего элемента каждого из парных блоков компенсации вектора нагрузки выполнен из плоских стальных звеньев 41, 42, 45, 55 (фиг.4), сопряженных между собой шарнирами 54, 58, 60, 62 (фиг.4) с образованием ромбовидной фигуры.
Звенья 41, 42, 45, 55 с шарнирами 54, 58, 60, 62 четырехзвенного механизма рабочего элемента не образуют жесткую неподвижную фигуру, а установлены с возможностью изменения расстояния между противоположными шарнирами вершин ромбовидной фигуры.
Причем верхний 58 и нижний 60 шарниры (фиг.4) соответственно одноименных пар звеньев 42 и 45 - верхние звенья и 41, 55 - нижние звенья, линейно встроены в кинематическую цепь подвеса груза (не показано).
Один шарнир 62 из пары средних шарниров 54 и 62 (фиг.4) неподвижно закреплен в блоке компенсации вектора нагрузки, а второй шарнир 54 из указанной пары средних шарниров, посредством резьбовой втулки 46, закрепленной в этом шарнире 54, кинематически связан посредством образованной винтовой пары с резьбовым штоком 53 изменения расстояния между средними шарнирами 54 и 62.
Таким образом, шарнир 54 с закрепленной в нем резьбовой втулкой 46 установлен в направляющей 43 подвижно с возможностью возвратно-поступательного перемещения резьбовым штоком 53 в указанной направляющей 43 относительно закрепленного шарнира 62.
Технологию поэтапной настройки балансировки траверсы осуществляют следующим образом (фиг.5-7).
На первом этапе настройки формирование усилия, равного по величине весу отстыковываемого модуля 12 и противоположного по направлению, производят в блоке 2 (фиг.5) задания нагрузки механизма балансировки траверсы.
Величину формируемого усилия определяет конкретно задаваемое плечо F противовеса 8 (фиг.5), перемещаемого по балке поворотного рычажного элемента 9 (фиг.5).
Формирование расчетного усилия производят при открытой крышке кожуха 31 (фиг.3) блока задания нагрузки. Для поднятия крышки кожуха 31 крепежным винтом 36 (фиг.3) кожуха расфиксируют крепежную петлю 37 (фиг.3) кожуха и при помощи винтовой пары (на фиг. не показана) перемещают скобу 30 (фиг.3) и сопряженный с ней противовес 8 (фиг.2) по балке 32 (фиг.3) поворотного рычажного элемента.
Положение противовеса 8 на балке и соответствующее ему значение веса модуля отстыковываемого изделия можно контролировать, например, как датчиками положения (на фиг. не показаны) - при использования автоматизированной системы настройки балансировки, так и визуально - с помощью отсчетных приспособлений, например линейки-указателя 33-34 (фиг.3) перемещения противовеса.
На втором этапе настройки несущую балку 4 (фиг.6) траверсы подают грузоподъемником к отстыковываемому модулю 12 (фиг.6) изделия и подвешивают непосредственно над такелажными узлами модуля А и D.
Затем при помощи парных блоков 6 (фиг.6) компенсации вектора нагрузки, например вручную - поочередным вращением штурвалов 50 (фиг.4), следуя указанию на табличке 59 (фиг.4) "вниз" или "вверх", либо в автоматическом режиме (не показано).
Далее подводят парные такелажные средства грузозахватного органа траверсы 7 (фиг.1) до положения, обеспечивающего их соединение с такелажными узлами А и D отстыковываемого модуля 12 изделия, и прикрепляют несущую балку траверсы к модулю.
После этого осуществляют поочередное регулирование линейных параметров рабочих элементов каждого из парных блоков 6 компенсации вектора нагрузки механизма балансировки. Для этого автоматически (не показано) или вручную - с помощью вращения штурвала 50 (фиг.4), кинематически сопряженного с винтовым штоком 53 (фиг.4), перемещают в каждом блоке подвижный шарнир 54 (фиг.4).
Тем самым осуществляют "перенос" к такелажным точкам модуля 12 усилия, сформированного на первом этапе настройки балансировки траверсы в блоке задания нагрузки 2 (фиг.6). Момент полного переноса усилия фиксируют по равновесному положению поворотного рычажного элемента 9 с противовесом 8 (фиг.1, 2; фиг.6).
После этого "обезвешенный" вышеуказанными операциями многотонный модуль 12 (фиг.7) изделия безопасно отстыковывают от крупногабаритного изделия перемещением грузоподъемника по горизонтали.
Настройка балансировки несущей балки траверсы в процессе работы может проводиться как в ручном режиме, т.е. посредством поэтапной ручной регулировочной настройки по вышеописанной технологии, так и в автоматическом режиме - посредством, например, созданной программы для автоматического управления и настройки балансировки траверсы.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании объектов заявленной группы изобретений следующей совокупности условий:
- единая задача, на решение которой направлена заявленная группа изобретений - расширение возможности проведения горизонтальных отстыковочных операций, проводимых с модулями негабаритных изделий специального назначения при обеспечении безопасности перемещения многотонных модулей за счет обеспечения стабилизации надежности балансировки параметров при такелажных работах;
- единый технический результат, который достигается при осуществлении заявленной группы изобретений - обеспечение сохранности стыковочного узла пары "изделие - модуль изделия" при проведении пристыковочно-отстыковочных операций изделия за счет предохранения его от повреждений путем уравновешивания силового воздействия на стыковочный узел пары и гашения колебаний и вибраций при проведении такелажных работ с уникальными многотонными изделиями;
- средства, воплощающие объекты заявленной группы изобретений при их осуществлении, предназначены для использования в промышленности, именно для стыковочных крановых операций с многотонными негабаритными изделиями специального назначения;
- для заявленной группы изобретений, объединенных единым общим изобретательским замыслом в том виде, как она охарактеризована в независимых пунктах нижеизложенной формулы изобретения, подтверждена возможность ее осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
- средства, воплощающие заявленную группу изобретений, при их осуществлении способны обеспечить достижение изложенного заявителем технического результата.
Следовательно, заявленная группа изобретений, объединенная единым общим изобретательским замыслом, соответствует требованию "промышленная применимость" по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| ТРАВЕРСА | 2006 |
|
RU2329942C2 |
| ТРАВЕРСА | 2012 |
|
RU2526308C2 |
| Балансирная траверса В.С.Левадного | 1985 |
|
SU1310326A1 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| ЦЕПНОЙ ПОДВЕС | 2012 |
|
RU2511761C1 |
| СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2341447C1 |
| ТРАВЕРСА ДЛЯ СТЫКОВКИ КРУПНОГАБАРИТНОГО КОСМИЧЕСКОГО АППАРАТА С РАКЕТОЙ-НОСИТЕЛЕМ, СНАБЖЕННОЙ НАДКАЛИБЕРНЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ | 2007 |
|
RU2362724C2 |


Изобретение относится к подъемно-транспортному оборудованию. Траверса состоит из узла подвески траверсы к крюку кранового оборудования, несущей балки траверсы, механизма балансировки траверсы, содержащего блок задания нагрузки и парные блоки компенсации вектора нагрузки. Блок задания нагрузки содержит противовес, установленный на поворотном рычажном элементе, выполненном по принципу неравноплечего рычага, соединенного с несущей балкой траверсы. В конструкции блока задания нагрузки предусмотрен замок, закрепляющий поворотный рычажный элемент в равновесном положении, что позволяет траверсе работать как обычное грузозахватное средство. Талрепы парных блоков компенсации вектора нагрузки предназначены для изменения расстояния между точками, что ведет к созданию натяжения в стропах подвески и достижению усилия на малом плече, уравновешивающего поворотный рычажный элемент блока задания нагрузки. Равновесие может контролироваться визуально - совмещением стрелки с соответствующей этому положению отметкой либо с помощью штатных приборов в автоматическом режиме. Достигается обеспечение сохранности стыковочного узла пары «изделие - модуль изделия» при проведении пристыковочно-отстыковочных операций. 4 н. и 4 з.п. ф-лы, 7 ил.
1. Траверса горизонтальной стыковки, включающая грузоподъемник с крюком для подвешивания несущей балки траверсы, механизм балансировки траверсы, содержащий блок задания нагрузки с упругим элементом, установленные с возможностью регулирования равновесия несущей балки траверсы, отличающаяся тем, что механизм балансировки траверсы дополнительно снабжен парой блоков компенсации вектора нагрузки, установленной с возможностью кинематического уравновешивающего взаимодействия с блоком задания нагрузки, причем последний установлен между крюком грузоподъемника и несущей балкой траверсы, а каждый из пары блоков компенсации вектора нагрузки закреплен на концах несущей балки траверсы.
2. Траверса по п.1, отличающаяся тем, что при наличии на концах несущей балки траверсы парных грузозахватных приспособлений, каждый из пары блоков компенсации вектора нагрузки линейно встроен в каждое из указанных приспособлений с образованием в каждом из последних кинематической цепи подвеса груза.
3. Блок задания нагрузки механизма балансировки траверсы, включающий упругий элемент и поворотный рычажный элемент, установленный с возможностью управляемого углового поворота при взаимодействии с упругим элементом до достижения равновесной нагрузки несущей балки траверсы, отличающийся тем, что упругий элемент блока задания нагрузки выполнен в виде кинематической пары вертикально расположенных поворотных звеньев, каждое из которых содержит по две пары установленных на общей втулке звена радиальных подшипников качения, причем каждая из двух равных между собой указанных втулок каждого поворотного звена выполнена с плавно изменяемой по замкнутой окружности каждой втулки толщиной стенки, с образованием эксцентриситета, при этом общая втулка одного из поворотных звеньев кинематически связана с поворотным рычажным элементом, а обе указанных втулки пары поворотных звеньев кинематически связаны между собой и несущей балкой траверсы соединительной скобой.
4. Блок задания нагрузки по п.3, отличающийся тем, что общая втулка верхнего из пары вертикально установленных звеньев кинематически связана с поворотным рычажным элементом.
5. Блок компенсации вектора нагрузки механизма балансировки траверсы, установленный с возможностью изменения линейных параметров рабочего элемента при изменении параметров нагружения траверсы, отличающийся тем, что рабочий элемент блока компенсации вектора нагрузки выполнен в виде шарнирного четырехзвенного механизма, установленного с возможностью изменения расстояния между противоположными шарнирами последнего, при этом верхний и нижний шарниры одноименных пар звеньев линейно встроены в кинематическую цепь подвеса груза, один из пары средних шарниров неподвижно установлен в блоке компенсации вектора нагрузки, а второй из пары средних шарниров кинематически связан со штоком изменения расстояния между парой средних шарниров и установлен подвижно с возможностью возвратно-поступательного перемещения относительно неподвижного парного шарнира.
6. Блок компенсации вектора нагрузки по п.5, отличающийся тем, что блок снабжен направляющей для возвратно-поступательного перемещения подвижного шарнира, в последнем установлена втулка для взаимодействия со штоком изменения расстояния между парой средних шарниров, причем сопряжение втулки и штока выполнено резьбовым.
7. Способ настройки балансировки траверсы, включающий поэтапное уравновешивание силового воздействия на стык пары "изделие - модуль изделия" с последующей отстыковкой траверсой модуля от изделия, отличающийся тем, что на первом этапе настройки изменением положения противовеса на поворотном рычажном элементе блока задания нагрузки механизма балансировки формируют усилие, равное по величине весу модуля и противоположное по направлению, после чего в этой точке поворотного рычажного элемента противовес фиксируют, а на втором этапе прикрепляют несущую балку траверсы к модулю изделия и регулированием линейных параметров рабочих элементов каждого из парных блоков компенсации вектора нагрузки механизма балансировки переносят заданное на первом этапе настройки усилие к такелажным точкам модуля изделия, причем момент уравновешивания силового воздействия на стык пары "изделие - модуль изделия" фиксируют по равновесному положению поворотного рычажного элемента.
8. Способ по п.7, отличающийся тем, что на первом этапе настройки величину формируемого усилия, равного по величине весу модуля, определяют по зависимости:
Q·f=q·F
где Q - вес отстыковываемого модуля,
f - плечо веса отстыковываемого модуля,
q - вес противовеса поворотного рычажного элемента,
F - плечо противовеса поворотного рычажного элемента,
f, q - постоянные параметры, характеризующие блок задания нагрузки
механизма балансировки траверсы,
Q, F - переменные параметры.
| Траверса | 1984 |
|
SU1242455A1 |
| ТРАВЕРСА | 1991 |
|
RU2026257C1 |
| ГРУЗОПОДЪЕМНАЯ ТРАВЕРСА ДЛЯ КРУПНОРАЗМЕРНЫХГРУЗОВ | 0 |
|
SU183353A1 |
| JP 11139751 A, 25.05.1999. | |||

