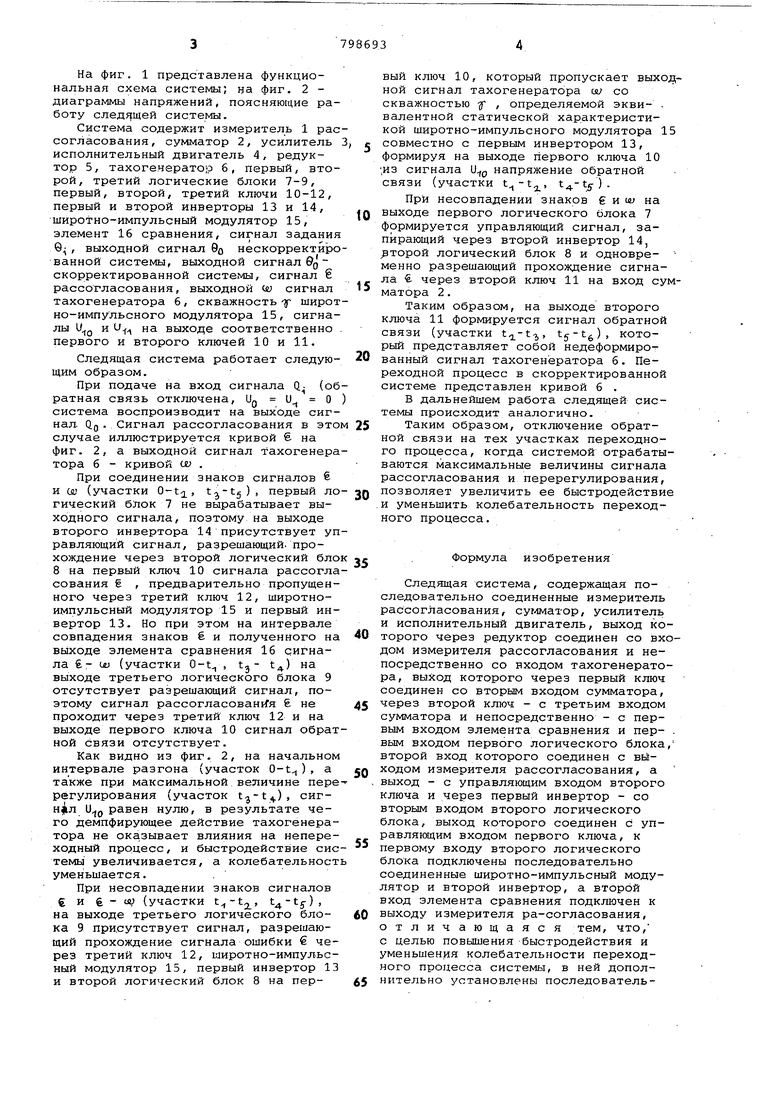
(54) СЛЕДЯЩАЯ СИСТЕМА На фиг. 1 представлена функциональная схема системы; на фиг. 2 диаграммы напряжений, поясняющие работу следующей системы. Система содержит измеритель 1 рас согласования, сумматор 2, усилитель исполнительный двигатель 4, редуктор 5, тахогенератор б, первый, второй, третий логические блоки 7-9, первый, второй, третий ключи 10-12, первый и второй инверторы 13 и 14, широтно-импульсный модулятор 15, элемент 16 сравнения, сигнал задания 0 , выходной сигнал QQ нескорректиро ванной системы, выходной сигнал бд скорректированной системы, сигнал ё рассогласования, выходной to сигнал тахогенератора 6, скважность -у широт но-импульсного модулятора 15, сигналы и и на выходе соответственно первого и второго ключей 10 и 11. Следящая система работает следующим образом. При подаче на вход сигнала Q (об ратная связь отключена, UQ U О система воспроизводит на выходе сигнал. Qg. Сигнал рассогласования в это случае иллюстрируется кривой в на фиг. 2, а выходной сигнал тахогенера тора 6 - кривой ш . При соединении знаков сигналов ё и са; (участки , ), первый ло гический блок 7 не вырабатывает выходного сигнала, поэтому на выходе второго инвертора 14 присутствует уп равляющий сигнал, разрешающий, прохождение через второй логический бло 8 на первый ключ 10 сигнала рассогла сования ё , предварительно пропущенного через третий ключ 12, широтноимпульсный модулятор 15 и первый инвертор 13. Но при этом на интервале совпадения знаков ё и полученного на выходе элемента сравнения 16 сигнала - uj (участки 0-Ц , tg - t) на выходе третьего логического блока 9 отсутствует разрешающий сигнал, поэтому сигнал рассогласован1 я Е не проходит через третий ключ 12 и на выходе первого ключа 10 сигнал обрат ной связи отсутствует. Как видно из фиг. 2, на начальном интервале разгона (участок 0-t), а также при максимальной величине пере регулирования (участок ,), сигн(1л равен нулю, в результате чего демпфирующее действие тахогенератора не оказывает влияния на непереходный процесс, и быстродействие сис темы увеличивается, а колебательност уменьшается. При несовпадении знаков сигналов g и fe - У (участки , ) , на выходе третьего логического блока 9 присутствует сигнал, разрешающий прохождение сигнала ошибки ё через третий ключ 12, широтно-импульсный модулятор 15, первый инвертор 13 и второй логический блок 8 на первый ключ 10, который пропускает выходной сигнал тахогенератора оу со скважностью f , определяемой экви- валентной статической характеристикой широтно-импульсного модулятора 15 совместно с первым инвертором 13, формируя на выходе первого ключа 10 ;из сигнала , напряжение обратной связи (участки .j, )Прй несовпадении знаков g иии на выходе первого логического блока 7 формируется управляющий сигнал, запирающий через второй инвертор 14, второй логический блок 8 и одновре- менно разрешающий прохождение сигнала € через второй ключ 11 на вход сумматора 2. Таким образом, на выходе второго ключа 11 формируется сигнал обратной связи (участки ,,, ), который представляет собой недеформированный сигнал тахогенератора 6. Переходной процесс в скорректированной системе представлен кривой 6 . В дальнейшем работа следящей системы происходит аналогично. Таким образом, отключение обратной связи на тех участках переходного процесса, когда системой отрабатываются максимальные величины сигнала рассогласования и перерегулирования, позволяет увеличить ее быстродействие и уменьшить колебательность переходного процесса. Формула изобретения Следящая система, содержащая последовательно соединенные измеритель рассог.ласования, суглматор, усилитель и исполнительный двигатель, выход которого через редуктор соединен со входом измерителя рассогласования и непосредственно со входом тахогенератора, выход которого через первый ключ соединен со вторым входом сумматора, через второй ключ - с третьим входом сумматора и непосредственно - с первым входом элемента сравнения и пер- . вым входом первого логического блока, второй вход которого соединен с выходом измерителя рассогласования, а выход - с управляющим входом второго ключа и через первый инвертор - со вторым входом второго логического блока, выход которого соединен с управляющим входом первого ключа, к первому входу второго логического блока подключены последовательно соединенные широтно-импульсный модулятор и второй инвертор, а второй вход элемента сравнения подключен к выходу измерителя ра-согласования, отличающаяся тем, что, с целью повышения быстродействия и уменьшения колебательности переходного процесса системы, в ней дополнительно установлены последовательно соединенные третий логический блоки третий ключ, выход которого соединен со эходом широтно-импульсного модулятора, а выход измерителя рассогласования подключен ко второму входу третьего ключа и первому входу третьего логического блока, ко второму входу которого подсоединен выход элемента сравнения.
Источники информации,. принятые во внимание при экспертизе
1.Юревич Е. И. Теория автоматического управления. Д., Энергия, 1969, с, 249-251.
2.Авторское свидетельство СССР
по заявке 2529936, кл. G05 В 11/01 1977 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU734610A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Следящая система | 1975 |
|
SU608119A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1978 |
|
SU746405A1 |
%
.i
