(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ
РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптив-НыМ РОбОТОМ | 1979 |
|
SU830304A1 |
| Устройство для управления адаптивным роботом | 1974 |
|
SU683899A1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
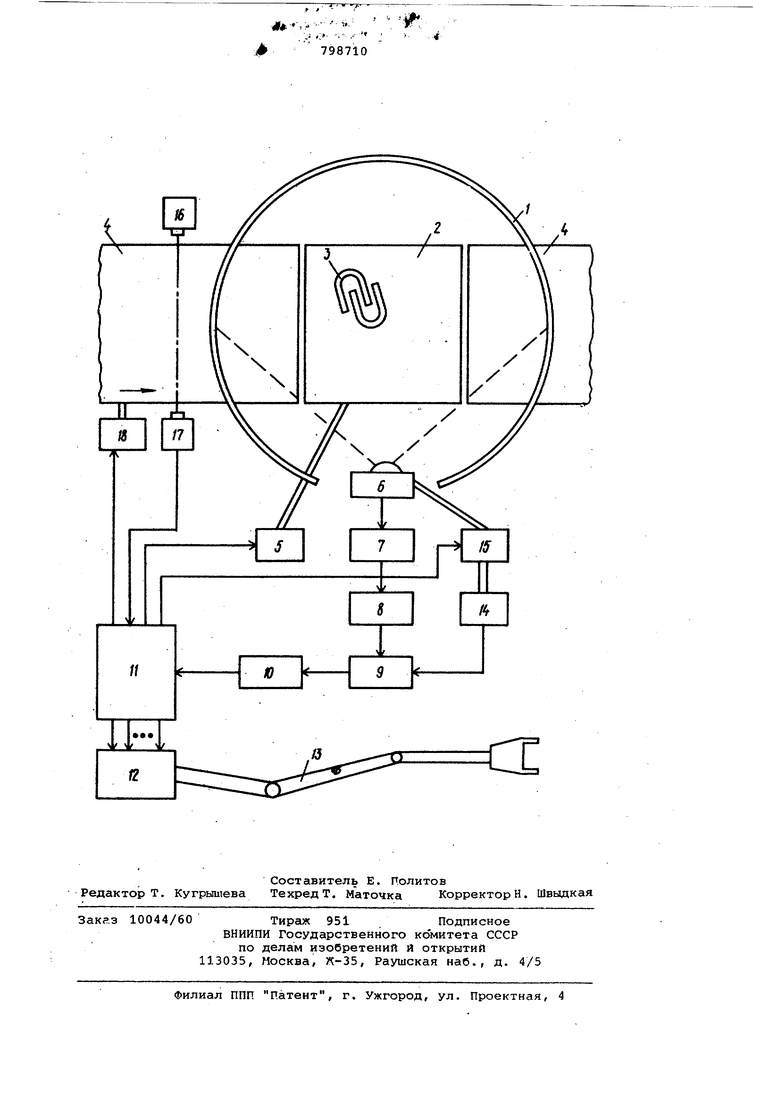
Изобретение относится к технической кибернетике и автоматизированным системам управления и может быть использовано при создании устройств для управления адаптивным роботом, например, обслуживающим конвейерную линию. ,-Известное устройство для управлени адаптивным роботом, содержавшее блок памяти, спецпроцессоры, телевизионну передающую камеру, дисплей, преобразователи, блок печати и блок управле ния приводами исполнительного органа робота, является чрезвычайно сложным 1 . Наиболее близким по технической сущности к предлагаемому изобретению является устройство, содержащее первый излучатель и последовательно сое диненные диссектор, формирователь строб-импульсов, преобразователь уго код, вычислитель координат, блок памяти и управляющий блок, первый выхо которого соединен со входом привода вертиксшьного перемещения рабочего стола, второй выход - со входом привода конвейера, а третьи выходы - со входами приводов исполнительного органа робота, а также привод и датчик вращения рабочего стола 2. Недостатком этого устройства является наличие вращения рабочего стола. В; целях увеличения быстродействия устройства необходимо повышать угловую скорость вращения рабочего стола, а это приводит к снижению устойчивости положения объектов на вращающемся рабочем столе под действием центробежных сил. Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что устройство содержит оптически связанные второй излучатель и приемник, а также привод вращения диссектора и датчик вршцения диссектора, выход которого подключен ко второму входу вычислителя координат, второй вход управляющего блока соединен с выходом приемника, а четвертый выход - со входом привода вращения диссектора. На чертеже изображена функционгшьная схема устройства. Устройство содержит первый излучатель 1, выполненный в виде кольцевой конструкции, рабочий стол 2 (например, в виде отрезка конвейерной линии), объект 3 манипулирования, лента 4 конвейера, стыкующаяся с рабочим столом, привод 5 вертикального перемеще ния рабочего стола, диссектор 6j формлрователь 7 строб-импульсов, преобр зователь 8 угол-код, вычислитель 9 координат, блок 10 памяти, управляющий блок 11, приводы 12 исполнительного органа робота, исполнительный орган 13 робота, датчик 14 вращения диссектора, привод 15 вращения диссе тора, второй излучатель 16, приемник 17, привод 18 конвейера. Устройство работает следукичим об разом. При расположении объекта 3 манипулирования на рабочем столе 2 изображение видимой части первого излуча теля 1 формируется на фотокатоде дис сектора 6 в виде прерывистой светлой линии, считывание которой периодичес ки сканирукндей электронной щелью дис сектора приводит к возникновению на его выходе периодического широтноимпульсного сигнала. Информация об углах визирования начальной и конечной границ объекта 3, затеняющего собой соответствующие части излучате ля 1 из точки наблюдени-я (точки окружности, относительно которой вращается главная плоскость объектива диссектора 6), сосредоточена во временном положении фронтов и спадов импульсов в указанной периодической последовательности широтно-импульсно го сигнала. Положение фронтов и спадов чередуется, что позволяет разделять их и Формировать соответствующие последовательности строб-импульсов для совокупности фронтов и спадо с помощью формирователя 7 строб-импульсов. Временное положение этих строб-импульсов в условиях привязки начала отсчета времени в пределах каждого из периодов сканирования дис сектором 6 однозначно характеризует азимуты начальной и конечной границ визирования объекта 3 с данного ракурса, угловое положение которого задается с помощью датчика 14 вращения диссектора. Значение этих азимутов преобразуется в двоичный многоразрядный код в преобразователе 8 угол-код. Преобразование системы отсчета (из вращающейся в неподвижную) и вычисление координат вершин описанного многоугольника вокруг выпукло-преобразованного контура объекта 3 в плоскости его зрительного сканирования диссектором 6 (эта плоскость образуется плоскостью расположения излучателя 1 кольцевого типа и оптической оси диссектора 6) осуществляется в вычислителе 9 координат, на первый вход которого последовательно поступает-информация в кодовом представлении об азимутс1Х линий визирования начальной и конечной границ объекта (раздельно по ти/пам границ визирования), а на второй Вход - информация о преобразовании вращающейся системы отсчета, т. е. об угле ракурса наблюдения рабочей зоны диссектором 6. В вычислителе 9 координат определяются координаты точек пересечения указанных групп смежных пар линий визирования объекта. Эти данные передаются в блок 10 памяти, в котором они запоминаются и реконструируют некоторую ломанную прямую, огибающей которой является выпукло-преобразованный контур объекта, положение которого (форма и ориентация) однозначно известно в заданной системе отсчета рабочего стола 2. Соединение отсчетов указанных групп ломанных прямых (раздельно для отсчетов начальной и конечной границ объекта) и аппроксимация их до контура, адекватного искомому контуру объекта, осуществляется в управляющем блоке 11. Это позволяет сформировать соответствующие сигналы управления на основе априорных сведений о текущем положении и кинематике исполнительного органа 13 робота, посредством которых на приводы исполнительного органа 12 робота задаются воздействия, обусловливающие правильный захват объекта 3. Последний детерминирован, и сведения о том, каков правильный захват его манипулятором, заложены в оперативной или долговременной памяти управляющего блока 11. Помещение объекта 3 на рабочий стол 2 производится движением ленты 4 конвейера под действием привода 18 конвейера, управляемого блоком 11. Для этого используется второй излучатель 16 и приемник 17 (например, свето- и фотодиоды соответственно), оптически связанные между собой в от- сутствии на линии их связи (поп-ерек ленты 4 конвейера) объекта 3. По мере того, как объект 3 движется с лентой 4 конвейера в направлении .к рабочему столу 2, плоскость которого совпадает с плоскостью ленты 4 конвейера на выходе приемника 17 образуется щиротно-импульсный сигнал,Начало которого при начале затенения объектом 3 второго излучателя 16 (спад импульса на выходе приемника 17) и его конец регистрируются в блоке 11. При заданной скорости движения ленты 4 конвейера длительность образующегося импульса на выходе приемника 17 определяет протяженность объекта вдоль линии протяжки его конвейером. Поскольку расстояние между центром рабочего стола 2 и линией оптической связи второго излучателя 16 и приемника 17 строго известно и неизменно, а также известна скорость движения ленты 4 конвейера и отрезка конвейера , составляющего рабочий стол 2, и движущегося с той же скоростью, что и лента 4 конвейера, то с учетом вычисленной в блоке 11 протяженности.
объекта 3 вдоль линии движения ленты 4 конвейера определяется момент остановки привода конвейера 18, соответствующий приблизительно выведению объекта 3 на центральную, зону рабочего стола 2.
По мере остановки ленты 4 конвейера блок 11 подает сигнал на вход природа 5 вертикального перемегчения рабочего стола, с помощью которого объект 3 вводится в рабочую зону зрительного сенсора, т. е. пересекает плоскость зрительного сканирования, расположенную на уровне закрепления диссектора б и излучателя 1 кольцевого типа. Необходимость в подъеме рабочего стола 2 связана с тем, что конструкция зрительного сенсора располагается выше плоскости ленты 4 конвейера,
При непрерывном движении ленты конвейера 4 и старт-стопном режиме движе ния ленты рабочего-стола 2 привод дви жения ленты рабочего стола управляетс блоком 10, а для движения ленты конвейера 4 предусмотрен аварийный останов, используемый в том случае, если лента конвейера движется достаточно быстро, объекты 3 на ленте установлены достаточно часто, а быстродействия исполнительного органа 13 робота недостаточно для съема объектов 3 с рабочего стола 2 и установки
.их в требуемую область технологического пространства.
Применение изобретения позволит за счет исключения вращения рабочего стола повысить быстродействие устройства.
Формула изобретения
Устройство для управления адаптивным роботом, содержащее первый излучтель и последовательно соединенные диссектор, формирователь строб-импульсов, преобразователь угол-код, вычислитель координат, блок памяти и управляющий блок, первый выход которого соединен со входом привода вертикс1льного перемещения рабвЯ о стола, второй выход - со входомпривода конвейера, а третьи выходы - со входами приводов исполнительного органа робота, отличающеес тем, что, с целью повышения быстродествия устройства, оно содержит оптически связанные второй излучатель и приемник, а также привод вращения диссектора и датчик вращения диссектора, выход которого подключен ко второму входу вычислителя координат, второй вход управляющего блока соединен с выходом приемника, а четвертый выход - со входом привода вращения диссектора.
Источники информации, принятые во внимание при экспертизе
кл. В 25 J 13/00, 1974 (прототип).
