(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU798710A1 |
| Устройство для управления адаптивным роботом | 1974 |
|
SU683899A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1433791A1 |
| Способ определения параметров движения глаз и устройство для его осуществления | 1985 |
|
SU1296119A1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ВНУТРЕННЕГО КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ГАЗОПРОВОДА | 1998 |
|
RU2143636C1 |
| Устройство для программирования промышленного робота | 1985 |
|
SU1277068A1 |
| Устройство для стереоскопической индикации информации на экране видеоконтрольного блока | 1981 |
|
SU1067495A1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
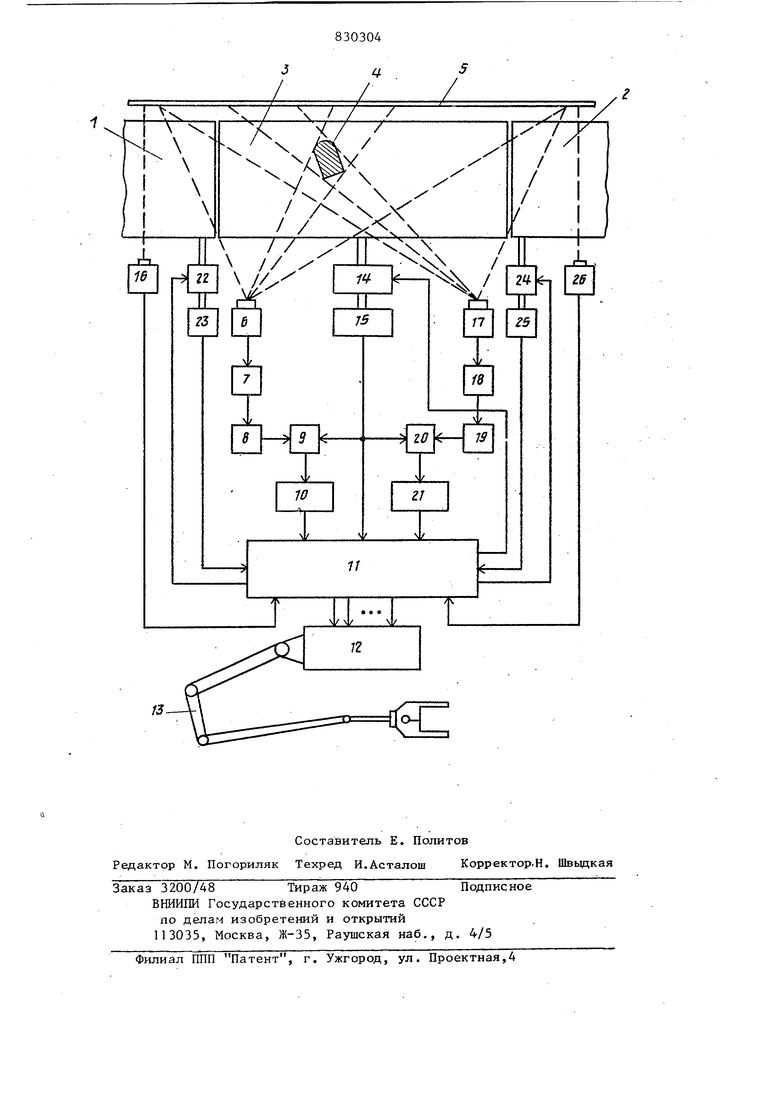
Изобретение относится к технической кибернетике и автоматизированных систем управления и может быть йспол зовано при создании устройств для. управления адаптивным, роботом, преим щественно обслуживающим конвейерные линии. Известные устройства для управлен адаптивньд роботом, содержащие блок памяти, спецпроцессоры, телевизионну передающую камеру, дисплей, преобразователи, блок печати и блок управле ния приводами исполнительного органа робота Dl Однако устройство является сложным. Наиболее близким техническим решением к изобретению является устройство, содержащее излучатель и последовательно соединенные первый диссектор, первый формирователь стро импульсов, .первый преобразователь угол-код,.первый вычислитель координат, первый блок памяти, вычислительный блок л приводы исполнительного органа робота, а также привод и датчик вращения рабочего стала fiZj, Недостатком этого устройства является наличие вращения рабочего стола, которое снижает быстродействие устройства, Последнее связано с тем, что угловая скорость вращения рабочего стола ограничена устойчивостью объектов на рабочем столе, определяемой действием на объек-Ы центробежных сил. Кроме того, это устройство вырабатывает малый объем информации о расположении объекта манипулирования, что влияет на точность его захвата роботом, а также неприменимо для работы с конвейерной линией, состоящей из нескольких подвижных участков. Цель изобретения - увеличение надежности и быстродействия устройства, а такжеповышение его точности и расширение функциональных возможностей. 3 Цель достигается тем, что устройство содержит мехаш1чески связанные первые привод и датчик перемещения ленты конвейера и оптически связанны с излучателем, первый приём1шк, выхо которого соединен со вторым входом вычислительного блока, третий вход которого подключен к выходу первого датчика перемещения ленты конвейера второй выход которого соединен со вторым входом первого вычислителя координат, а второй выход - ко входу первого привода перемеп1е1шя ленты конвейера. Устройство также содержит последовательно соединенные второй диссектор, второй формирователь стробимпульсов, второй преобразователь угол-код, второй вычислитель координ и второй блок памяти, выход которого подключен к четвертому входу вычисли тельного блока, выход первого датчик перемещения ленты конвейера подключе ко второму входу второго вычислителя координат. Кроме того, устройство содержит вторые привод и датчик перемещения ленты конвейера, а также механически связанные трзтьи привод и датчик пер мещения ленты конвейера, причегЙ выход второго датчика перемещения ленты конвейера соединен с пятым входом вычислительного блока, к шестому входу которого подключен выход третьего датчика перемещения ленты конвейера, а входы второго и третьего приводов перемещений ленты конвейера соответственно соединены с третьим и четвертым выходами вычисли тельного блока. Устройство .также содерзкит оптичес ки связанный с излучателем второй приемник, выход которого соединен с седьмым входом вычислительного блока На чертеже изображена функциональ ная схема устройства. Устройство содержит входной 1, вы ходной 2, средний 3 участки ленты конвейера, объект.4, излучатель 5, первый диссектор 6, первый формирователь 7 строб-импульсов, первый преобразователь 8 угол-код, первый вычислитель 9 координат, первый блок 10 памяти, вычислительный блок 11, приводы 12 йсполнитгльного органа робота, исполнительный орган 13 робота, первый привод 14 перемещения ленты конвейера, первый датчик 15 4 4. перемещения ленты конвейера, -первый приемник 16, второй диcceктoJ) 17 второй формирователь 18 строб-импульсов, второй преобразователь 19 уголкод, второй вычислитель 20 кoopдинaтJ второй блок 21 памяти, второй привод 22 перемещения ленты конвейера, второй датчик 23 перемещения ленты конвейера, третий привод 24 перемещения ленты конвейера, третий датчик 25 перемещения ленты конвейера, второй приемник 26. Устройство работает следующим образом. В случае перемещения объекта 4 на ленте конвейера, представляющей единое целое число, лента перемещается под действием первого привода 14 перемещения ленты конвейера, управляемого от вычислительного блока II в старт-стопном или непрерывном режиме. Величина перемещения ленты конвейера в функции времени задается первым датчиком 15 перемещения ленты конвейера, первый выход которого связан с третьим входом вычислительного блока П. При этом отсчет времени может исчисляться от момента пересечения объектом 4 линии оптической связи излучателя 5 и первого приемника 16, выход которого соединен со вторьм входом вычислительного блока 11. Ленту конвейера как целое можно условно разбить на участки входной 1, выходной 2 и средний 3, На первом участке определяется момент пересечения объектом 4 линии оптической связи излучателя 5 с первым приемником 6, на втором осуществляется захват объекта 4 с ходу при непрерьюном режиме движения ленты конвейера или после остановки ленты в старт-стопном режиме работы конвейера, а на третьем зрительный анализ выпукло-преобразованного контура объекта 4 в плоскости зрительного сканирования первого диссектора 6, причем указанный контур устанавливается не полностью, а лишь фрагментарно т.е. не по всему периметру объекта 4 в плоскости его зрительного сканирования. Процесс фрагментарного зрительного восприятия контура объекта 4, перемещающегося поступательно с постоянной скоростью по среднему участку ленты конвейера, описывается следующим образом. На фотокатоде первого диссектора 6 (а в случае применения двух диссекторов, то и второго диссектор 17)формируется изображение в виде прерывистой светлой лишш. Ее преры вание объясняется фактором затенени излучателя 5 объектом 4 в поле зрения диссектора. Считьшанне электрон ной щелью диссектора 6, указанной прерывистой светлой линией, приводи к возникновению на выходе диссектор 6 широтно-импульсного сигнала, пери следования которого равен периоду электронной развертки в диссекторе Широтно-импульсная последователь ность преобразуется в первом формирователе 7 строб- импульсов в парные строб-импульсы, соответствующие спа ду и фронту импульсов в указанной широтно-импульсной последовательнос Нечетные строб-импульсы соответству ют начальной границе теневого сектора; а четные - конечной границе того же теневого сектора в каждом из циклов зрительного сканирования диссектором 6 при наличии в его пол зретя непрозрачного объекта. Значения азимутов визирования .объекта преобразуются в двоичный код в перв преобразователе 8 угол-код, откуда кодированные последовательности пост пают раздельно для началь ной и . конечной границ визирования объекта на первый вход первого вычислителя 9 координат. Первый датчик 15 перемещения ленты конвейера преобразует значение продольной координаты (вдоль линии движения ленты конвейера) движущегося объекта 4, на-, пример точки его сечения, лежащей на средней линии, разделяющей продо ный размер объекта 4 на две равные части, причем продольный размер объ та определяется произведением скорости движения конвейера на разность моментов времени пересечения задней и передней частями объекта 4 линии оптической связи первого приемника 16 с излучателем 5. В случае, когда лента конвейера представляет собой не единое целое, а разбита на раздельно управляемые участки - входной 1, выходной 2 и средний 3. При синхронной работе приводов 14,22,24 перемещения указа ных участков ленты конвейера, объек 4 движется с постоянной скоростью на всех указанных участках, как в случае одноленточного конвейера. Разделение конвейера на входной 1 и средний 3 участки ленты позволяет существенно увеличивать удельную загрузку на единицу его длины, т.е. уменьшить интервал между загружаемыми на ленту конвейера объектами, а также увеличить длину среднего участка 3, что приводит к увеличению точности воспроизведения контура объекта с помощью зрительного сенсора робота, за счет увеличения информации в фрагментарном описании этого контура. Для того; чтобы на среднем участке 3 не могло одновременно находиться два объекта, управление движением участков и 3 осуществляется раздельно с помощью вычислительного блока П, на второй вход которой поступают сигналы с выходя приемника 16, сигнализирующие о подходе второго объекта, если первый объект еще находится в зоне действия зрительного сенсора робота (на участке $. В этом случае привод 22 останавливает входной участок 1 ленты конвейера, а анализируемый объект движется на ленте среднего участка 3 без каких-либо изменений. Такой прием эквивалентен разряжению интервалов междуОбъектами, -устаналиваемыми на входном участке ленты конвейера. Б этом случае устройство управления автоматически.задает трубемый интервал между объшстами, поступающими в зону их осмотра зрительным сенсором робота, что устраняет необходимость в наличии технологического запаса по интервалу,гарантирую-.. щего работу линии без сбоев. В принципе допустим такой режим работы,, при котором лента среднего участка конвейера движется с переменной скоростью. Например, скорость протяжки ленты среднего участка начинает увеличиваться .по сравнеьшю со скоростью протяжки ленты входного участка на ленту с момента передачи объекта с ленты входного участка на ленту среднего участка конвейера(при передаче объекта с участка на участок скорости протяжки лент этих участ-г ков должны быть строго одинаковыми} Это также эквивалентно разряжению объектов на исходном участке конвейера, на который объекты можно загружать достаточно часто. Причем в этом случае входной участок ленты конвейера может двигаться непрерывно, а не встарт-стопном режиме подашь объек тов на средний участок 3 конвейера. Естественно, что при переменном режиме работы ленты среднего участка мгновенная скорость движе1О1я этой ленты должна быть всегда известна (эта информация определяется работой датчика 15 перемещения ленты конвейе ра),Что необходимо для вычисления положения объекта 4 во времерш относительно диссекторов 6 и 17. Применение изобретения позволяет првысить надежность, быстродействие и расширить функциональные возможное ти устройства за счет обеспечения визуадб1зации объектов, представляет собой часть ленты конвейера. Формула изобретения 1 j Устройство для управле1шя адап тив1®ш роботом, содержащее излучател и последовательно соединенные первый диссектор., первый формирователь строб-импульсов, первый преобразователь угол-код, первьй вычислит1ль координат, первый блок памяти, вычис лительный блок и прнводы исполнитель ного органа робота, отличающееся тема что, с целью увеличения надежности и быстродействия устройства, оносодержит механичес1СИ связанные первые привод и датчик перемещения лакты конвейера и оптически связанньш с излучателем первый приемник,ВЫХОД которого соединен со .вторым входом вычислительного блока. третий вход которого подключен к выходу nepsofO Датчика перемещения ленты конвейера икс входу nspBOfo вь чйслителя координат,а второй выход - к входу первого привода перемещения ленты конвейе а. 4 2. Устройство по п. 1, о .т л ичающееся тем, что, с целью повышегшя точности устройства, оно содержит последовательно соединенные второй диссектор, второй формирователь строб-импульсов,, второй преобразователь угол-код, второй вычислитель координат и второй блок памяти, выход которого подключен к четвертому входу вычислительного блока, выход первого датчика перемещения ленты конвейера подключен ко второму входу второго вычислителя координат. .3. Устройство .по пп, 1 и 2, о тл и ч а ю щ ё е с я тем, что, с целью расширения функциональных возможностей, устройство содержит механически связанные вторые, привод и датчик перемещения ленты конвейера, а также механически связанные, третьи привод и датчик перемещения ленты конвейера, причем выход второго датчика перемещения ленты конвейера соединен с пятым входом вычислительного блока к шестому входу которого подключен выход третьего датчика перемещения ленты конвейера, а входы второго и третьего приводов перемещения ленты конвейера соединены соответственно с третьим и четвертым выходами вычислительного блока. 4. Устройство по пп, 1-3, о т л ич а ю щ е е с я тем, что, с целью расширения функциональных возможностей устройства, оно содержит оптически связанный с излучателем д.торой прием шк, выход которого соединен с седьмым входом вычислительного блока. Источники информации, принятые во внимание при экспертизе 1,Дистанционно-управляемые ррботы-манип ляторы.. Сб. статей. Цод ред. Б. П. Попова, М., МиЕ,1976, с. 99-134. 2.Авторское свидетельство СССР по заявке № 2056396/18-24, кл, В 25 ЗГ 13/00, 1974 (прототип).
830304 Ц
