Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления фрезерными станками и другими видами технологическох о оборудования, в котором необходимо осуществлять коррекцию эквидистанты.
Целью изобретения является обеспечение возможности реализации в системах ЧПУ с линейным интерполятором функции коррекции эквидистант, представляющих собой ломаную линию.
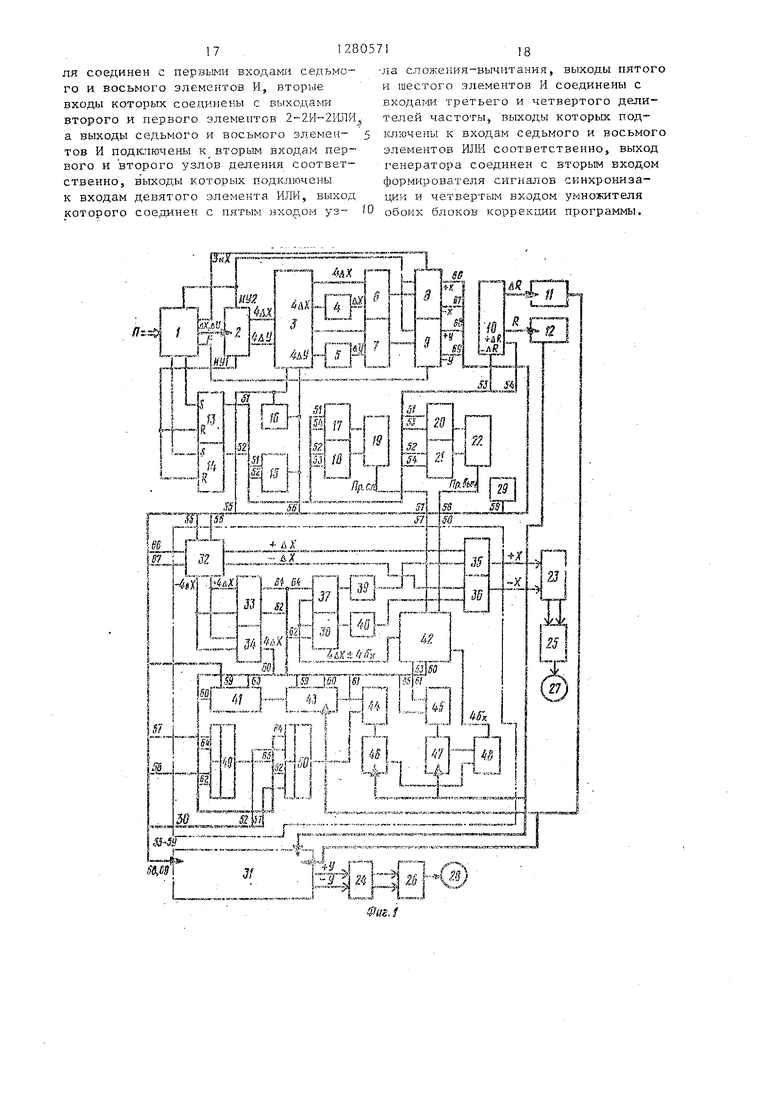
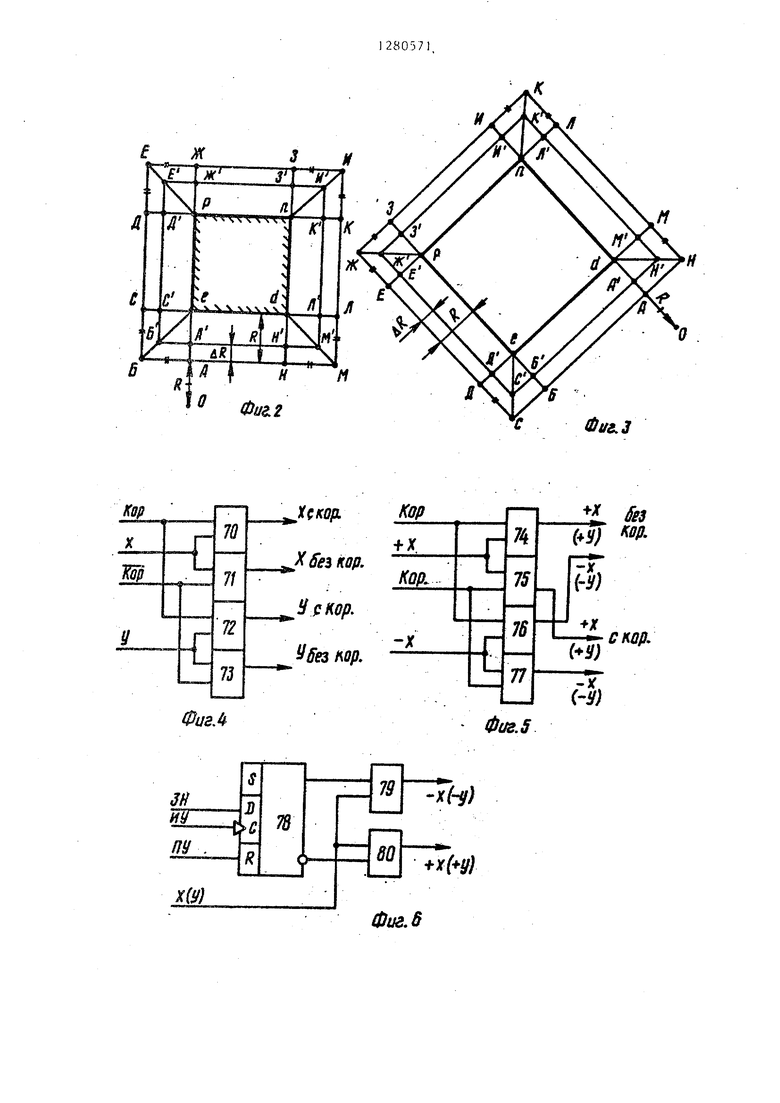
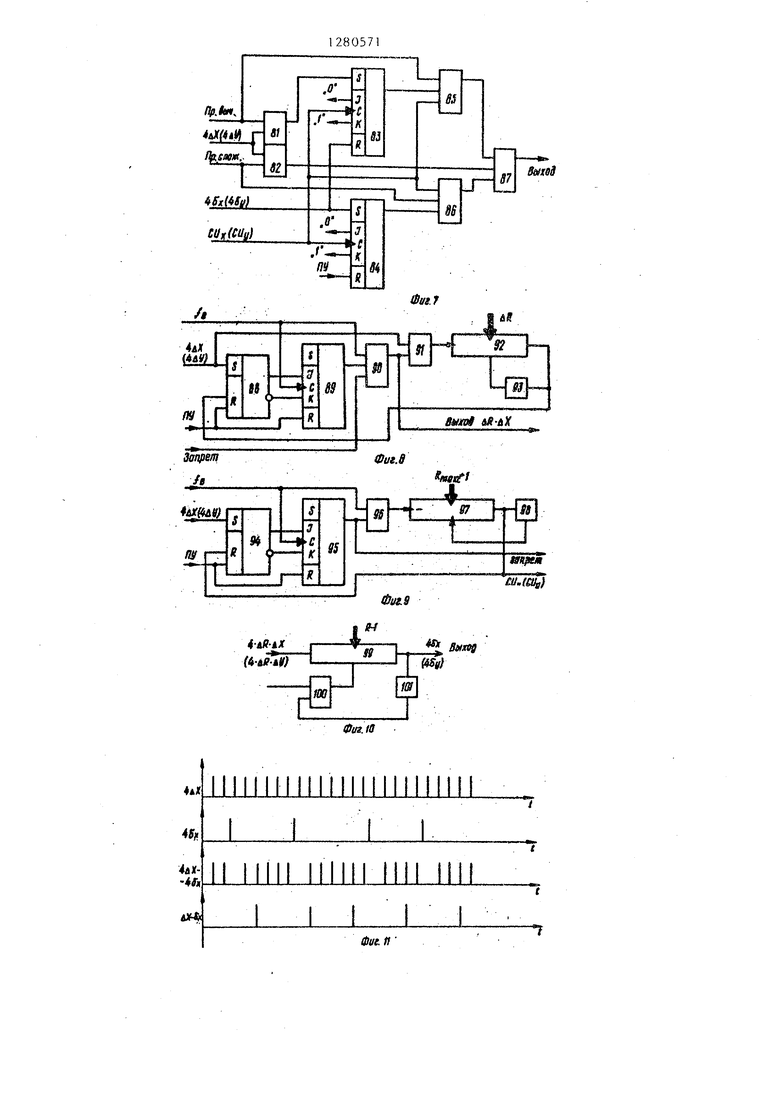
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - схема обработки детали прямоугольной формы и выхода инструмента на траекторию; на фиг, 3 - схема обработки детали в форме повернутого квадрата и выхо-. да инструмента на траекториюi на фиг. 4 - схема первого коммутатора; на фиг, 5 - схема второго коммутатора; на фиг. 6 - узел выб.ора знака; на фиг, 7 - узел сложения-вычитания;
на фиг. 8 - умножитель, на фиг. 9 - 125 ьыход 61 умножителя 43, нулевой вы- формирователь сигналов синхронизацииJ ход 62 RS-триггера 33, первый выход 10
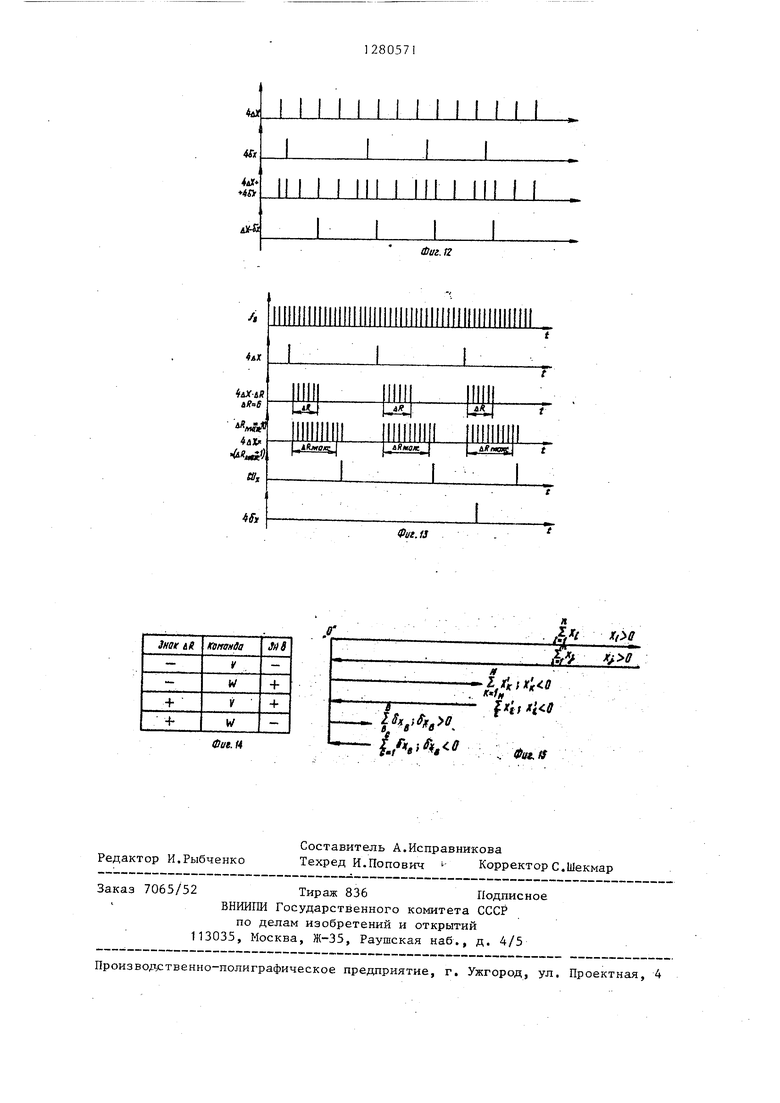
на фиг. 10 - узел деления;на фиг.11 - временная диаграмма получения корректированной программы в случае вычитания корректирующих поправок; на фиг. 12 - то же, в случае суммирования корректирующих поправокJ на фиг, 13 - временная диаграмма получения импульсов синхронизации и импульсов коррекции; на фиг. 14 - таблица выбора знака поправки; на фиг, 15 - диаграмма, поясняющая отсутствие накопленной ошибки.
Устройство состоит из блока 1 ввода программы, интерполятора 2, построенного на умножителях, например двоично-десятичных, первого ком- мутатора 3, первого и второго делителей 4 и 5 частоты, первого 6 и второго 7 элементов ИЛИ, первого 8 и второго 9 узлов выбора знака, пульта 10 коррекции, регистра uR 11, регист- 12, первого 13 и второго 14 RS-триггеров, третьего элемента ИЛИ 15, элемента НЕ 16, первого 17 и второго 18 элементов И, четвертого элемента ИЛИ 19, третьего 20 и четвертого 21 элементов И, пятого элемента ИЛИ 22, первого 23 и второго 24 блоков управления приводами, первого 25 и второго 26 приводов, первого 27 и второго 28 исполнительных двигателей, установленных на станке (не показан), генератора 29, первого
30
63 формирователя 41 сигналов синхронизации, единичный выход, 64 RS-триггера 33, выход 65 элемента 2-2И- -2ИЛИ 49, выходы 66 и 67 узла 8 выб ра знака, выходы 68 и 69 узла 9 выбо ра знака.
35
40
Первый коммутатор 3 состоит из элементов И 70-73. Второй коммутатор 32 состоит из элементов И 74-77. Узел 8 (9) выбора знака состоит из D-триггера 78 и элементов И 79, 80. Узел 42 сложения-вь1читания состоит из элементов И 81, 82, первого 83 и второго 84 ЛК триггеров, элементов И 85, 86 и элемента ИЛИ 87. Умножитель 43 состоит из RS-триггера 88, JK-триггера 89, элемента И 90, элемента ИЛИ 91, вычитающего счетчика 45 92, элемента 93 задержки. Формирователь 41 сигналов синхронизации состоит из RS-триггера 94, JK-триггера 95, элемента И 96, вычитающего .счетчика 97, элемента 98 задерлски. 50 Узел 46 (47) деления состоит из вычитающего гчетчика 99, элемента Win 100, элемента И 101.
Устройство работает следующим образом.
Программа обработки детали представляет собой траекторию движения центра фрезы (см, фиг. 2) из нулевой точки О к первой точке А, лежащей на эквидистантном контуре, уда55
5
0
30 и второго 31 блоков коррекции программы, каждый из которых состоит из второго коммутатора 32, третьего RS-триггера 33, шестого 34, седьмого 35 и восьмого 36 элементов ИЛИ, пятого 37 и шестого 38 элементов И, третьего 39 и четвертого 40 делителей частоты, формирователя 41 сигналов сигнализации, узла 42 сложения-вычитания, умножителя 43, седьмого 44 и восьмого 45 элементов И, первого 46 и второго 47 узлов деления, девятого элемента ИЛИ 48, первого 49 и второго 50 элементов 2-2И-2ИЛИ.
Устройство таклсе содержит единичные выходы 51 и 52 триггеров 13 и 14 соответственно, выход 53 знака минус AR пульта коррекции, вькод 54 знака плюс дК пульта корректщи, выход 55 элемента НЕ, выход 56 элемента ИЛИ 15, выходы 57 и 58 элемен- тов ИЛИ 19 и 22, выход 59 гене)ато- ра 29, выход 60 элемента ИЛИ 34,
25 ьыход 61 умножителя 43, нулевой вы- ход 62 RS-триггера 33, первый выход
30
63 формирователя 41 сигналов синхронизации, единичный выход, 64 RS-триггера 33, выход 65 элемента 2-2И- -2ИЛИ 49, выходы 66 и 67 узла 8 выбора знака, выходы 68 и 69 узла 9 выбора знака.
5
0
Первый коммутатор 3 состоит из элементов И 70-73. Второй коммутатор 32 состоит из элементов И 74-77. Узел 8 (9) выбора знака состоит из D-триггера 78 и элементов И 79, 80. Узел 42 сложения-вь1читания состоит из элементов И 81, 82, первого 83 и второго 84 ЛК триггеров, элементов И 85, 86 и элемента ИЛИ 87. Умножитель 43 состоит из RS-триггера 88, JK-триггера 89, элемента И 90, элемента ИЛИ 91, вычитающего счетчика 5 92, элемента 93 задержки. Формирователь 41 сигналов синхронизации состоит из RS-триггера 94, JK-триггера 95, элемента И 96, вычитающего .счетчика 97, элемента 98 задерлски. 0 Узел 46 (47) деления состоит из вычитающего гчетчика 99, элемента Win 100, элемента И 101.
Устройство работает следующим образом.
Программа обработки детали представляет собой траекторию движения центра фрезы (см, фиг. 2) из нулевой точки О к первой точке А, лежащей на эквидистантном контуре, уда5
ленном от обрабатываемой поверхности детали на величину радиуса фрезы R, и обход по контуру АБЕИМК в любом направлении с последующим возвращением в точку О, 11ля того чтобы предлагаемое устройство могло работать и корректировать эквидистантный контур, необходимо траекторию разбить на кадры программы следующим образом: ОА, АБ, БС, СД, ДЕ, ЕЖ, ЖЗ, ЗИ, ИК, KJI, JM, МН, НА, АО. В кадре ОА программы, кроме основной инфор- мащ1и, задается команда Признак внутреннего контура (W), в кадре АБ, кроме основной информации - ко- манда Признак внешнего контура (V), в кадре БС - команда V, в кадре СД дополнительные команды отсутствуют, в кадре ДЕ задается команда V, в кадре ЕЖ - команда V, в кадре ЖЗ дополнительные команды .отсутствуют, в кадрах ЗИ и ИК задается команда V, в кадре КЛ дополнительные команды отсутствуют, в кадрах ЛМ и МН задается команда V, в кадре НА дополнительные команды отсутствуют, в кадре АО задается ко- манда W. На фиг. 2 и 3 участки (кадры) траектории, где задана команда W обозначены одной черточкой, а участки (кадры) траектории, где задана команда V - двумя черточками. Из фиг, 2 и 3 видно, что при таком разбиении траектории движения инструмента в случае, если используется фреза не радиуса R, а радиуса R-uR, она должна двигаться по траектории, обозначенной буквами, по меченныг-1И штрихами, т.е. для фиг. 2 ОАБСДЕЖЗИЮМНАО. Эта траектория также является эквидистантной контуру
детали, но отстоящей от него на величину R-AR. Следовательно, необходимо так скорректировать исходную тра- екторию, отстоящую от контура детали на величину R, чтобы она превратилась в траекторию, отстоящую от контура детали на величину R-AR, причем начальной и конечной точкой скорректированной и нескорректированной траекторий должна быть точка 0. Из фиг. 2 и 3 видно, что для получения скорректированной траектории необхо
димо скорректировать только те кадры, ,j 12, и величину дК отклонения радиуса
которые отмечены одной или двумя черточками. Причем при знаке AR минус и признаке внешнего контура модуль величины перемещения должен уменьреальной фрезы от расчетного радиуса R, которая запоминается в регистре 11. Кроме того, на пульте 10 устанавливается в определенное положешаться, ири знаке iR минус и признке внутреннего контура модуль величины перемещения должен увеличиваться. Ири положительном знаке uR ситуация меняется на обратную. Скорректированные участки отличаются от некорректированных на величины Sx ,. 5у
Так, проекция отрезка Д С на координатные оси X, Y отличается от проекций отрезка ДС на величины Ь и Sij , т.е.
-Sx,, (1)
X
А с А С
X
АС
Y
АС
-S,
(2)
Но из подобия треугольников СДЕ
легко видеть, что величины и Sy
С Д Е
ЗУ равны
iR uR R
Ac )
AC
(3) (4)
Тогда для любого кадра программы, в котором присутствуют дополнительные команды V и W, скорректированные величины определяются по формулам
/ЬХ,/ /4Х±А|.йХ/, (5) /AYj /AYi.uY/, (6)
5tO 5 20
.,
j причем знаки в формулах (5) и (6)
определяются по описанному вьш1е зако-, ну в зависимости от знака uR и наличия команд V и W, который можно представить в виде таблидв (фиг. 14).
Таким образом устройство рабо- . тает по следующему алгоритму: кадры программы, в которых нет команд признаков V и
40
0
W, отрабатываются без коррекции, а кадры, в которых есть команда V или W, отрабатываются с коррекцией в соответствии с формулами (5), (6) и со знаками поправок, соответствующими таблице на фиг. 14.
Перед началом работы с помощью пульта 10 коррекции оператор набирает величину расчетного радиуса фрезы R, которая запоминается в регистре
реальной фрезы от расчетного радиуса R, которая запоминается в регистре 11. Кроме того, на пульте 10 устанавливается в определенное положе512
ние тумблер выбора знака коррекции + Д R или -i R.
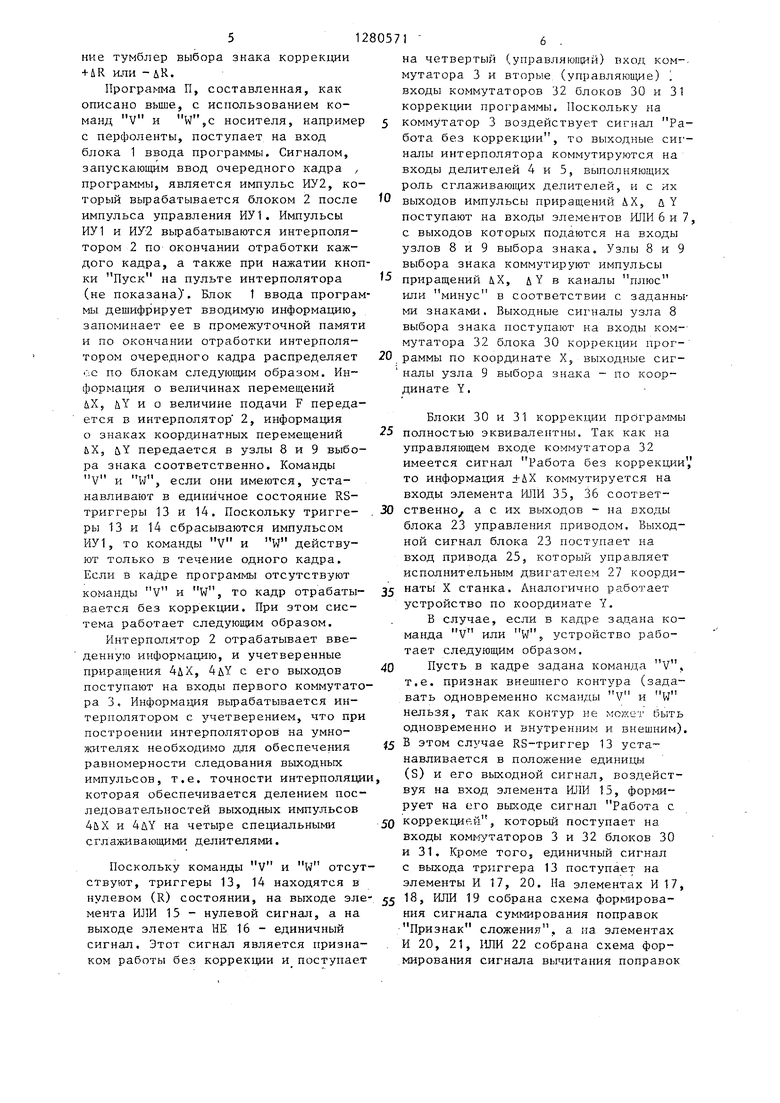
Программа П, составленная, как описано BbEue, с использованием команд V и W,c носителя, например с перфоленты, поступает на вход блока 1 ввода программы. Сигналом, запускающим ввод очередного кадра , программы, является импульс ИУ2, который вырабатывается блоком 2 после импульса управления ИУ1. Импульсы ИУ1 и ИУ-2 вырабатываются интерполятором 2 по окончании отработки каждого кадра, а также при нажатии кнопки Пуск на пульте интерполятора (не показана). Блок 1 ввода программы дешифрирует вводимую информадию, запоминает ее в промежуточной памяти и по окончании отработки интерполятором очередного кадра распределяет С;С по блокам следующим образом, Ин- формагщя о величинах перемещений йХ, uY и о величине подачи F передается в интерполятор 2, информация о знаках координатных перемещений йХ, &У передается в узлы 8 и 9 выбора знака соответственно. Команды V и W, если они имеются, устанавливают в единичное состояние RS- триггеры 13 и 14, Поскольку тригге- ры 13 и 14 сбрасываются импульсом ИУ1, то команды V и W действуют только в течение одного кадра. Если в кадре программы отсутствуют команды V и W, то кадр отрабаты- вается без коррекции. При зтом система работает следующим образом.
Интерполятор 2 отрабатывает введенную информадию, и учетверенные приращения 4йХ, 4д с его выходов поступают на входы первого коммутатора 3, Информация вырабатывается интерполятором с учетверением, что при построении интерполяторов на умножителях необходимо для обеспечения равномерности следования выходных импульсов, т,е, точности интерполяци которая обеспечивается делением последовательностей выходных и myльcoв 4йХ и 4дУ на четыре специальными сглаживающими делителями.
Поскольку команды V и W отсутствуют, триггеры 13, 14 находятся в нулевом (R) состоянии, на выходе эле мента ИЛИ 15 - нулевой сигнал, а на выходе элемента НЕ 16 - единичный сигнал. Этот сигнал является признаком работы без коррекции и поступает
на четвертый (управляющий) вход коммутатора 3 и вторые (управляющие) . входы коммутаторов 32 блоков 30 и 31 коррекции программы. Поскольку на коммутатор 3 воздействует сигнал Работа без коррекщ1и, то выходные сигналы интерполятора коммутируются на входы делителей 4 и 5, выполняющих роль сглаживаюнщх делителей, и с их выходов импульсы приращений iX, uY поступают на входы элементов ИЛИ 6 и 7 с выходов которых подаются на входы узлов 8 и 9 выбора знака. Узлы 8 и 9 выбора знака коммутируют импульсы приращений X, uY в каналы плюс или минус в соответствии с заданными знаками. Выходные сиг налы узла 8 выбора знака поступают на входы коммутатора 32 блока 30 коррекции программы по координате X,, выходные сигналы узла 9 выбора знака - по координате Y,
Блоки 30 и 31 коррекции программы полностью эквивалентны. Так как на управляющем входе коммутатора 32 имеется сигнал Работа без коррекции то информация +ДХ коммутируется на входы элемента ИЛИ 35, 36 соответ- ственно а с их выходов - на входы блока 23 управления приводом. Выходной сигнал блока 23 поступает на вход привода 25, который управляет исполнительным двигателем 27 координаты X станка. Аналогично работает устройство по координате Y,
В случае, если в кадре задана команда V или устройство работает следующим образом.
Пусть в кадре задана команда V, т.е. признак внешнего контура (задавать одновременно команды V и W нельзя, так как контур не oжer быть одновременно и внутренним и внешним) Б этом случае RS-триггер 13 устанавливается в положение единицы (S) и его выходной сигнал, воздействуя на вход элемента ИЛИ 15, формирует на его выходе сигнал Работа с коррекцией, который поступает на входы кoм fyтaтopoв 3 и 32 блоков 30 и 31, Кроме того, единичный сигнал с выхода триггера 13 поступает на элементы И 17, 20, Па элементах И 17, 18, ИЛИ 19 собрана схема фop иpoвa- ния сигнала суммирования поправок Признак сложения, а на элементах И 20, 21, ИЛИ 22 собрана схема формирования сигнала вьгаитания поправок
7
Признак вычитания. Обе эти схемы реализуют логику, по таблице на фиг, 14, для чего на них подаются сигналы знака поправки плюс или минус с пульта 10 коррекции и кс- манд,ы V, W с выходов RS-тригге- ров 13 и 14. Для случаев, изображенных на фиг. 2 и 3, uR имеет знак минус, следовательно, два единичных потенциала присутствуют на входах элемента И 20 и на выходе элемента ИЛИ 22 - сигнал Признак вычитания . Так как на входе коммутатор 3 присутствует сигнал Работа с кор рек1щей, то он коммутирует выходны сигналы интерполятора 2 4йХ и 4iY непосредственно на входы элементов И.ПИ 6 и 7, с выхода которых через узлы 8 и 9 выбора знак ов они поступают по каналам соответствуюнщх знаков на входы коммутаторов 32 блоков 30 и 31. Так как на входах коммутаторов 32 теперь присутствует сигнал Работа с коррекцией, сигналы появляются на выходах, подключенных к входам RS-триггера 33 и элемента
ИЛИ 34. Если на входе коммутатора .была информация по каналу Плюс, то она появляется на выходу коммутатора 32, подключенного к S - входу триггера 33, если по каналу минус , на входе R, благодаря чему триггер 30 запоминает знак перемещения. Какой бы знак ни был у выходных импульсов 4АХ, они появляются на выходе элемента ИЛИ 34. Каждый выходной импульс этого элемента поступает на формирователь 41 сигналов синхронизации, умножитель 43 и узел 42 сложения-вычитания. При этом формирователь 41 вырабатывает импульс синхронизации, который поступает затем на один из входов узла 42 сложения-вычитания . Умножитель 43 на каждый запускающий импульс формирует пачку импульсов высокой частоты, причем число импульсов в пачке равно
.величине AR, следовательно, число импульсов на выходе умножителя 43
.равно 4йХ UR. Эти импульсы поступают на входы элементов И 44, 45, причем всегда один из этих элементов открыт по одному из входов, а другой закрыт. Если открыт элемент И 44, то с его выхода импульсы поступают на вход узла -46 деления, а если открыт элемент И 45, то с его выхода . импульсы поступают на вход узла 47
80571S
деления. Эти узлы формируют один импульс на своем выходе при поступлении на вход R импульсов, т.е. на.выходах формируются импульсы поправок . .5 4лХ. Так как их выходы объединены элементом ШШ 48, то эта величина поступает на вход уэла 42 сложения- вычитания . Последний при наличии сигнала Признак сложения осуществ- 0 ляет сложение 4&Х и , а при наличии сигнала Признак вычитания осуществляет операцию вычитания из величины 4лХ величины . Таким образом, на его выходе образуется
15
последовательность импульсов, представляющая собой вьфажение 4ЛХ+45х. Эта последовательность с выхода узла 42 поступает на входы элементов И 3.7, 38, Эти элементы управляются
20 единичным и нулевым выхода1 ш триггера 33, состояние которого зависит от знака перемещения по координате X. Если знак плюс, .то открыт элемент И 37, если знак минус, - эл емент
И 38. С выходов эл ементов И 37, 38 последовательность импульсов, равная +(4ДХ ), поступает на входы делителей 39 и 40 соответственно. А с выходов делителей 39 и 40 после деле30 ния на четьфе на элементы ИЛИ 35, 36 поступает последовательность импульсов, равная ДХ ±5х, т.е. величина скорректированного приращения согласно формулам (5) и (6), С выходов
35 элементов ИЛИ 35, 36 эти импульсы поступают на входы блока 23 управления приводом. Если в кадре задана команда W, то в единице находится триггер 14, а так как его выход объе40 динен элементом ИЛИ 15 с единичным выходом триггера 13, то устройство работает полностью аналогично предыдущему режиму, только по-другому вырабатываются признаки сложения и
45 вычитания, что видно из таблицы, приведенной на фиг, 14,
Простота программирования, благодаря которой не требуется третьей команды Отмена коррекции (G 40 в .
0 большинстве систем), достигается за счет того, что точка О, в которой находится инструмент перед выходом на эквидистантную траекторию, выбирает- i ся на расстоянии R по нормали к эк5 видистантному контуру. В кадре, в котором задано перемещение ОА(фиг.2иЗ) задается команда, обратная участ ку .контура, на который необходимо вый9
ти. Так, для внешних контуров задается признак W внутреннего контура, для внутренних контуров задается Признак V внешнего контура, в результате устройство вычисляет поправ ки и знаки, выводит инструмент вместо точки А в точку А . Та же команда задается при возврате из точки А в точку 0.
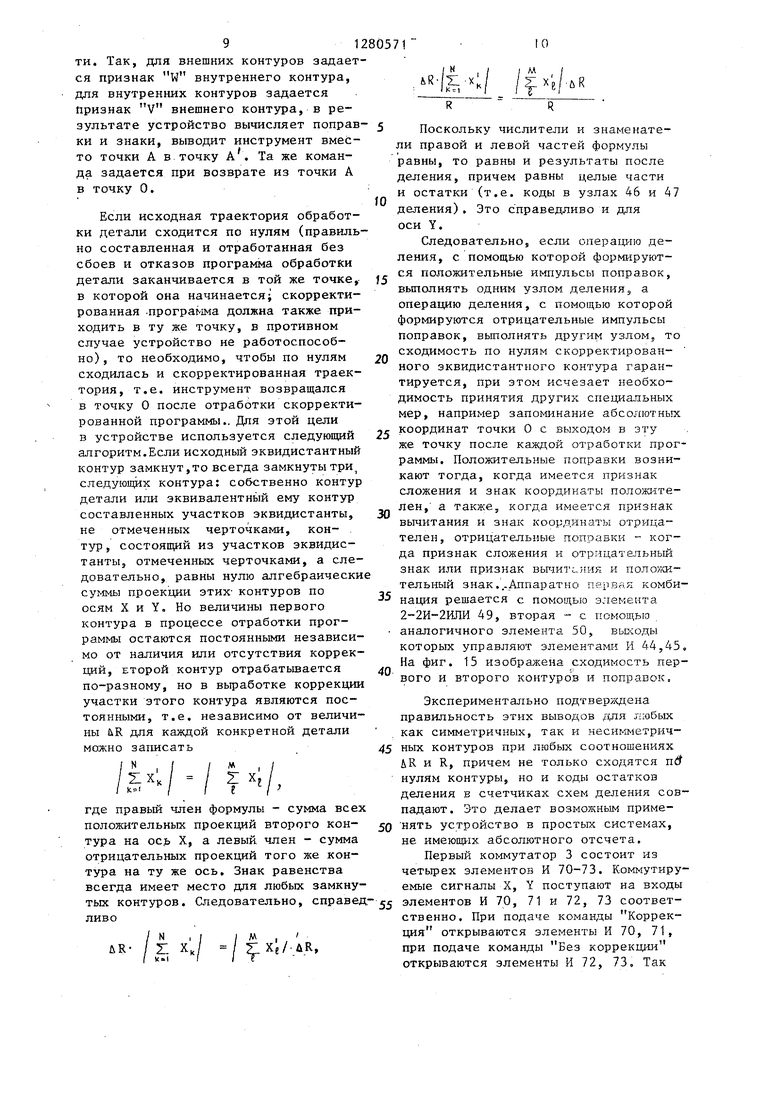
Если исходная траектория обработки детали сходится по нулям (правильно составленная и отработанная без сбоев и отказов программа обработки детали заканчивается в той же точке в которой она начинается; скорректированная .nporpaNMa должна также приходить в ту же точку, в противном случае устройство не работоспособно) , то необходимо, чтобы по нулям сходилась и скорректированная траектория, т.е. инструмент возвращался в точку О после отработки скорректированной программы.. Для этой дели в устройстве используется следующий алгоритм.Если исходный эквидистантный контур замкнут,то всегда замкнуты три следующих контура: собственно конту детали или эквивалентный ему контур составленных участков эквидистанты, не отмеченных черточками, контур , состоящий из участков эквидис- танты, отмеченных черточками, а следовательно, равны нулю алгебраическ суммы проекции этих контуров по осям X и Y. Но величины первого контура в процессе отработки программы остаются постоянными независимо от наличия или отсутствия коррекций, Еторой контур отрабатьшается по-разному, но в выработке коррекци участки этого контура являются постоянными, т.е. независимо от величины uR для каждой конкретной детали можно записать
N . / / м
Xv / / Z X. к- / I I 1
где правый член формулы - сумма всех полояштельных проекций второго кон- тура на ось X, а левый член - сумма отрицательных проекций того же контура на ту же ось. Знак равенства всегда имеет место для любых замкнутых контуров. Следовательно, справед ливо
N ,
Г. X,
/ м . 1 Xe/.uR,
н
К 1
м
uR
Поскольку числители и знаменатели правой и левой частей формулы равны, то равны и результаты после деления, причем равны целые части и остатки (т.е. коды в узлах 46 и 47 деления). Это справедливо и для оси Y.
Следовательно, если операцию деления, с помощью которой формируются положительные импульсы поправок, выполнять одним узлом деленияS а операцию деления, с помощью которой формируются отрицательные импульсы поправок, выполнять другим узлом то сходимость по нулям скорректирован- ного эквидистантного контура гарантируется, при этом исчезает необходимость принятия других специальных мер, например запоминание абсолютных координат точки О с выходом в эту же точку после каждой отработки программы. Положительные поправки возникают тогда, когда имеется признак сложения и знак координаты положителен, а также, когда имеется признак вычитания и знак координаты отрицателен, отрицательные поправки - когда признак сложения и отрицательный знак или признак ВЬГ-ШТ ЛЕИК и положительный знак...Аппаратно первая комбинация решается с помо1дь о элемента 22И-2ИЛИ 49, вторая - с помощью аналогичного элемента 50, выходы которых управляют элементам-г И 44,45 На фиг. 15 изображена сходимость первого и второго контуров и поправок.
Экспериментально подтвер/адена правильность этих выводов для любых как симметричных, так и несиг-даетрич- ных контуров при любых соотношениях iR и R, причем не только сходятся пб нулям контуры, но и коды остатков деления в счетчиках схем деления совпадают. Это делает возможным приме- нять устройство в простых системах, не имеющих абсолютного отсчета.
Первый коммутатор 3 состоит из четырех элементов И 70-73. Коммутируемые сигналы X, Y поступают на входы элементов И 70, 71 и 72, 73 соответственно. При подаче команды Коррекция открываются элементы И 70, 71, при подаче команды Без коррекции открываются элементы И 72, 73, Так
и 12
осуществляется коммутация ннформацми на два направления.
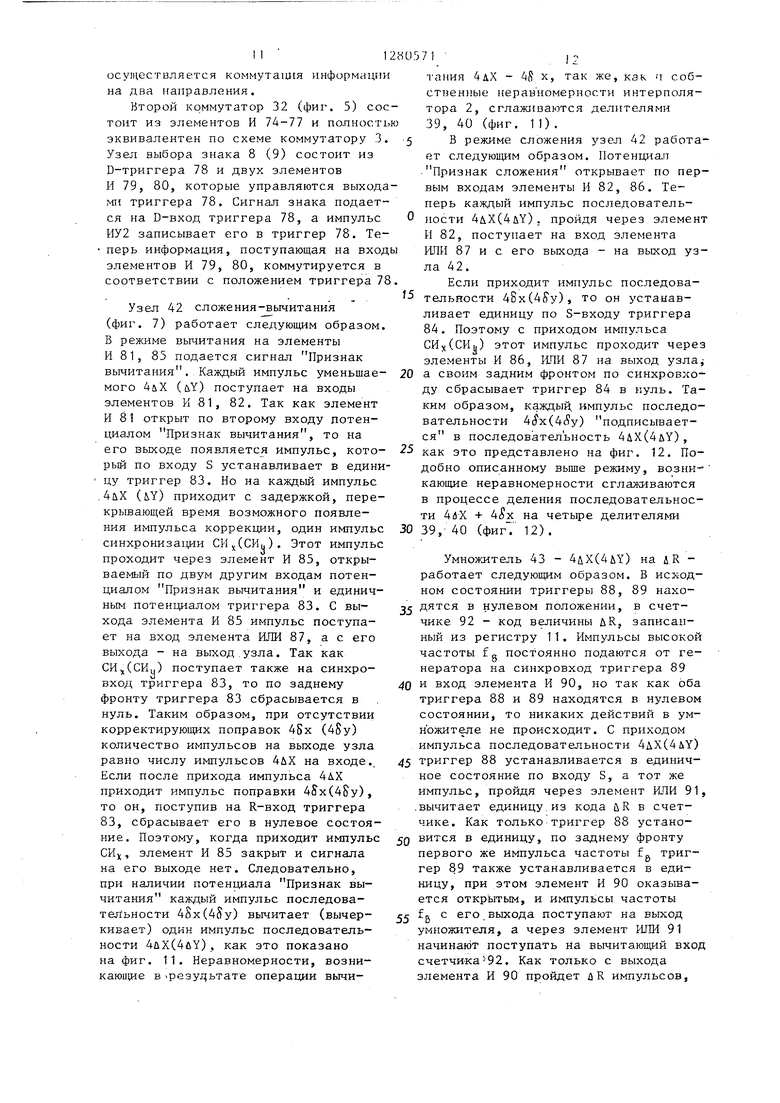
Второй коммутатор 32 (фиг. 5) состоит из элементов И 74-77 и полностью эквивалентен по схеме коммутатору 3. Узел выбора знака 8 (9) состоит из D-триггера 78 и двух элементов И 79, 80, которые управляются выходами триггера 78. Сигнал знака подается на D-ВХОД триггера 78, а импульс ИУ2 записывает его в триггер 78. Теперь информация, поступающая на входы элементов И 79, 80, коммутируется в соответствии с положением триггера 78
Узел 42 сложения-вычитания (фиг. 7) работает следуюЕ4ИМ образом. В режиме вычитания на элементы И 81, 85 подается сигнал Признак вычитания. Каждый импульс уменьшаемого 4йХ (uY) поступает на входы элементов И 81, 82. Так как элемент И 81 открыт по второму входу потенциалом Признак вычитания, то на его выходе появляется импульс, который по входу S устанавливает в едини- цу триггер 83. Но на каждый импульс 4йХ (Y) приходит с задержкой, перекрывающей время возможного появления импульса коррекции, один импульс синхронизации СИ(СИц). Этот импульс проходит через элемент И 85, открываемый по двум другим входам потенциалом Признак вычитания и единичным потенциалом триггера 83. С выхода элемента И 85 импульс поступает на вход элемента ИЛИ 87, ас его выхода - на выход.узла. Так как СИу(СИу) поступает также на синхро- вход триггера 83, то по заднему фронту триггера 83 сбрасывается в нуль. Таким образом, при отсутствии корректирующих поправок 4Sx (4Sy) количество импульсов на выходе узла равно числу импульсов 4ЛХ на входе. Если после прихода импульса 4ЛХ приходит импульс поправки 4S x(4Sy), то он, поступив на R-вход триггера 83, сбрасывает его в нулевое состояние. Поэтому, когда приходит импульс CHj, элемент И 85 закрыт и сигнала на его выходе нет. Следовательно, при наличии потенциала Признак выитания каждый импульс последоваельности 48х(45у) вычитает (вычеривает) один импульс последовательности 4йХ(4лУ), как это показано на фиг. 11. Неравномерности, возни- аюище в фезуцьтате операции вычи
тания 4дХ - 4S X, так же, как п собственные яерав номерности интерполятора 2, сглаживаются делителями 39, 40 (фиг. 11).
5 В режиме сложения узел 42 работает следующим образом. Потенцишт .Признак сложения открывает по первым входам элементы И 82, 86. Теперь каждый импульс последователь- 0 ности 4iX(4uY). пройдя через элемент И 82, поступает на вход элемента ИЛИ 87 и с его выхода - на выход узла 42.
Если приходит импульс последова -5 тельности 4Sx(4S y), то он устанавливает единицу по S-входу триггера 84. Поэтому с приходом импульса СИх(СИл) этот импульс проходит через элементы И 86, ИЛИ 87 на выход узла,0 а своим задним фронтом по синхровхо- ду сбрасывает триггер 84 в нуль. Таким образом, каждыр импульс последовательности (45у) подписывается в последовательность 4iX(4uY),
2-5 как это представлено на фиг. 12. Подобно описанному выше режиму, возни- кающие неравномерности сглаживаются в процессе деления последовательности 4йХ + 4(х на четыре делителями
30 39,- 40 (фигТ 12).
Умножитель 43 - 4uX(4uY) на Д,К - работает следуюсщм образом. В исходном состоянии триггеры 88, 89 нахог дятся в нулевом положении, в счетчике 92 - код величины ДК, записанный из регистру 11 о Импульсы высокой частоты fg постоянно подаются от генератора на синхровход триггера 89
0 и вход элемента И 90, но так как оба триггера 88 и 89 находятся в нулевом состоянии, то никаких действий в умножителе не происходит. С приходом импульса последовательности 4дХ(4&) триггер 88 устанавливается в единичное состояние по входу S, а тот же импульс, пройдя через элемент ИЛИ 91, вычитает единицу.из кода uR в счетчике. Как только триггер 88 установится в единицу, по заднему фронту первого же импульса частоты f триггер 89 также устанавливается в единицу, при этом элемент И 90 оказывается открытым, и импульсы частоты fg с его выхода поступают на выход умножителя, а через элемент ИШ1 91 начинают поступать на вычитающей вход счетчи-ка 92. Как только с выхода элемента И 90 пройдет лК импульсов.
5
0
5
131
на fjbixoflc счетчика 92 появится импульс переполнения, который по переднему фронту устанавливает в нуль триггер 88, и, следовательно, по заднему фронту того же импульса частоты f. триггер 89 сбрасывается в нуль и закрывает элемент И 90. На каждый импульс последовательности 4лХ(4&) на выходе умножителя 43, или на выходе элемента И 90, получается количество импульсов R, (см, фиг, 13), Тот же импульс переполнения счетчика 92, который сбросил в нуль триггер 33, через элемент 93 задержки поступает на вход (L) записи счетчика 92 и записывает в него код iR, Таким образом, на выходе умножителя получается ЬК импульсов, следовательно, после поступления 4йХ (4д) импульсов на выходе получается 4uXuR (4&YAR). Сиг нал запрета, поступающий на вход элемента И 90 с выхода триггера 95 формирователя 41, исключает задание слишком большого uR,
Формирователь 41 сигнала синхронизации СИ)((СИ(|) (фиг. ) работает следующим образом, В исходном состоянии триггеры 94 и 95 - в нулевом состоянии по сигналу предварительной установки (НУ), поэтому элемент И 96 закрыт. В счетчике 97 находится код максимальной для конкретного устройства величины i R, т, е, йRд,(Jц, - При приходе импульса последовательности 4йХ (4iY) на единичный вход триггера 94 последний устанавливается в единицу. Тогда по заднему фронту ближайшего импульса высокой . частоты fg, триггер 95 также устанавливается в единицу и открывает элемент И 96, В результате на его выходе появляются импульсы, которые поступают на вычитающий вход счетчика 97. Если в счетчике записан код 10, то одиннадцатый импульс является импульсом переполнения. Этот импульс и является необходимым сигналом СИ,((СИц.), так как он всегда вырабатывается позже, чем заканчивается пачка импульсов uR (см,фиг.13). Кроме того, этот импульс через элемент 98 задержки поступает па вход L записи счетчика 97, вновь записывается код й ,о|к, г который жестко запаян перемычками на входах счетчика 97.
Так как формирователь 41 при нормальной работе устройства, правиль28057114
10
ном задании величин R и R всегда включается позже, чем умножитель 43, то сигнал запрета, пoдaвae ый с выхода триггера 95 на элемент И 90, 5 исключает отработку коррекции, большей t: R,, , т..е, неисправимЕ.ш брак
МД КС
детали.
Узлы деления 46, 47 (фиг, 10) работают следующим образом. Первоначально импульсом предварительной записи ИУ1 через элемент ИЛИ 100 в счетчик 99 записывается величина R - t, где R - радиус расчетной фре, зы. Величина R - 1 или заносится
непосредственно с пульта 10 в регистр 12, или получается в регистре 12 вычитанием единицы из величины R, но в этом случае ре -истр 12 выполняется на счетчиках. Во время работы на вычитающий вход счетчика 99 поступают пачки импульсов последо атель- ности 4iX;iR (4uYAR) . Когда количество импульсов на входе счетчика ока25 зывается равным R, на выходе появляется импульс переполнения, который представляет собой импульс последовательности 4Sx, (4Sy) (см,фиг.13), Каждый выходной импульс через элемент. И 101 и элемент ШШ 100 поступает
20
30
на вход L записи счетчика и записывает в него код R - 1,
Формула изобретения
35
Устройство для программного управления, содержащее последовательно соединенные блок ввода программы и интерполятор, а также первый и вто40 рой делители, первый и второй узлы выбора знака и по каждой координате последовательно соединенные блок управления приводом, привод и исполнительный двигатель, причем второй и
45 третий выходы блока ввода программы подсоединены к первым входам первого и второго узла выбора знака соответственно, а первый выход интерполятора подключен к входу блока ввода
50 программы и вторым входам узлов выбора знака, отличающееся тем, что, с целью обеспечения возможности реализации в системах ЧПУ с линейным интерполятором функции коррек55 uJiH эквидистант, представляющих собой ломаную линию, в устройство дополнительно введены первый коммутатор, первый и второй элементы ИЛИ, первый и второй RS-триггеры, третий элемент
ИЛИ, элемент НЕ, первый и второй элементы И, четвертый элемент ИЛИ, третий и четвертый элементы И, пятый элемент ИЛИ, пульт коррекции, регистр AR и регистр R, генератор и по каждой координате блок коррекции программы, состоящий из второго коммутатора, третьего RS-триггера, шестого, седьмого, восьмого и девятого элементов ИЛИ, пятого, шестого, седьмого и восьмого элементов И, третьего и четвертого делителей,формирователя сигналов синхронизации,умножителя, первого и второго узла деления и узла сложения-вычитания,первого и второго элементов 2-2И-2ШШ, причем четвертый и пятый выходы блока ввода программы соединены с единичными входами первого и второго RS-триггеров, второй и третий выходы интерполятора подключены к первому и второму входам первого коммутатора, четвертый выход интерполятора подключен к нулевым
входам первого и второго RS-триггеров и к входам установки первого и второго узлов деления, первый и второй выходы первого коммутатора соединены с входами первого и второго делителей частоты, выходы которых подключены к входам первого и второго элементов ИЛИ, третий и четвертый выходы первого коммутатора соединены с вxoдa и первого и второго элементов ИЛИ, выходы которых подключены к
третьим входам первого и второго узлов выбора знака, первого и третьего ; элементов И, единичный выход второго RS-триггера соединен с вторым входом . третьего элемента ИЛИ и,с первьми входами второго и четвертого элемен-
тов И, выход третьего элемента ИЛИ подключен к вгсоду элемента НЕ, к третьему входу первого коммутатора и к первым входам вторых коммутаторов обоих блоков коррекции лрограм-- мы, выход элемента НЕ с четвертым входом первого {соммута- тора и с вторыми входами вторых коммутаторов обоих блоков коррекции программы, первая группа выходрв пульта коррекции подключена к входам регистра uR, а вторая группа выходов - к входам регистра R, выход
знака минус uR пульта коррекции соединен с вторыми входами второго и третьего элементов И, выход знака плюс iR пульта коррекции соединен с вторыми вxoдa ш первого и четвертого
5
0
5
0
5
0
элементов И, выходы регистра и R подключены к первым входам узла умножения обоих блоков коррекции программы, а выходы регистра R - к первым входам первого и второго узлов деления обоих блоков коррекции программы, выходы первого узла выбора знака соединены с третьим и четвертым входами второго коммутатора блока коррекции программы координаты X, выходы второго узла выбора знака подключены к третьему и четвертому входам второго коммутатора блока коррекции программы координаты Y,выходы -первого и второго элементов И подключены к входам четвертого элемента ИЛИ, выход которого соединен с первыми входами узла сложения-вычитания и входами первого и второго элементов 2-2И-2ИЛИ обоих блоков коррекции программы, выходы третьего и четвертого элементов И подключены к входам пятого элемента ИЛИ, выход которого соединен с вторыми входами узлов сложения-вычитания и входами первого и второго элементов 2-2И-2ИЛИ обоих блоков коррекции программы, первый и второй выходы второго коммутатора подключены соответственно к R- и S-входам третьего RS-триггера и входам шестого элемента ИЛИ, третий и четвертый выходы второго ком- мута гора подключены соответственно к входам седьмого и восьмого элементов РШИ, выходы которых соединены с входами блока управления приводами координаты X, входы блока управления приводами координаты Y соединены с аналогичными выходами блока коррекции программы координаты Y, единичный выход третьего RS-триггера подключен к входам пятого элемента И и входам первого и второго элементов 2-2И-2ИЛИ, нулевой выход третьего
входом шесто- с входами
RS-триггера соединен с го элемента И, а также
первого и второго элементов 2-2И-2ИЛИ выход шестого элемента ИЛИ подключен к первому входу формирователя сигналов синхронизации, к второму входу умножителя и третьему входу узла сложения-вычитания,выход которого . подключен к входам пятого и шестого элементов И, первый выход формирователя сигналов синхронизации подклю- чей к четвертому входу узла сложе- ния-вычита шя, второй вход - к третьему входу умножителя, выход умножителя соединен с первьми входами седьмо- -ла сложения-вычитания, выходы пятого го и восьмого элементов И, вторые и шестого элементов И соединены с входы которых соединены с выходамр входагда третьего и четвертого дели- второго и первого элементов 2-2И-21ШР1 телей частоты, выходы которых под- а выходы седьмого и восьмого злемеп- 5 ключены к входам седьмого и восьмого тон И подключены к вторым входа.м первого и второго узлов деления соответственно, в ыходы которых подключены к входам девятого элемента ИЛИ, выход
элементов ИЛИ соответственно, выход генератора соединен с вторым входом формирователя сигналов синхронизации и четвертым входом умножителя
которого соеданен с пятым входом уз- 30 обоих блоков коррекции программы.
-ла сложения-вычитания, выходы пятого и шестого элементов И соединены с входагда третьего и четвертого дели- телей частоты, выходы которых под- ключены к входам седьмого и восьмого
элементов ИЛИ соответственно, выход генератора соединен с вторым входом формирователя сигналов синхронизации и четвертым входом умножителя
Фаё,1
/ЙГ
н
Фаг.3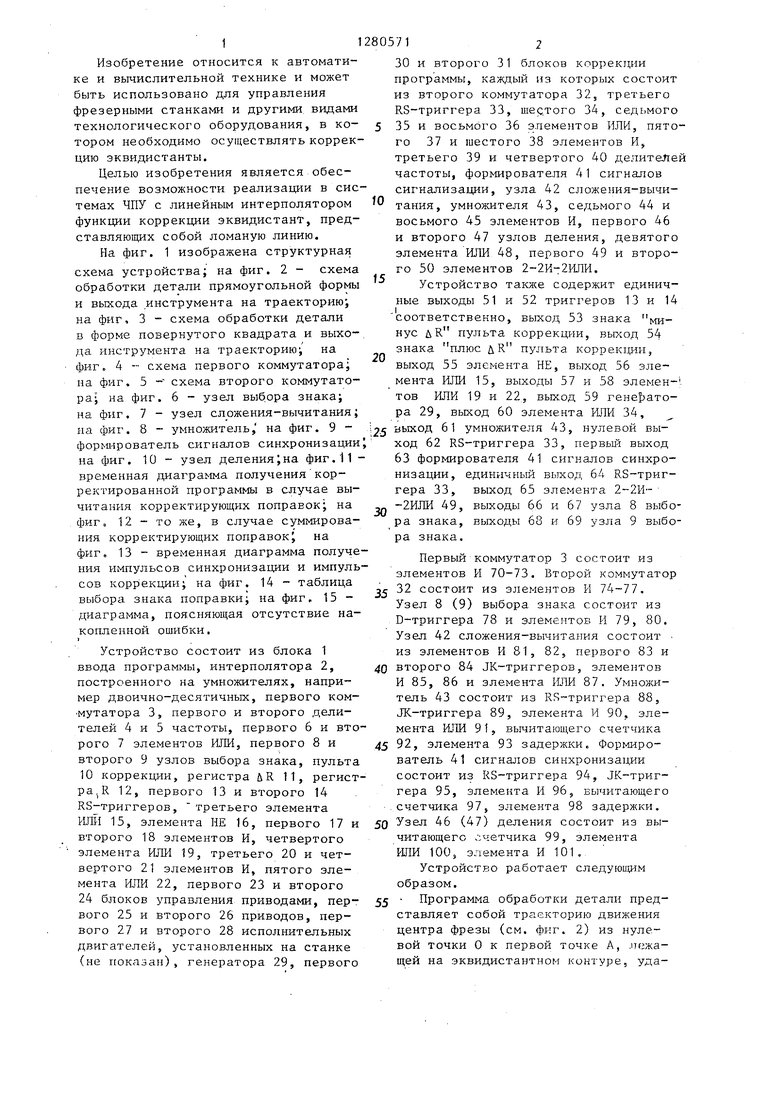


| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1984 |
|
SU1246053A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для программного управления | 1984 |
|
SU1255993A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
Изобретение относится к области автоматики и вычиcлvIтeльнoй техники и может быть использовано для управления фрезерными станками и другими видами-технологического оборудования, в которых необходимо осуществлять коррекцию эквидистанты. Целью изобретения является обеспечение возможности реализации в системах числового программного управления с линейным интерполятором функции коррекции эквидистант, представляющих собой ломаную линию. Простота прог- рамьшрования достигается за счет того, что точка О, в которой находится инструмент перед выходом на зк- ввдистантную траекторию, выбирается на расстоянии по нормали к эквидистантному контуру. В кадре, в котором задано перемещение ОА, задается команда, обратная участку контура, на которой необходимо выйти. Так, для внешних контуров задается признак внутреннего колтура, для внутренних контуров задается признак внешнего контура, в результате устройство вычисляет поправки и знаки, выводит инструмент вместо точки А в точку А . Та же команда задается при возврате из точки А в точку 0. 15 ил. i (Л го 00 СП 
ФигЛ
Фаг. 5
X(-if)
+УЫ
Фиг. 6
J7
Вым9
&К
с«
32
Викой лК-лХ
Фие.в
аГ/
i-ta-tx
1
Stfxty J osi,
1%;
лХ-tK tlf S
Л.
лЯ, 4лХ
W iRiHOOL
лк
лЯтал
Фй
Редактор И.Рыбченко
Составитель А.Исправникова
Техред И.Попович Корректор С.Шекмар
Заказ 7065/52Тираж 836Подписное
ВНИИГШ Государственного ко штета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0at. а
| КОММУТАТОР ДЛЯ ПРЕРЫВАНИЯ ТОКА В ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫХ ПРИЕМНИКАХ ЭЛЕКТРИЧЕСКОГО ТОКА | 1922 |
|
SU550A1 |
| Разработ | |||
| фирмы Сименс АО | |||
| Кузнецов С.П | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электроавтоматика станков | |||
| Способы подготовки программ и интерполятор для контурных систем число- Borq управления станками | |||
| М.: Машиностроение, 1970, с, 71-79, | |||
