Изобретение касается устройств для перемещения изделий в двух Г1за)мнс-перпепдикулярных направлениях. Эти устройства состоят из ряда принудительно вращаемых роликов и пальцев, распо,:ю/кс1п;ых между роликами и предназначенных для неремешения изде/ип вдоль
)ОЛИКОВ.
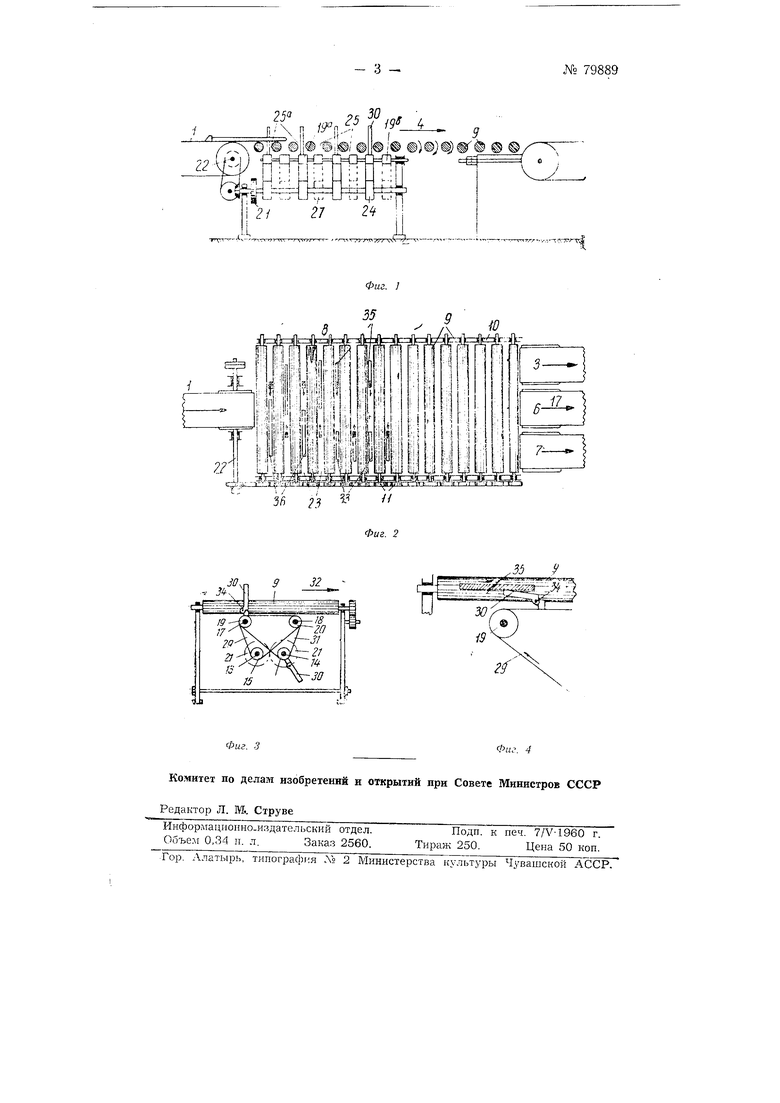
На фиг. изображено устройство в продольном разрезе; на фиг. 2-устройство в плане; на фиг. 3-ycTpoiicTBo в поперемиом разрезе; на фиг. 4-илапки.
С подаюн1,его транспортера / изделия выталкнр.ается па устройство 2, которое не только перемещает х в направлении стрслк ; о к выносным транспортером 4,5 и 5, но одпо ремен о и иерелви|-ает их в ионеречно.м направлении. Устройство 2 состоит из роликов 7, вра1иа опи1хся в подшипниках, укрепленных на 8. Ролики 7 вращаются по часовой стрелке н приводятся в движен1ге от устройства 9. Механизм, передвигаюнхий изделия в поперечном направлеппи, имеет два ведунтих вала 10 н //, на каждом из которых укреплены звездочки 12 и 13. Над валами 10 и // непосредственно под роликалш 7 установлены две неподвижные оси 14 и 15, на которые свободно насажены звездочки 16 и /7. Валы 10 и // при помощи посаженных на них и иаходян1ихся во взаимном сцеплении шестерен 18 ир1июдятся во вращение в разных направлениях от вала 19 транспортера / через приводное устройство, включающее в себя цепную передачу и коническую нару шестерен, bia осях 14 и 15 звездочки 16 и 17 расноложены под кажды.м просветом 20 между роликами 7, а на валах 0 и 11 звездочки укреплены так, что звездочки 21 вала 10 расположены, например, TO.ibKO под четными просветами 22 между роликами (т. с. через один просвет), а звездочки 23 вала // расположепы то.иько под нечетными гфосветам;; между роликами. Цепи 24 с пальцами 25 укХо 79889- 2 -
реплены по одному на каждой цепи и при движении ее входят в четные просветы 22 между роликами 7, а на звездочки 23 надеты цепи 26, ггальцы которых при ее движении входят в нечетные просветы между роликами 7 рольганга и движутся в направлении, обратном движению пальцев, усрсплеииых на цепях 24. Пальцы 25, укрепленные на цепи 24, двигают трафарет в нанравлении стрелки 27, а нальцы цепи 26-в противоположном направлении.
Первый трафарет при входе на устройство 2 роликами 7 последнего увлекается вперед. В подходящий момент на поверхность устройства через просветы 22 выходят пальцы 25 и продвигают трафарет в поперечном направлении по стрелке 27 до тех пор, пока ось трафарета не совместится, с осью траиспортера 6. В этот момент нальцы 25 приходят в соприкосновение с неподвижными планками 28, устаиовле1 ным1 между роликами 7 и находящимися ниже рабочей поверхпостп устройства. Так как палец 25 имеет luapin-ip 29, позволяющий пальцу отклоняться в паправлении, обратном его движению, а также пружину, удерживаюп.1,ую палец в неотк.юпенпом положении, то ири встрече с планко11 2S палец 25, преодолевая сопротнвление нружины своего шарнира, отклонится назад в положение пиже рабочей поверхности устройства и прекратит взаимодействие с трафаретом в момент совмещения оси последнего с осью транснортера. Чтобы те пальцы 25 п.епи 24 (или 26), с которыми трафарет уже прекратил взаимодействие или еи1,е пе вступил во взаимодействие, не мешали движению других трафаретов, .находящихся па устройстве и движущихся к другим тра.чспсртерам, между роликами устройства установлены неподвижные планки 30 и ./.
Планкп 30 при подъеме цепью (например 24, пальца 25 вверх удержнвают палец в отклоненном положении до тех пор, пока изделие не пройдет всей длипы планки 30.
Предмет изобретепия
1. Устройство для перемещения изделий в двух взаимно-иерпендикулярпых направлепиях, состоящее из ряда принудительно вращаемых роликов и пальцев, расположенных между роликами и предназначенных для перемещения изделий вдоль роликов, отличающееся тем. что иодпружиненг)ые пальцы, шарнирно укренленные на бескоиечиых цепях, находятся во встречном движении, с целью нередачи изд,елий на ряд выносных боковых транспортеров.
2.Форма выполнения устройства, по п. 1, отличающаяся тем, что, с целью прекращения взаимодействия пальцев с продвигаемым изделием в момент совмещения оси изделия с осью бокового выносного траисиортера, нрнмепены неподвижные нланки, расноложенные между роликами, отклоняющие пальцы в положение ниже уровня рабочей поверхности устройства.
3.Форма вынолненпя устройства по пп. 1 и 2, отличающаяс я тем, что применены планки, с целью удержания пальцев в отклоненном положении до момента прохождения изделием всей длины планки.