(54) ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер водителя транспортного средства | 1980 |
|
SU909674A2 |
| Тренажер водителя транспортного средства | 1988 |
|
SU1661821A2 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| Тренажер для обучения водителя транспортного средства | 1985 |
|
SU1320834A1 |
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Устройство для обучения водителей транспортных средств | 1987 |
|
SU1531126A1 |
1
Изобретение относится к обучающим устройствам и может найти применение , в частности, при подготовке и проверке квалификации водителей в организациях ГАИ, ДОСААФ и т.д.
Известен тренажер водителя транспортного средства, содержащий кабину с органами управления, устройство имитации поступательного движения и устройство отображения информации pLl Однако устройства имеют ограниченную точность в процессе обучения профессиональным навыкам.
Известен также тренажер, содержащий рабочее место водителя, оборудованное сидением, органами управления автомобилем, соединенными с датчиками, блоком индикации скорости движения и частоты вращения двигателя . ,
Недостаток тренажера - низкая точность имитации процессов, происходящих в двигателе внутреннего сгорания, муфте сцепления и коробке перемены передач, а также ограниченные функциональные, возможности из-з отсутствия имитации движения .по до.роге сложного вертикального профиля
Наиболее близким к предлагаемому является тренажер, содержащий органы управления, датчики, блоки моделирования реальных процессов, блок
ввода программы обучения, блок отображения и регистрации учебной информации 1з.
Однако тренажер имеет ограниченную точность, в связи с ограниченностью
контролируемых параметров, характеризующих уровень профессиональной подготовки водителя транспортного средства.
Цель изобретения - повышение точ- .
ности устройства и расширение его функциональных возможностей путем имитации движения по дороге сложного вертиксшьного профиля.
Указанная цель достигается тем,
что в известный тренажер, содержащий органы управления, связанные с датчиками обратной связи, блоки моделирования реальных процессов, блок ввода программы обучения и
блок индикации, введены блок интегрирования и формирователь сигналов изменения критических параметров учебного процесса, подключен|НЫй ко входу первого блока моделиро
:вания реальных процессов и к выходам блока ввода программы обучения и блока интегрирования, который через последовательно, включенные первый, второй и третий блоки моделирования реальных процессов соединен с выходом четвертого блока моделирования реальных процессов, выходы Первого и четвертого блоков моделирования процессов подключены к блоку индикации, входЫ
второго, третьего ичетвертого блоков моделирования реальных процессов соединены с вв кодами соответствукадих датчиков обратной связи, выход второго блока моделирования реальных процессов подключен ко входу третьего блока моделирования реальных процессов, выход которого соединен со входом четвертого блока моделирования реальных процессов.
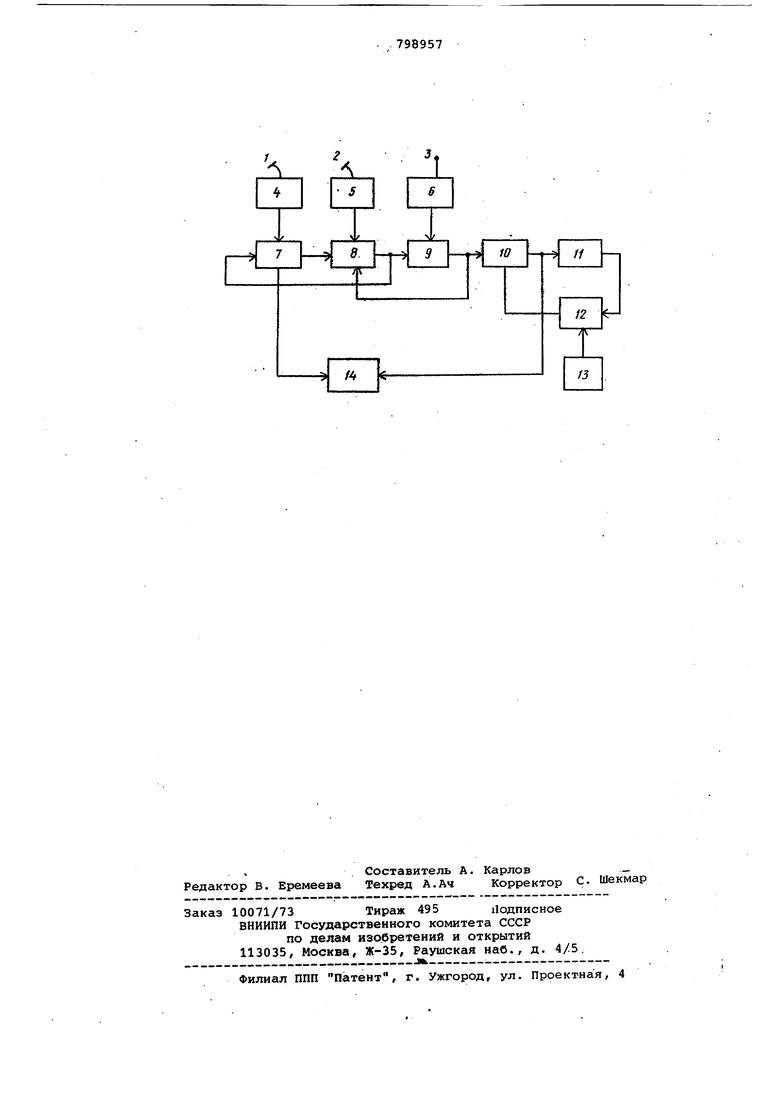
На чертеже приведена структурная схема тренажера.
Тренажер содержит органы 1, 2 и 3 управления (педали 1 газа, сцепления 2,рычаг 3 переключения передач), соединенные, соответственно , с датчиками 4,5 и б обратной связи (положения педали 4 газа, положения педали 5 сцепления и положения рычага 6 переключения передач) , а также последовательно соединенные блоки 7/8, 9 и 10 моделирования реальных процессов (двигателя 7, муфты 8 сцепления, коробки 9 переменных передач, динамики 10 поступательного движения),блок 11 интегрирования (пройденного пути) и формирователь 12 сигналов изменения критических паранютров учебного процесса (например, задания вертикального профиля дороги),а также блок 13 ввода nporpaMNW обучения и блок 14 индикации.
Выходы датчиков 4, 5 и 6 соединены, соответственно, с входами блоков моделирования 7, 8 и 9.
Тренажер водителя транспортного средства работает следующим образом.
При подаче питания,начинают работать блоки 7 - 10 и 14.
Когда обучаемый воздействует на органы 1, 2 и 3 управления, то в блоках 7-10 начинаются процессы, аналогичные процессам в реальном транспортном средстве, что вызывает изменение аналогов скорости движения и частоты вращения двигателя.
По мере движения блок 11 воздействует на формирователь 12, что приводит к изменению параметров движения.
При воздействии на блок 13 происходит смена закона изменения вертикального профиля дороги в соответствии с изменением условий обучения.
Таким образом, в предлагаемом устройстве достигается повышение качества обучения, вследствие повышения точности имитации и расширения функциональных возможностей за счет имитации движения по дороге сложного вертикального профиля, чем повышается точность процесса обучения профессиональным навыкам водителей транспортного средства.
Формула изобретения
Тренажер водителя транспортного средства, содержащий органы управления, связанные с датчиками обратной связи, блоки моделирования реальных процессов, блок ввода программы обучения и блок индикации, отличающийся тем, что, с целью повышения точности устройства, он содержит блок интегрирования и формирователь сигналов изменения критических параметров учебного процесса, подключенный ко входу первого блока моделирования реальных.
.J процессов и к выходам блока ввода программы обучения и блока интегрирования, который через последовательно включенные первый, второй и третий блоки моделирования реальных процессов соединен с выходом четвертого блока моделирования реальных процессов, выходы первого и четвертого блоков моделирования реальных процессов подключены к бло-,. ку индикации, входы второго, третьего и четвертого блоков моделирования реальных процессов соединены с выходами соответствующих датчиков обратной связи, выход второго блока моделирования реальных
f процессов подключен ко входу третьего блока моделирования реальных процессов, выход которого соединен со входом четвертого блока моделирования реальных процессов.;
Источники информации,
принятые во внимание при экспертизе
