(54) ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА


| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер водителя транспортно-гО СРЕдСТВА | 1979 |
|
SU798957A1 |
| Тренажер водителя транспортного средства | 1988 |
|
SU1661821A2 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
| Устройство для обучения водителей транспортных средств | 1987 |
|
SU1531126A1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| Групповой тренажер психофизиологических качеств водителя | 1988 |
|
SU1560100A1 |
| Тренажер оператора систем управ-лЕНия | 1978 |
|
SU822231A2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Устройство для обучения водителей транспортных средств | 1985 |
|
SU1427409A1 |
| ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2007762C1 |

1
Изобретение относится к обучакщим устройствам, может найти применение в частности, при профессиональной подготовке и проверке квалификации водителей.
По основному авт. св. № 798957 известен тренажер водителя транспортного средства,, содержащий органы управления, связанные-с датчиками обратной связи, блоки моделирования реальных процессов, блок ввода программы обучения, блок индикации, блок интегрирования и формирователь сигналов изменения критических параметров учебного процесса, подключенный ко входу первого блока моделирования реальных процессов и к выходам блока ввода программы обучения и блока интегрирования, который через последовательно включенные первый, второй и третий блоки моделирования реальных процессов соединен с выходом четвертого блока моде;шрования реальных процессов, выходы первого и четвертого блоков моделирования реальных процессов подключены к блоку индикации, входы второго, третьего и четвертого блоков моделирования реальиых процессов соединены с выходами соответствующих датчиков обратной связи, выход второго блока моделирования реальных процессов подключен ко входу третьего блока моделирования реальных процессов, выход которо10го соединен со входом четвертого блока моделирования реальных процес-.. сов Dl
Недостаток известного тренажера заключается в том, что он не по15зволяет производить оперативный объективный контроль правильности действий обучаемого водителя, что существенно снижает качество обучения навыкам вождения.
20
Цель изобретения - повышение качества обучения навыкам вождения.
Указанная цель достигается тем, что тренажер водителя, транспортно390го средства снабжен блокаьш регистрации ошибок, сравнения, дифференцирования, вычисления оптимального номера передачи и схемой И, подключенной выходом к одному из входов блока регистрации ошибок, к другим входам которого подключены выходы блоков сравнения, одни из входов трех из которых соединены с выходом .блока ввода программы обучения, входы четвертого блока сравнения подключены к выходам соответственно датчика обратной связи, связанного с рычагом переключения передач и дополнительно соединенного через блок дифференцирования с одним из выходов схемы И, и блока вычисления оптимального номера передачи, ко входам которого подключены выходы формирователя сигналов изменения критического пара- го метра учебного процесса и первого блока моделирования реальных процес сов, соединенного дополнительно вых дом с другим входом одного из трех блоков сравнения, вторые входы других двух из которых соединены с вых дами четверт(го блока моделирования реальных процессов, причем второй вход схемы И соединен с датчиком обратной связи, связанньтм с педалью сцепления. На чертеже представлена структур ная схема предлагаемого тренажера. Тренажер содержит педшш I и 2 соответственно газа и сцепления, ры чаг 3 перемены передач, датчики 4-6 обратной связи положения указанных органов управления, блоки 7-9 моделирования реальных процессов соотве ственно двигателя, муфты сцепления и коробки перемены передач, блок 10 моделирования динамики поступате ного движения, блок 11 интегрирования, формирователь 12 сигналов изме нения критических параметров учебного процесса блок I3 ввода програм мы обучения, блок 14 индикации, а также блок 15 регистрации ошибок, состоящий из пяти регистраторов, в частности регистраторов 16 и 17 соответственно повьш1енной и понижен ной Скорос.ти двигателя, регистратора 18 повышенной скорости автомобиля, регистраторов 19 и 20 соответственно неправильного выбора номера передачи и неправильного переключения передачи, блоки Сравнения 44 22-24, схему И 25, блок 26 дифференцирования н блок 27 вычисления, оптимального номера передачи. Педаль I газа, педаль 2 сцепления и рычаг 3 перемены передач соответственно через датчики 4-6 обратной связи их положения соединены с блоками 7-9 моделирования реальных процессов двигателя, муфты сцепления и коробки перемены передач. Блоки 7-9 моделирования соединены следующим образом. Выход блока 7 соединен со входом блока 8, выход блока 8 - со входами блоков 7 и 9 выход блока 9 - со входом блокауВ. Блок 10 моделирования динамики поступательного движения одним из входов присоединен к/выходу блока 9 моде-, лирования реальных процессов коробки перемены передач, а вторым - к выходу формирователя 12 сигналов изменения критических параметров учебного процесса, вход которого соединен через блок 11 интегрирования с выходом блока 10моделирования. Один из выходов блока 13 ввода программы обучения подключен ко входу формирователя 12 сигналов изменения критических параметров учебного процесса. Блок индикации 14 соединен с выходами блоков моделирования 7 и 10. Регистратор 16 повышенной скорости двигателя и регистратор 17 пониженной скорости двигателя соответственно через блоки 21 и 22 сравнения соединены с выходами блока 7 моделирования реальных процессов двигателя и блока 13 ввода программы обучения. Регистратор 18 повьшенной скорости автомобиля через блок 23 сравнения соединен с выхеедами блока 10 моделирования динамики поступательного движения и блока 13 ввода программы обучения. Регистратор 19 неправильного выбора номера передачи через блок 24 сравнения соединен с выходами датчика 6 обратной связи положения рычага 3 перемены передач и блока 27 вычисления оптимального номера передачи, входы которого соединены с выходами блока 10 моделирования динамики поступательного движения и формирователя 12 сигналов изменения критических параметров учебного процесса, регистратор 20 неправильного переключения передачи через схему И 25 соединен с выходами датчика 5 обратной связи положения педали сцепления и блока 26 дифференцирования, который своим входом соединен с выходом датчика 6 обратно связи положения рычага 3 перемены
передач.
Регистраторы 16-20 ошибок могут представлять собою, например, световые табло, дублированные звуковым сигналом или без него.
Блок 26 дифференцирования может быть собран, например, на базе операционного усилителя с емкостным входом. Блок 27 вычисления оптимальОптимальные номера скоростей при скорости V,
разом.
Изменение за, педали 2 перемены пер нению сигнал 4-6 обратной в свою очере, сигналов на лирования-реальных процессов двигат.еля, муфты сцепления и коробки перемены передач, в которых протекают процессы, идентичные процессам механического движения в соответствую ющих узлах автомобиля.
Изменение аналога скорости движения автомобиля V, формируемого на выходе блока 10 моделирования-динамики поступательного движения, происходит в соответствии с законами механического движения автомобиля по дороге с цеременным вертикальным профилем.
Блоки 21-24 сравнения реализуют хара ктеристические функцнн
11 вХ,
9;,
.
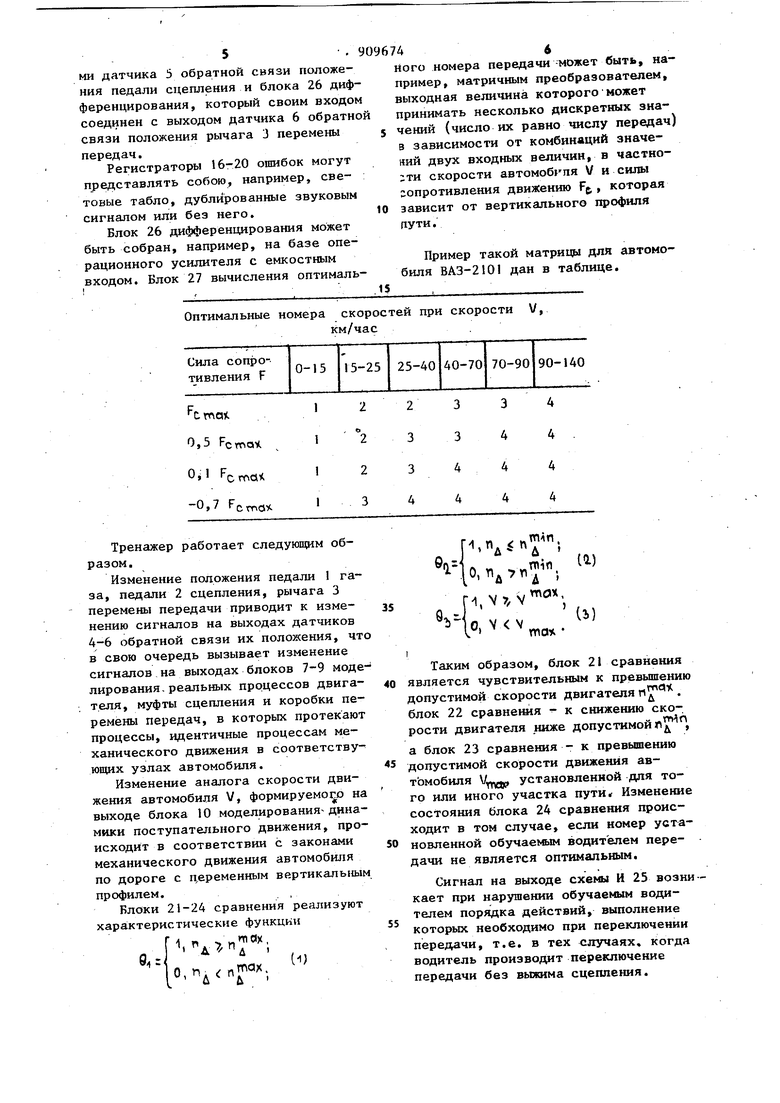
ного номера передачи-может быть, например, матричным преобразователем, выходная величина которого может принимать несколько дискретных значений (число их равно числу передач в зависимости от комбинаций значейий двух входных величин, в частности скорости автомобипя V и силы сопротивления движению F, которая зависит от вертикального профиля пути.
Пример такой матрицы для автомобиля ВАЗ-2101 дан в таблице.
км/час
является чувствительным к превышению допустимой скорости двигателя . блок 22 сравне шя к снижению скорости двигателя ниже допустимой , а блок 23 сравнения - к превышению допустимой скорости движения автомобиля установленной для того или иного участка путИ|г Изменение состояния блока 24 сравнения происходит в том случае, если номер установленной обучаемым водителем передачи не является оптимальным.
Сигнал на выходе схемы И 25 возникает при нарушении обучаемым водителем порядка действий, выполнение которых необходимо при переключении передачи, т.е. в тех случаях, когда водитель производит переключение передачи без выжима сцепления.
Изменение состояния блоков 21-24 приводит к возникиовению на их выходах сигналов i обеспечивающих возбулдение соответственно регистраторов J6-19 ошибок. Аналогичное дай ствие на регистратор 20 оказывает сигнал, возбувденный на выходе схемы И 25.
Таким образом, предлагаемый тренажер позволяет регистрировать ошибки, допускаемые обучаемым (или контролируе1 1м водителем) , Это позволяет своевременно исправить ошибки и улучшить профессиональные навыки вождения автомобиля, что приводит к уменьшению износа-механизмов, снижению аварийности, повьппению производительности и снижению расхода горючего.
Формула изобретения
i
Тренажер водителя транспортного средства по авт св. № 798957, о тличающийся тем, что, с целью повышения качества обучения навыкам вождения, он снабжен блоками регистрации ошибок, сравнения, дифференцирования, вычисления оптимального номера передачи и с; семой И, подключенной выходом к одному
из входов блока регистрации ошибок, к другим входам которого подключены выходы блоков сравнения, одни из входов трех из которых соединены с выходом блока ввода программы обучения,, входы четвертого блока, сравнения подключены к выходам соответственно датчика обратной связи, связанного с рычагом переключения
передач и дополнительно соединенного через блок дифференцирования с одним из входов схемы И, и блока вычисления оптимального номера передачи, к входам которого подключены
выходы формирователя сигналов изменения критического параметра учебного процесса и первого блока моделирования реальных процессов, соединенного дополнительно выходом
с другим входом одного из трех
блоков сравнения, вторые входы двух других из которых соединены с выходами четвертого блока моделирования реальных процессов, причем второй вход схемы И соединен с датчиком обратной связи, связанным с педалью сцепления.
Источники информации, принятые во внимание при экспертизе
