(54) СУДОВОЙ ДВИЖИТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕБНОЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2537942C2 |
| Судовой движитель | 1983 |
|
SU1232566A1 |
| ГРЕБНОЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВУЧЕГО СРЕДСТВА | 1992 |
|
RU2054360C1 |
| ГРЕБНОЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ НАДВОДНЫХ И ПОДВОДНЫХ КОРАБЛЕЙ | 2008 |
|
RU2384459C1 |
| Многокорпусное парусное судно | 1974 |
|
SU727510A1 |
| Судовой волновой движитель | 1982 |
|
SU1093621A1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2005 |
|
RU2289519C1 |
| Ведущее колесо малогабаритного транспортного средства | 2018 |
|
RU2692956C1 |

1
Изобретение относится к судострбению, а именно к судовым движителям.
Известен крыльчатый движитель Фойт-Ынайдера, где лопасти установлены вертикально и движутся по окружности, постоянно меняя угол атаки i
Наиболее близким к предлагаемому является судовой движитель, содержащий лопасти с хвостовиками, закрепленными на за.мкнутой гибкой ленте, натянутой на шкивы с ведущими и ведомыми валами 2.
Недостатком этих устройств является невозможность управления углом атаки лопастей.
Цель изобретения - обеспечение возможности управления углом атаки лопастей.
Поставленная цель достигается тем/ что судовой движитель снабжен ведущим и ведомым валами с вертикальной направляющей, закрепленной на этих валах, и горизонтальных направ;ляющих, жестко прикрепленных к корпусу судна, причем каждая лопасть шарнирно закреплена на подвижной прикрепленной к гибкой ленте опоре с роликами, взаимодействующими с горизонтальными направляющими, а хвостовик лопасти снабжен подпружиненным
рычагом с роликом, опирающимся на вертикальную направляющую с возможностью возвратно-поступательного двжения ее вдаль ведомого и ведущего валов,
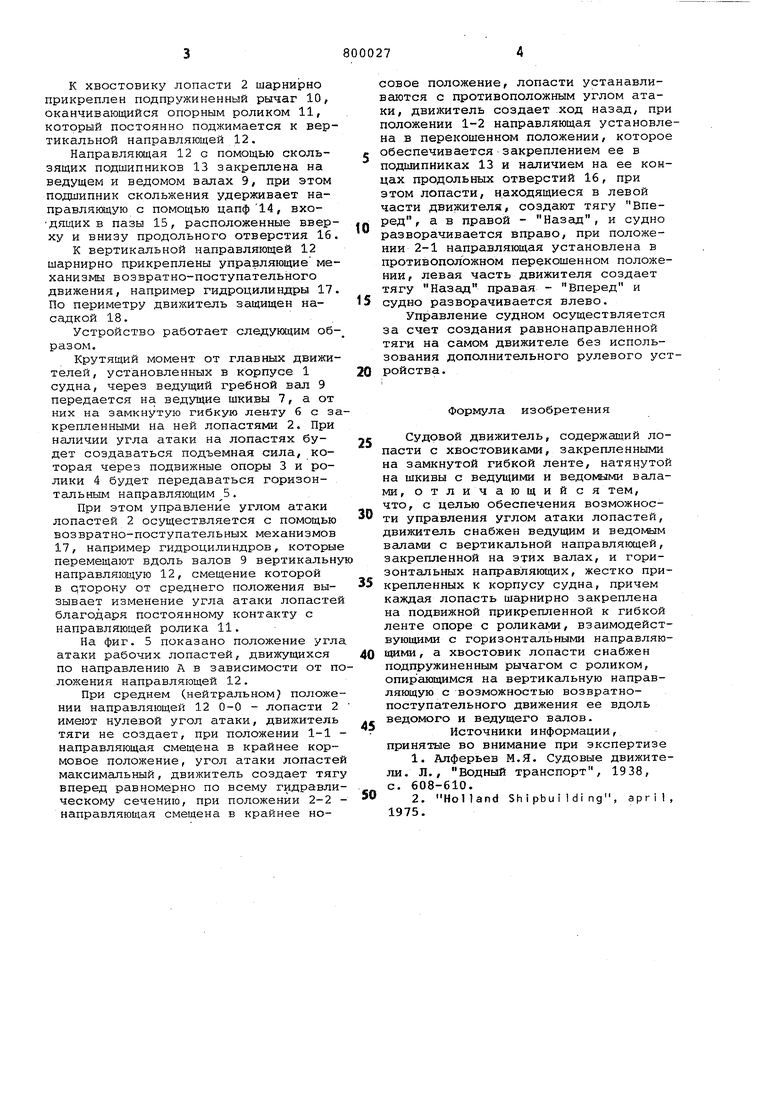
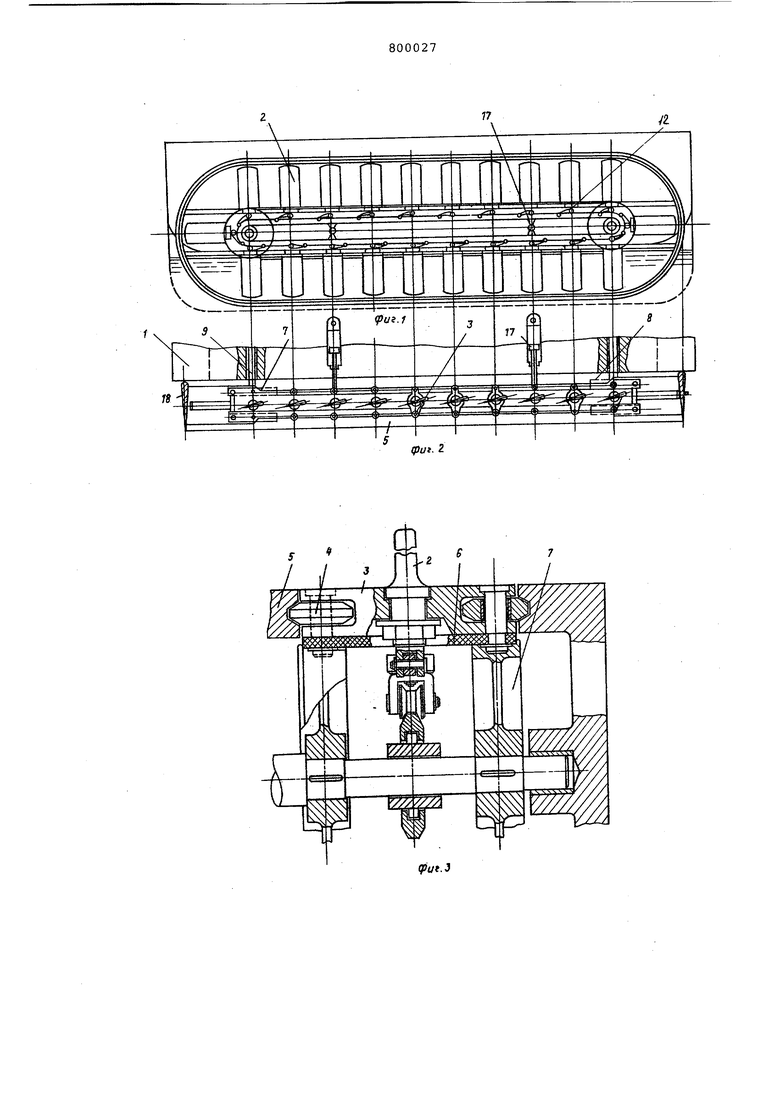
На фиг, 1 изображено устройство, вид с кормы; на фиг, 2 - то же, со снятым огргщительным кожухом, вид сверху/ на фиг, 3 - то же, сечение по ведущему валу и закрепление лопатей, на фиг, 4 - закрепление направляющей на ведущем и ведомом валах и конструктивная схема управляющего рычага лопасти, на фиг, 5 - схема положения лопастей, создающих тягу на движителе в зависимости от положения напраляющей,
Устройство смонтировано в кормовой части судна и содержит лопасти 2 аэродинамического профиля, шарнирно закрепленные на подвижных опорах 3 с роликами 4, движущимися по горизонтальным направляющим 5, жестко закрепленным на корпусе 1 судна.
Подвижная опора 3 закреплена на гибкой замкнутой ленте 6, натянутой на два ведущих 7 и два ведомых 8 шкива, разнесенных вдоль их валов 9 вращения.
К хвостовику лопасти 2 шарнирно прикреплен подпружиненный рычаг 10, оканчивающийся опорным роликом 11, который постоянно поджимается к вертикальной направляющей 12.
Направляющая 12 с помощью скользящих подшипников 13 закреплена на ведущем и ведомом валах 9, при этом подшипник скольжения удерживает направлянвдую с помощью цапф14, входящих в пазы 15, расположенные вверху и внизу продольного отверстия 16.
К вертикальной направляющей 12 шарнирно прикреплены управляющие механизмы возвратно-поступательного движения, например гидроцилиндры 17. По периметру движитель защищен насадкой 18.
Устройство работает следующим образом.
Крутящий момент от главных движителей, установленных в корпусе 1 судна, через ведущий гребной вал 9 передается на ведущие шкивы 7, а от них на замкнутую гибкую левту б с закрепленными на ней лопастями 2. При наличии угла атаки на лопастях будет создаваться подъемная сила, которая через подвижные опоры 3 и ролики 4 будет передаваться горизонтальным направляющим 5.
При этом управление углом атаки лопастей 2 осуществляется с помощью возвратно-поступательных механизмов 17, например гидроцилиндров, которые перемещают вдоль валов 9 вертикальну направляющую 12, смещение которой в сторону от среднего положения вызывает изменение угла атаки лопастей благодаря постоянному контакту с направляющей ролика 11.
На фиг. 5 показано положение угла атаки рабочих лопастей, движущихся по направлению А в зависимости от положения направляющей 12.
При среднем (нейтральном} положении направляющей 12 0-0 - лопасти 2 имеют нулевой угол атаки, движитель тяги не создает, при положении 1-1 направляющая смещена в крайнее кормовое положение, угол атаки лопастей максимальный, движитель создает тягу вперед равномерно по всему гидравлическому сечению, при положении 2-2 направляющая смещена в крайнее носовое положение, лопасти устанавливаются с противоположным углом атаки, движитель создает ход назад, при положении 1-2 направляющая установлена в перекошенном положении, которое обеспечивается закреплением ее в подшипниках 13 и наличием на ее концах продольных отверстий 16, при этом лопасти, находящиеся в левой части движителя, создают тягу Вперед, а в правой - Назад, и судно разворачивается вправо, при положении 2-1 направляющая установлена в противоположном перекошенном положении, левая часть движителя создает тягу Назад правая - Вперед и судно разворачивается влево.
Управление судном осуществляется за счет создания равнонаправленной тяги на самом движителе без использования дополнительного рулевого устройства.
Формула изобретения
Судовой движитель, содержащий лопасти с хвостовиками, закрепленными на замкнутой гибкой ленте, натянутой на шкивы с ведущими и ведомыми валами, отличающийся тем, что, с целью обеспечения возможности управления углом атаки лопастей, движитель снабжен ведущим и ведо «ва1м валами с вертикальной направляющей, закрепленной на этих валах, и горизонтальных направляющих, жестко прикрепленных к корпусу судна, причем каждая лопасть шарнирно закреплена на подвижной прикрепленной к гибкой ленте опоре с роликами, взаимодействующими с горизонтальными направляющими, а хвостовик лопасти снабжен подпружиненным рычагом с роликом, опирающимся на вертикальную направляющую с возможностью возвратнопоступательного движения ее вдоль ведомого и ведущего валов.
Источники информации, принятые во внимание при экспертизе
с. 608-610.
(put.J
