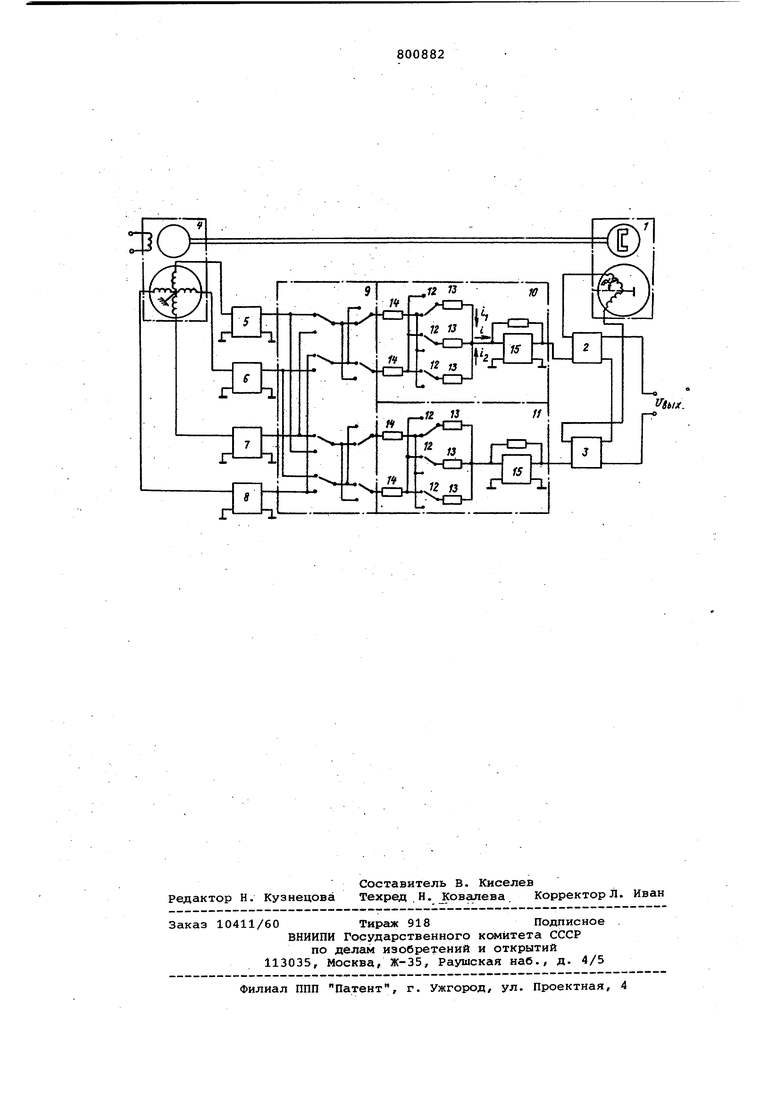
Изобретение относится к приборостроению, а именно к технике электрических измерений скорости вращения вала. Известен измеритель скорости вращения на базе,синхронного генератора датчика положения и схем преобразова ний 1. Устройство не обеспечивает достаточной точности измерения. Известен также измеритель скорост вращения, содержащий расположенные н одном валу синхронный генератор, связанный с первыми входами множительных устройств, и датчик: положения, связанный с фазочувствительными выпрямителями {2. Недостатком этого 1 мерителя екррости является зависимость выходного сигнала, т.е. крутизны, от угла рассогласования синхронного генератора и датчика положения, вызванного неточностью взаимной выставки мгшшн в пространстве. Известен измеритель скорости вра щения, у которого множительные устройства выполнены на резисторах и к.гаочах. Недостатком устройства является .неточностьвыставки машин, что прив ит к увеличению пульсаций в выходном напряжении измерителя скорости. Цель изобретения - повышение стабильности крутизны и уменьшение ульсации, вызванной ошибкой взаимной выставки машин в пространстве. Указанная цель достигается тем, что измеритель скорости вращения снабжен связанным с Фазочувствительными выпрямителями коммутатором и фа,зосдвигающими устройствами, входы которых соединены с выходами коммутатора, а выходы связаны со вторыми входами множительных устройств. Каходое фазосдвиггиодее устройство выполнено на ключах и снабжено основными резисторами, величины споротивлений которых распределены по двоичному закону, подключенными к выходу ключей дополнительными резисторгими, включенными между входами ключей и выходами коммутатора, и преобразователем тока в напряжение, вход крторого соединен с основными резисторами, а выход .- со вторым входом соответствующего множительного устройства. На чертеже изображена схема устройства. Устройство содержит расположенны на одном валу синхронный генератор связанньй с множительными устройствами 2 и 3, и датчик положения 4, связанный С фазочувствительными выпрямителями 5-8. Кроме того, оно со держит связанный с фазочувствительными выпрямителями коммутатор 9 и фазосдвигающие устдойстра Ю и 11, входы которых соединеныс выходами кЪммутатора 9, а выходы связаны с множительными устройствами 2 и 3. К дое из фазосдвигающих устройств выполнено на ключах 12, основных резисторах 13 и дополнительных резист рах 14, и содержит на выходе преобразователь тока в напряжение 15, Устройство работает следующим образом. На один из входов множительных устройств 2 и 3 поступают выходные напряжения синхронного генератора 1 и, се sinci , и с cosot где cg - коэффициент ЭДС, d - угол поворота ротора синхронного генератора. На другие входы множительных уст ройств через фазочувствительные выпрямители и фазосдвигающие устройства поступают напряжения с датчика положения 4 : УЗ U,sin(o(. .+ Aot-f- Р)) U4 (оС + AoL + р) , где Л - угол рассогласования между датчиком положения и синхр ным генератором, обусловлен ный неточностью выставки ма шин в пространстве; (Ъ - угол сдвига фаз между входным напряжением (выходные н пряжения фазочувствительных выпрямителей) фазосдвигающи устройств и их выходным током i . Выходное напряжение всего устрой ства определяется выражением, . вых -U +U2U4 cos (ДА+(Ъ)|| При ib О крутизна преобразованй устройства меняется пропорционально косинусу угла рассогласования датчи ка положения и синхронного генератора udL. В случае, когда множительные устройства вьшрлнены на резисторах и ключах, наличие угла рассогласования u.ci приводит к увеличению пульсации в выходном напряжении. Для исключения отрицательного влияния угла ЛоС в схеме используетс коммутатор 9 и фазосдвигающие устройства 10 и 11, с помощью которых вводится угол сдвига фаз jb - ДД. том случае, когда угол рассогласоания А.оС 90°, с помощью коммутатоа 9 сигнал датчика положения (с выодов фазочувствительных выпрямитеей) сдвигается на угол (% дсА. + ,90° , помощью фазосдвигающих устройств изменяют угол сдвига фаз до тех пор, ока он полностью не скомпенсирует ространственный угол рассогласования &d. Выходные токи в плечах фазосдвигающих устройств в зависимости от величины угла сдвига фаз ft определяются выражениями 2,41 ft . . ft , -I -man o,5ft+2,41fb 1,207-F -2ft ,2 HICK 0, 5Г+0, Ъсос Подбирая определенную комбинацию ключей фазосдвигающих устройств, устанавливают такие соотношения амплитуд , , которые соответствуют пространственному углу рассогласования лсС и компенсируют его, Формула изобретения 1.Измеритель скорости вращения, содержащий расположенные на одном валу синхронный генератор, связанный с первыми входами множительных устройств, и датчик положения, связанный с фазочувствитальными выпрямителями , отличающийся тем, что, с целью повышения стабильности крутизны и уменьшения пульсации выходного сигнала, он снабжен связанным с фазочувствительными выпрямителями коммутатором и фазосдвигакщими устройствами, входы которых соединены с выходами коммутатора, а выходы связаны с вторыми входами множительных устройств. . 2. Измеритель по п.1, о т л и чающийся тем, что каждое фазосдвигающее устройство выполнено на ключах и снабжено основными резисторами, величины сопротивлений которых распределены по двоичному закону, подключенными к выходу клк)чей дополнительными резисторами, включенными ;между входами ключей и выходами коммутатора, и преобразователем тока в напряжение, вход которого соединен с основными резисторами, а выход - с вторым входом соответствующего множительного устройства. Источники информации, принятые во внимание при-экспертизе 1.Авторское свидетельство СССР 4-32389, кл. С 01 Р 3/46., 1973. 2.Авторское свидетельство СССР № 591768, кл. С 01 Р 3/46, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный реверсивный тахогенератор постоянного тока | 1976 |
|
SU552663A1 |
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| Устройство для тарировки измерителей угловой скорости и ускорения | 1979 |
|
SU871079A1 |
| Устройство для измерения температурных полей | 1980 |
|
SU898266A1 |
| Датчик положения ротора для привода с машиной двойного питания | 1983 |
|
SU1111234A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Устройство для измерения скорости вращения | 1976 |
|
SU591768A1 |
| Множительно-делительное устройство | 1981 |
|
SU995098A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1979 |
|
SU801712A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |