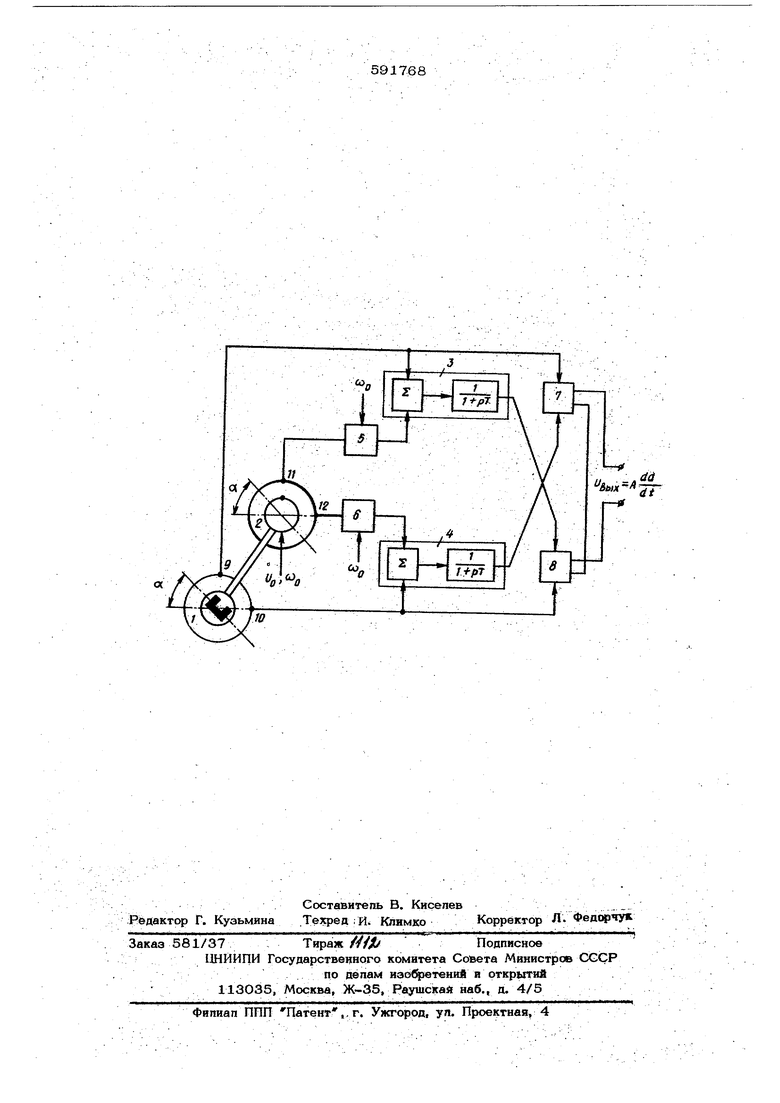
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ тара 1 сое«инен с первым входом блока 3 и с первым вхо{юм множительного устройства 7t ja выход Ю генератора - с первым входа ш блока 4 в множительного ycxpo&f ства 8. Ко вторым входам блоков 3 в 4 через фазочувствитетаьные выпрямите ни 5 и 6 подк точены соогветствуйшие ,ВЬРходы 11 и 12 датчика положения. Выходы блоков 3 и 4 подсоединены ко вторым вхо дам мрожитетвьных устройств соответса-вен- но 8 и 7, связанных первыми вхооами с выходами других фаз генератора. В обвде1л, случае, при числе фаз устройства более дву выходы блоков интегрирования соеДиня1Отся со вторыми входами тех множительных устройств, первые вхощл которых связаны с предыдущими фазами синхронного генератора. Выходы множительных устройств 7 и 8 цепь явля соединены последовательно, и эта ся выходной цепью устройства. Для правильной работы устройства необходимо, чтобы оси роторов, синхронного генератора 1 и датчика положения были сов мещены, как доказано на чертеже. Устройство работает следующим образом На выходах 9 и 10 синхронного генератора наводятся ЭДС, пропорциональные произведению угловой скорости, соответственно, на синус и косинус угпа поворота ротора. Поскольку магнитная ось ротора генератора 1 совмещена с осью ротора датчика 2; на выходах 11 и 12 датчика будут сформированы моду гшрованные сигналы с несушей Частотой ixl и амплитудами, . пропорционал ными соответственно, синусу и косинусу угла поворота ротора, Посце фазочувствйтепьных выпрямителей S и б, в которых опорное напряжение имеет ту же частоту tOp, что и напряжение возбуж дения датчика, получаются напряжения, про порционапьные огибающим модулированных сигналов, Эти напряжения суммируются в блоках 3 и 4 с соот ветствующими быходным напр:яжениями синхронного генератор и подученные суммы интегрируются, .. Для подавления высокочастотных пупьсаций на несущей частоте после фазочувствительных выпрямителей, необходимо установить фильтры. Роль этих фильтров в преднагаемом устройстве выполняют ёпоки 3 и 4, Их постоянная времени определяет ся, в частности, частотой Ыо, Применение даухканапьного.) формирователя сийусоидапь ных функций угла поворота - по углу првон-. рота и по ЭДС синхронного генератора, т.в по производной угла поворота- йозвопяет . пбпностью скомпенсировать {(нераиоцыое . дейстявие фильтра,. ... . Выходное напрякение блока 3 пёремно-г «сйетгся с напряжением с выхода 10 синхрон: ного генератора, а выходное напряжение блока 4-9 напряжением с выхода 9 щнератора,: , Благодаря последовательному соединеник выходов множительных ус.трсйств эти напря нияскладываются..ф данном cjQTsae, для Дву 1 азного устройства необхрс мо встречное соединение. При числе фаз устройства бопей 0вух все, выходы множите ль-нь1х усграй ъ вклюЧааогся последовательно,; Выходное напря}кеш1е пропорционально мгновенному значению: скорости враи1е:Иия ротора синхронного генератора, Безычер цириность формирователя синусоидалыцьос функций угла поворота обеспечивает езьп10рционную ; работу всего устройства В целом |И тем самым повышается его быстродействие по сравнению;, с прототипом. Блоки 3 и 4 Интегрирования суммы двух сигналов могут быть выполнены например, как показано на чертеже, в виде сумматрра и апериодического звена, включенньк последовательно или в виде интегриру1 цёг,о операционнОгР усидателя, с двумя входами. Возможно также использование RG-фильтра с двумя резисторамин общим конденеатрром и 3 Р б .р е т .е н и р м у л а Устройство для измерения скорости вращения, содержащее синхронньй генератор, датчик углового попржения« ротРра, фазоО ствитепьные выпрямители к множительное устройства, выходы котррых соеДий&ны л;оследовательнр, а первые входы связаны с вь ходами, синхронного генератора, от и и ч} а ю щ е е с я тем, «iTo, с целью повышения. быстродействия, в него введешл блоки интег рирования суммы двух сигйалРВ, первые входы роединёяы с выходами синхрррного генератора, вторые входы через аочувствительные вьшрямитепи связаны с выхсь дамв датчика положения рртора, а выходы блоков интегриррвания подкгаочены ко pbiM входам, множительных устройств, Нсточиики информации, принять1в ао BHJ .vtaHHe при экспертизе:. 1,Автфское йвндётельстЬо СССР , 187878, кл, 01 Р ;3/46, 1966. 2.Авторское свидетещьство СССР ) 1865Б6,; кп И OJ, Р 3/46, 1В66.
77
а
/у . im- J T НтТрт
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| Измеритель скорости вращения | 1979 |
|
SU800882A1 |
| Бесконтактный реверсивный тахогенератор постоянного тока | 1976 |
|
SU552663A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1985 |
|
SU1319225A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Электропривод | 1988 |
|
SU1529394A1 |