Изобретение относится к автоматике в частности к системам передачи сигна лов с использованием электромашинных устройств. Известны двухканальные системы передачи углового или линейного перемещения, содержащие двухполюсный и многополюсный датчики грубого и точного каналов со статорами, подвижными элементами, обмотками возбуждения и обмотками синхронизации, двухполюсный и многополюсный приемники грубого и точ ного каналов со статорами, подвижными элементами, обмотками синхронизации и выходными обмотками, источник питания, синхронизирующее устройство коммутатор сигналов управления и исполнительный двигатель, причем обмот ки возбуждения обоих датчиков подсоединены к источнику питания, а их обмотки синхронизации соединены поканально по схеме трансформаторной дистационной передачи с обмотками си ронизации обоих приемников,вход синхронизирующего устройства соединен с выходной обмоткой ппиемника грубого канала, один из входов коммутатора сигналов управления соединен с выходом синхронизирую1пего устройства, а два других - С вы- . ходными обмотками обоих приемников, подвижные элементы датчиков так же, как и подвижные элементы приемников, соединены между собой механически, исполнительный двигатель, электрически связанный с выходом коммутатора, механически соединен с подвижными элементами приемников грубого и точного каналов l и 2. Недостатками этих систем являются большие габариты, вес и стоимость, что объясняется наличием двух датчиков и двух приемников, Известны двухканальные следящие системы передачи перемещения, содержащие последовательно соединенные блоки датчиков и приемников грубого и точного каналов, а также блок синхронизации, вход которого соединен с первым выходом блока приемников, грубого и точного каналов, коммутатор сигналов управления, первый вход которого соединен с выходом блока синхpoнизaL,ии, исполнительный двигатель, вход которого электрически связан с выходом коммутатора, а выход механически соединен с соответствующим входом блока приемников, и первый источник напряжения переменного тока Jsj
Однако у таких систем между обмотми различных каналов возникают паразитные потокосцепления -создающие взаимное влияние и помехи между каналами , что приводит к погрешности в передаче углового или линейного перемещения.
Цель изобретения - повышение точности следящей системы.
Цель достигается тем, что в следящую систему введены два фильтра и второй источник напряжения переменно тока, отличающийся от первого источника частотой, причем выходы первого и второго источников напряжения переменного тока соединены с соответствующими входами блока датчиков грубого и точного каналов, а выходы блока приемников грубого и точного каналов через фильтры соединены со вторым и третьим входами коммутатора
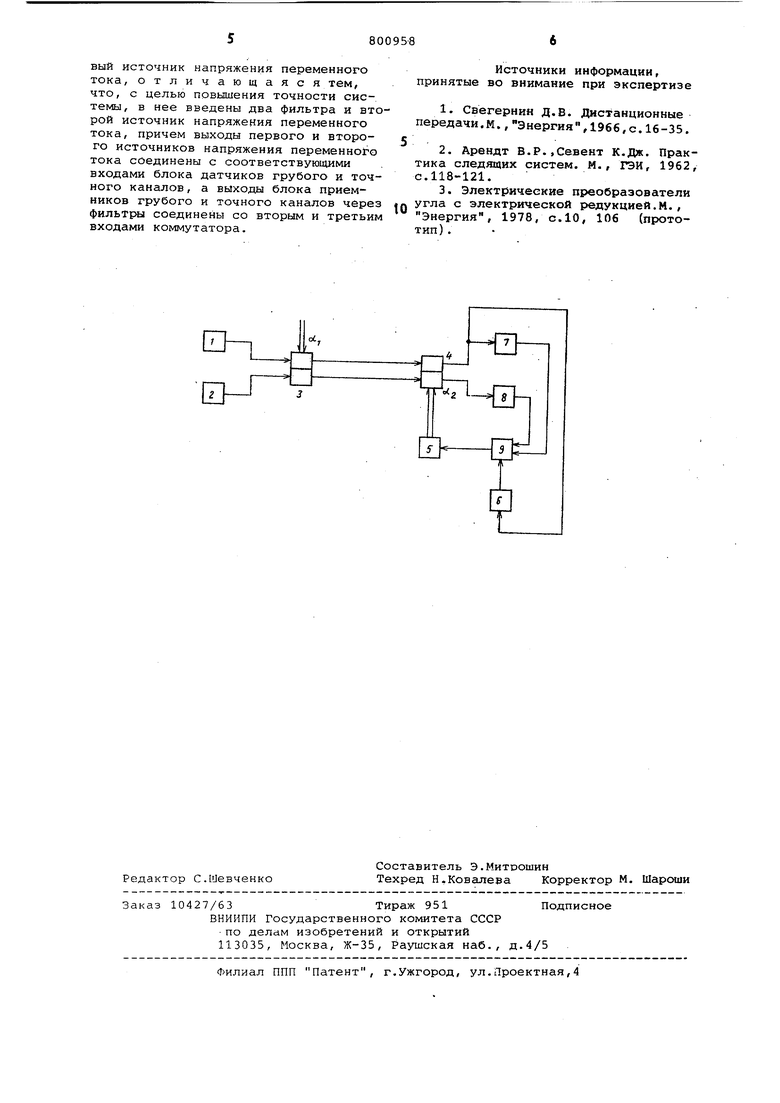
На чертеже представлена блок-схема следящей системы.
Система включает источники 1 и 2 напряжения переменного тока, блок датчиков 3 грубого и точного -каналов, .блок 4 приемников грубого и точного каналов, исполнительный двигатель 5, лок 6 синхронизации, фильтры 7 и 8, коммутатор 9. ,
Устройство работает следующим Образом.
Источники 1 и 2 напряжения переменного тока двух различных частот подают питание соответственно на обмотку возбуждения датчиков 3 грубого и точного канала. Обмотки синхронизации блока датчиков 3 грубого в и точного каналов соединены по схеме трансформаторной дистационной передачи соответственно с обмотками синхронизации блока 4 приемников грубого и точного каналов. Выходы блока 4 приемников грубого и точного каналов включены соответственно на входы фильтров 7 и 8, кроме того, первый выход (грубый канал) включен на вхо блока б синхронизации. Выходы фильтлров 7 и 8 включены на два входа коммутора 9 сигналов управления.
Выход коммутатора включен на обмотку управления исполнительного двигателя 5. Блок б синхронизации имеет выход, который включен на вход коммутора 9.
В блоках датчиков 3 и приемников грубого и точного каналов отклонения реальных конструкций блоков от идеалных моделей, в выходных обмотках точного канала наводятся ЭДС,создаваемые потоками возбуждения обмоток грубого канала. Так же проявляется влияние точного канала на грубый.
Фильтр 8 настроен на пропускание сигнала частоты источника 2 напряжения переменного тока и на подавление наведенной помехи частоты источника 1 напряжения переменного тока. Аналогично фильтр 7 настроен на пропускание сигнала частоты источника 1 наряжения переменного тока и на подавление наведенной помехи частоты источника 2 напряжения переменного ток Однако к фильтру 7 в грубом канале могут предъявляться значительно меньшие требования по степени подавления помех частоты источника 2 напряжения переменного тока, так как погрешност следящей системы определяется помехами в точном канале.
При повороте ( или линейном перемещении ) подвижного элемента блока датчиков 3 грубого и точного каналов на выходах блока 4 приемников грубого и точного каналов появляются сигнлы рассогласования. В первый момент при большом сигнале, поступающем на вход блока 6 синхронизации, коммутатор 9 по сигналу блока б синхронизации подключает к входу исполнительного двигателя 5 сигнал управления с выхода фильтра 7. Исполнительный двигатель 5 поворачивает (или перемещает линейно) подвижный элемент блока 4 приемников грубого и точного каналов до тех пор, пока сигнал на его первом выходе не уменьшится до величины, при которой блок 6 синхронизации не подает команду коммутатору 9 подключить на обмотку исполнительного двигателя 5 выход фильтра 8 и отключить при этом выход фильтра 7. Исполнительный делитель 5 поворачивает (или перемещает линейно) подвижный элемент блока 4 приемников точного и грубого каналов, при котором сигнал управления точного канала станет равным нулю. При этом погрешность следящей системы будет тем меньше,чем в большей степени будет осуществлено Фильтром 8 подавление помехи грубого канала в сигнале точного канала.
Таким образом, за счет подавления влияния помех только грубого канала на работу точного канала удается повысить точность работы следящей системы.
Формула изобретения
Следящая двухканальная система, содержащая последовательно соединенные блоки датчиков и приемников грубого и точного каналов, а также блок синхронизации, вход которого соединен с первым выходом блока приемников, грубого и точного каналов, коммутатор, первый вход которого соединен с выходом блока синхронизации, исполнительный двигатель, вход которого электрически соединен с выходом коммутора, а выход механически - с соответствующим входом блока приемников грубого и точного каналов, и первый источник напряжения переменного тока, отличающаяс я тем, что, с целью повьачения точности системы, в нее введены два фильтра и второй источник напряжения переменного тока, причем выходы первого и второго источников напряжения переменного тока соединены с соответствующими входами блока датчиков грубого и точного каналов, а выходы блока приемников грубого и точного каналов через фильтр соединены со вторым и третьим входами коммутатора.
Источники информации, принятые во внимание при экспертизе
1.Свегерния Д.В. Дистанционные передачи.м.,Энергия,1966,с.16-35.
2.Арендт В.Р.,Севент К.Дж. Практика следящих систем. М., ГЭИ, 1962, с.118-121.
3.Электрические преобразователи угла с электрической редукцией.м., Энергия, 1978, 0.10, 106 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Следящая система | 1978 |
|
SU744435A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Следящая система | 1973 |
|
SU452804A1 |
| Следящая система | 1979 |
|
SU903803A2 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| Следящая система | 1982 |
|
SU1107105A1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2150775C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ПРЕОБРАЗОВАНИЯ УГЛА | 1992 |
|
RU2049371C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2360809C1 |
