со С
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система с разделенной нагрузкой | 1975 |
|
SU553590A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Двухканальная следящая система с разделенной нагрузкой | 1987 |
|
SU1425597A1 |
| Следящая система | 1986 |
|
SU1401436A2 |
| Следящая система | 1981 |
|
SU993202A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Электрогидравлический следящий привод робота | 1988 |
|
SU1557371A1 |
Изобретение относится к системам автоматического управления и может быть использовано при построении прецизионных следя ьцих систем с ш ироким диа пазр н о м ре- гулирования скорости в различных областях техники. С целью повышения точности в системе используются оптимальные настройки регуляторов каналов, позволяющие минимизировать дисперсию ошибки трех- канальной следящей системы при случайном полезном сигнале, измеренном со случайной помехой, и действии случайных возмущений при учете ограничений на управление и переменные состояния в исполнительных двигателях каналов управления. 2,ил.
Изобретение относится к системам ав тематического управления и может быть использовано для построения прецизионных ел едя щи х с иетем с широким д иап азоном ре- гулирования скорости в различных областях техники.;;::
Известна следящая система, жащйя управляющий канал состоящий из последовательно соединенных чувствительного элемента, первого усилителя, перг вого исполнительного двигателя и первого редуктора, и опорный канал, состоящий из последовательно соединенных второго ycii- лителя, второго исполнительного двигателя и второго редуктора, причем выходы рёдук торов соединены через дифференциал и сиг ловой редуктор с объектом управления, соединенным с чувствительным элементом. Система содержит первый и второй сумматоры, первый и второй источники опорного сигнала и измеритель скорости, при этом первый вход первого сумматора соединен с
выходом чувствительного элемента, второй вход - с выходом первого источника опорного сигнала, а выход - с входом первого усилителя, вход измерителя скорости соединен с выходом первого исполнительного двигателя, а выход - с первым входом второго сумматора, второй вход которого соединен с выходом второго источника опорного сигнала, а выход - с входом второго усилителя опорного канала.
Недостатком известной системы является относительно низкая точность обработки быстроизменяющегося задающегося воздействия, приложенного к объекту управления.
Наиболее близкой по технической сущности и достигаемому результату к изобретению является двухканальная следящая система с раздельной нагрузкой, содержащая последовательно соединенный первый Чувствительный элемент, привод грубого канала, редуктор и первую платформу, с котоО
N VI ю
рой соединен первый чувствительный элемент и на которой установлен моментный. двигатель, кинематически связанный с второй платформой, на которой установлен датчик абсолютной угловой скорости, выход которого через первый корректирующий фильтр соединен с первым входом сумматора, второй вход которого через второй кор- ректирующий фильтр соединен с выходом второго чувствительного элемента, кинематически соединенного с второй платформой, вход моментного двигателя через усилитель связан с выходом сумматора, кроме того, система содержит последовательно соединенные датчик угла поворота ротора моментного двигателя относительно статора, масштабирующий блок и фильтр высоких частот, выход которого соединен с .дополнительным входом сумматора, а моментный двигатель соединен с датчиком угла поворота ротора моментного двигателя относительно статора.
Недостатки известной системы - сравнительно низкая точность системы при обработке случайных входных воздействий, измеряемых со случайными помехами, и действий случайных возмущающих воздействий. Имеющиеся в приводах регуляторы обычно подчиненного регулирования и интеграторы n-го порядка не позволяют эффективно снижать дисперсию ошибки следящей системы.
Цель изобретения - повышение точности системы в режиме слежения за случайными входными сигналами при измерении их со случайными помехами и воз-действии . случайных возмущающих воздействий.
Указанная цель достигается тем, что в трехканальную следящую систему, содержащую первый и второй приводы, соединенные выходами через дифференциал с первой платформой, третий привод, исполнительный двигатель которого установлен на первой платформе и кинематически связан с второй платформой, первый и второй измерители ошибки, первые входы которых являются первым и вторым вводами системы, вторые входы кинематически связаны с соответствующей платформой, первый и второй усилители сигнала ошибки, соединенные входами соответствующих измерителей ошибки, причем первый и второй приводы содержат последовательно сое/Синенные источник опорного напряжения, сумматор, усилитель мощности, исполнительный двигатель и редуктор, выход которого является выходом привода, а также датчик скорости, соединенный входом с выходом исполнительного двигателя, и датчик -ока. пход которого соединен с выходом усилителя мощности, третий привод содержит последовательно соединенные сумматор, усилитель мощности, исполнительный двигатель и датчик скорости, а также датчик
положения, соединенный входом с выходом исполнительного двигателя, и датчик тока, вход которого соединен с выходом усилителя мощности, введены три фильтра, по два масштабирующих усилителя в первый и второй приводы, три масштабирующих усилителя в третий привод, причем выходы первого и второго усилителей сигнала ошибки соединены через первый и второй фильтры с вторыми входами сумматорами
соответственно первого и третьего привода, выход датчика скорости первого привода соединен через третий фильтр с вторым входом сумматора второго привода, причем в каждом приводе выход датчика тока соответствующего привода через первый масштабирующий усилитель соединен с третьим входом сумматора, выход датчика скорости соответствующего привода через второй масштабирующий усилитель с четвертым
входом сумматора, а выход датчика положения через третий масштабирующий усилитель -с первым входом сумматора третьего привода.
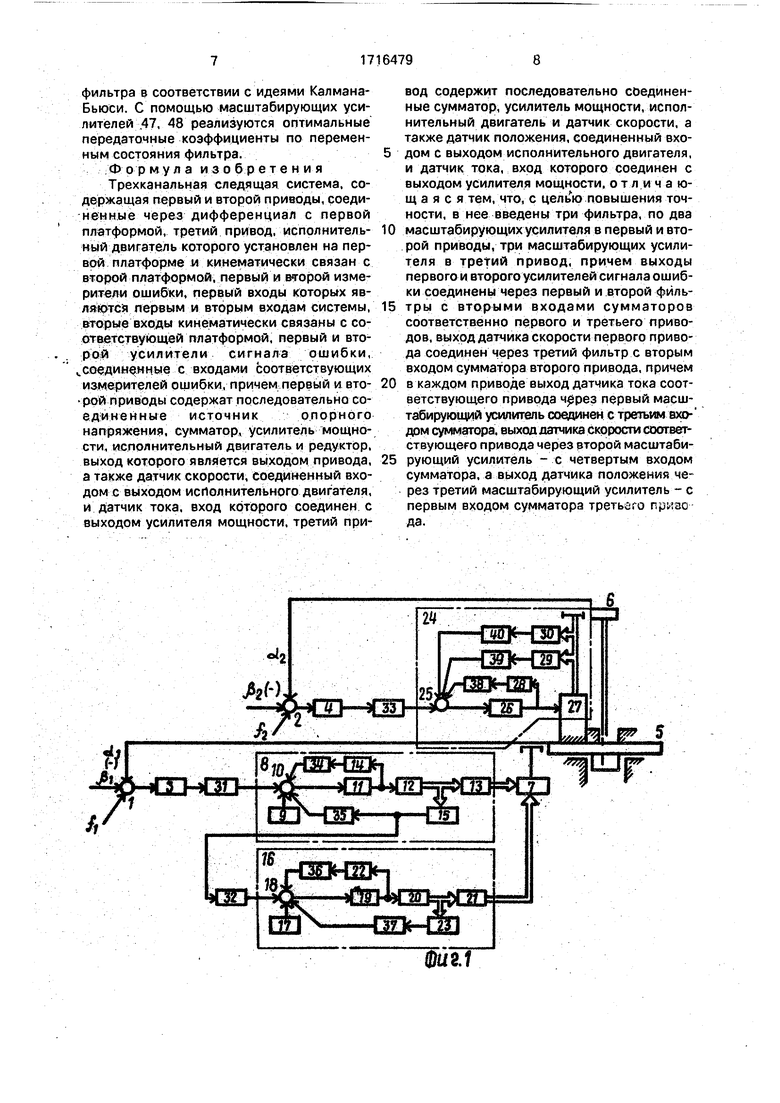
На фиг.1 показана структурная схема
трехканальной следящей системы.
Трехканальная следящая система содержит первый 1 и второй 2 измерители ошибки, первый 3 и второй 4 усилители сигналов ошибки, первую 5 и вторую 6 платформы, дифференциал 7, первый привод 8, включающий-источник 9 опорного напряжения, сумматор 10, усилитель 11 мощности, исполнительный двигатель 12, редуктор 13, датчик 14 тока и датчик 13 скорости, привод
16, включающий источник 17 опорного напряжения, сумматор 18, усилитель 19 мощности, исполнительный двигатель 20, редуктор 21, датчик 22 тока и датчик 23 скорости, третий привод 24, включающий сумматор 25, усилитель 26 мощности, исполнительный двигатель 27, датчик 28 тока, датчик 29 скорости и датчик 30 положения, первый 31, второй 32, третий 33 фильтры, первый 34 и второй 35 масштабирующие усилители первого привода, первый 36 и второй 37 масштабирующие усилители второго привода, первый 38, второй 39 и третий 40 масштабирующие усилители третьего привода.
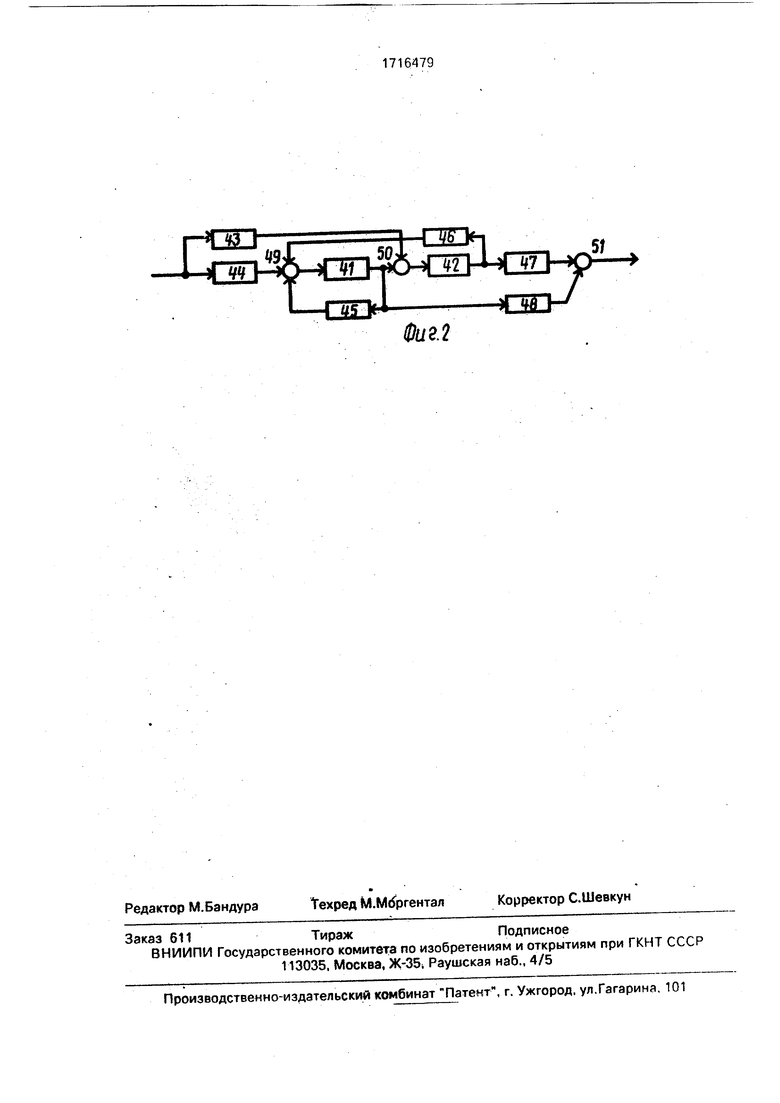
На фиг.2 показана структурная схема фильтров.
Схема содержит интеграторы 41, 42, масштабирующие усилители 43 - 48, сумматоры 49-51.
Трехканальная следящая система работает следующим образом.
При равенстве входного и выходного «1 воздействий грубого первого привода 8 исполнительный двигатель 12 и исполни- тельный двигатель 20 опорного второго привода 16 вращаются с одинаковыми по величине, но противоположными по знаку скоростями за счет опорных сигналов, подаваемых на сумматоры 10 и 18 источнике 9 и 17 опорных напряжений. Выходной вал дифференциала 7 неподвижен, а следовательно, неподвижна и первая платформа 5. При появлении сигнала ошибки между задающим .и входным а воздействием ис- полнительный двигатель 12 первого привода 8 увеличивает (или уменьшает} скорость относительно опорного значения. За счет сигнала с датчика 15 скорости враще- ния исполнительного двигателя 12 изменя- ется скорость вращения и исполнительного двигателя 20 второго привода 16, причем в обратном направлении по отношению к скорости вращения основного исполнительного двигателя 12 грубого первого привода 8, за счет чего происходит изменение положения первой платформы 5 в сторону уменьшения рассогласования между входным и выходным а воздействием грубого канала. Это позволяет повысить плавность и точность работы по скорости (особенно при малых скоростях) и, следовательно повысить точность работы по углу поворота первой платформы.
Перемещение второй платформы 6 про- исходит по сигналу рассогласования между входным fa и выходным «2 воздействием второй платформы. Так как первая платфор: ма 5 вращается вместе с второй платформой 6, а выходная величина аг равна сумме перемещенмя первой платформы относительно неподвижного основания и второй . платформы относительно первой за счет работы исполнительного двигателя 27, третьего привода 24, то третий привод 24 отрабатывает ошибку первой платформы 5 и, следовательно, осуществляет точное сле- жение за воздействием fii.
При пользовании двухканальнойсистемы управления первой платформой 5 существенно расширяется диапазон регулирования скоростей, повышается плавность регулирования, а также увеличивается быстродействие отработки углов перемещения первой платформы 5 по меньшей мере в два раза.
Так как ошибка отработки задающего воздействия /3i с помощью первой платформы за счет введения опорного второго
5 0 5 0
5 0
0
5
канала существенно уменьшается, то это позволяет уменьшить зону линейности дис- криминаторной характеристики второго измерителя 2 ошибки, точного третьего привода 24, так как эквивалентный спектр его входного сигнала определяется ошибкой отработки задающего воздействия с помощью первой платформы 5. Это позволяет повысить коэффициент усиления точного третьего привода 24, а следовательно, дополнительно уменьшить ошибку слежения за основным управляющим воздействием.
Некоррелированные между собой случайные воздействия /#i(t)$2(t) и помехи измерения fi (t), f2 (задаются от источников типа белого шума единичной интенсивностью с. помощью формирующих фильтров. Оптимальный канал;управления представляет собой последовательное соединение оптимального фильтра, с помощью которого восстанавливается с минимальной дисперсией эквивалентное задающее воздействие канала и собственно регулятор системы. Из теории оптимального управления известно, что дисперсию ошибки управления минимизирует линейный регулятор, реализующий обратные связи по всем переменным состояния системы.;:
Первый привод 8 содержит первый фильтр 31 задающего воздействия. Оптимальный регулятор первого привода 8 представляет обратные связи по переменным состояния первого канала, реализованным с помощью масштабных усилителей 34-35.
Второй привод 16 содержит второй фильтр 32 эквивалентного задающего воздействия. Оптимальный регулятор второго привода 16 реализован с помощью масштабных усилителей 36, 37 в форме обратных связей по переменным состояния второго канала.
Третий привод 24 содержит третий фильтр 33 эквивалентного задающего воздействия. Оптимальный регулятор третьего канала реализован с помощью масштабных усилителей 38 - 40 в форме обратных связей по переменным состояния третьего канала.
Все три фильтра 31, 32 и 33 имеют одинаковую структурную схему, показанную на фиг.2, и реализованы с помощью интеграторов 41,42 и масштабирующих усилителей 43 -48, При этом с помощью масштабирующих усилителей 45, 46 осуществляется настройка фильтра в-соответствии с моделью формирующего фильтра эквивалентного задающего воздействия от источника случайных сигналов типа белого шума. С помощью масштабирующих усилителей 43, 44 осуществляется оптимальная коррекция
фильтра в соответствии с идеями Калмана- Бъюси. С помощью масштабирующих усилителей 47, 48 реализуются оптимальные передаточные коэффициенты по переменным состояния фильтра. : Ф о р мула изо б р е т е н и я Трехканальная следящая система, содержащая первый и второй приводы, соединенные через дифференциал с первой платформой, третий привод, исполнитель- ный двигатель которого установлен на первой платформе и кинематически связан с второй платформой, первый и второй измерители ошибки, первый входы которых яв- первым и вторым входам системы, вторые входы кинематически связаны с соответствующей платформой, первый и вто- р:ОЖ усилители сигнала ошибки,
..соединенные с входами соответствующих измерителей ошибки, причем первый и вто-
рой приводы содержат последовательно со- единенные источникопорного
напряжения, сумматор, усилитель мощности, исполнительный двигатель и редуктор, выход которого является выходом привода, а также датчик скорости, соединенный входом с выходом исполнительного двигателя, и датчик тока, вход которого соединен с выходом усилителя мощности, третий при
JW-)
- S-rfTn--on
вод содержит последовательно соединенные сумматор, усилитель мощности, исполнительный двигатель и датчик скорости, а также датчик положения, соединенный входом с выходом исполнительного двигателя, и датчик тока, вход которого соединен с выходом усилителя мощности, о т л.и ч а ю- щ а я с я тем, что, с целью повышения точности, в нее введены три фильтра, по два масштабирующих усилителя в первый и второй приводы, три масштабирующих усилителя в третий привод, причем выходы первого и второго усилителей сигнала ошибки соединены через первый и второй фильтры с вторыми входами сумматоров соответственно первого и третьего приводов, выход датчика скорости первого привода соединен через третий фильтр с вторым входом сумматора второго привода, причем в каждом приводе выход датчика тока соответствующего привода через первый масштабирующий усилитель соединен с третьим вхо- дом сумматора; выход датчика скорости соответствующего привода через второй масштабирующий усилитель - с четвертым входом сумматора, а выход датчика положения через третий масштабирующий усилитель - с первым входом сумматора третьего призе да.
LLJp
ftjtf
Редактор М. Банду pa
Техред М.Мбргентал
Заказ 611ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35 Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород. ул.Гагарина, 101
51
ft/г г
Корректор С.Шевкун
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Двухканальная следящая система с разделенной нагрузкой | 1975 |
|
SU553590A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
