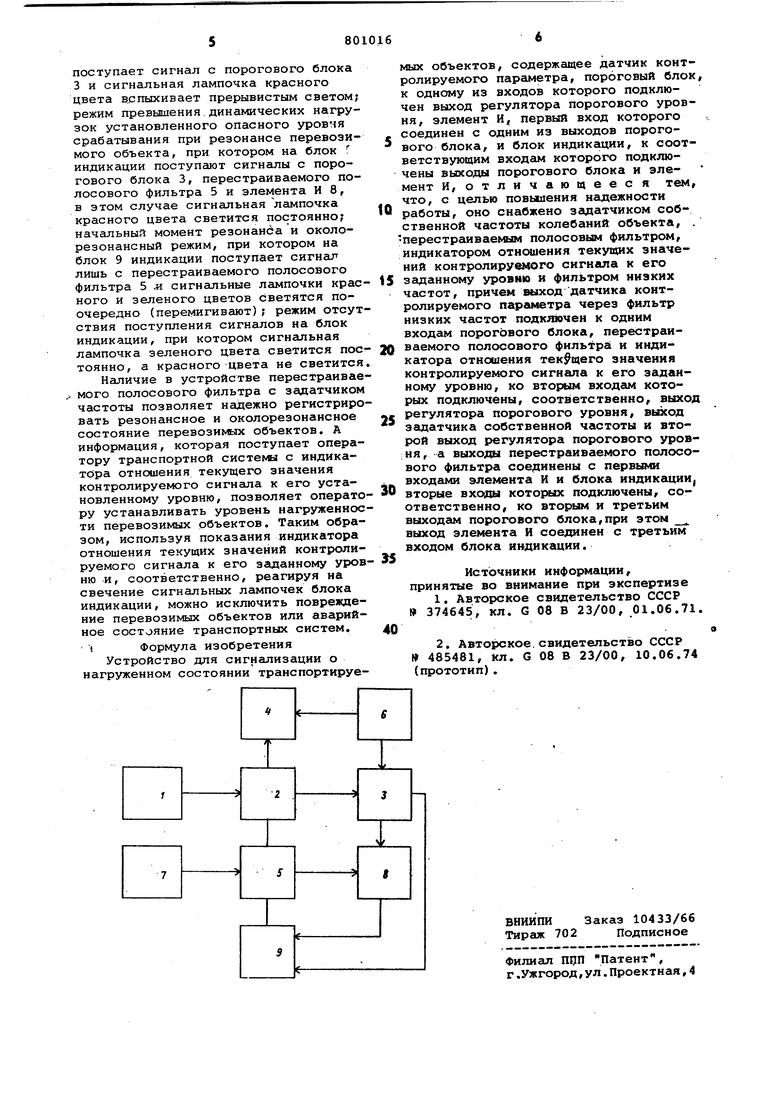
Изобретение относится к автоматической сигнализации и может быть использовано на автотранспортных средствс1х в качестве указателя нагруженного состояния транспортируемых объектов, преимущественно строи тельных конструкций, для обеспечения их перевозок без повреждения. Известно устройство для сигнгшизации о состоянии контролируемого объекта, имеющее своей целью защиту от развития аварийного состояния машин и механизмов. Это устройство содержит преобразователь механических колебаний в электрический сигна коммутатор, преобразователь, блок сравнения электрического сигнсша и опорного напряжения, которое равно значению сигнала от электрического преобразователя при аварийном уровн вибрации контролируемого объекта, источник опорного напряжения, блок задержки, блок контроля, исполнител ный блок и блок блокировки 1. Недостатком устройства применительно к транспортируемым объектам является то, что оно не позволяет различать характера внешних возмущений на объект, в частности, импул ного (однократного) возмущения от наиболее опасного для транспортируемого объекта периодического возмущения с частотой, близкой к собственной частоте колебаний объектов (конструкций) в транспортном положении. Такое устройство работает однозначно при повышении текущими значениями динамических нагрузок их опасного уровня как при относительно устаиовившихся резонансах транспортируемых объектов, так и при их отсутствии. Наиболее близким по технической сущности к предпагаемсжу является устройство для сигнализации об уровне нагрузки в автотранспортных системах, содержащее вибродатчики входного и контролируемого сигналов, подключенные к блоку сравнения частот, выход которого соединен с одним из входов элемента И, пороговый блок, к одному из входов которого подключен второй вход вибродатчика контролируемого сигнала и выход регулятора уровня срабатывания, при этом соответствующие выходы пс огового блока подк.пючены ко второму входу элемента И, к счетчику и к одному из входов блока индикации, ко второму входу которого присоединен выход элемента И 12. Недостатком этого устройства является то, что оно не дает надежной информации о совпадении частот входного и выходного сигналов (резонансе так как эти сигналы имеют сложный характер, обусловленный интерференцией различного рода колебаний. Кроме того, для обеспечения безопасной перевозки чувствительных к транс портным воздействиям объектов необхо дима предупреждающая информация об околорезонансном режиме перевозимого объекта, т.е. о близости преобладающей частоты внешних воздействий (входного сигнсша) к собственной частоте колебаний объекта в транспор тном положении, и о текущем нагруженном состоянии транспортируемогсГ объекта. А такой информации известное устройство не дает. Цель изобретения - повышение надежности устройства. Поставленная цель достигается тем что устройство снабжено задатчиком собственной частоты колебаний объекта, перестраиваегалм полосовым фильтром, индикатором отношения текущих значений контролируемого сигнала к его заданному уровню и фильтром низких частот, причем выход датчика контролируемого объекта через фильтр низких частот подключен к одним входам порогового блока, перестраиваемого полосового фильтра и индикатора отношения текущих значений контролируемого сигнала к его заданному уровню, ко BTOfftJM входам которых подключены, соответственно, выход регулятора порогового уровня,выход задатчика собственной частоты колебаний объекта и второй выход регулятора порогового уровня, а выходы перестраиваемого полосового фильтра соединены с первыми входами элемента И и блока индикации, вторые входы которых соединены, соответственно, со вторым и третьим выходами порогового блока, при этом выход элемента И подключен к третьему входу блока индикгщии. На чертеже представлена функциональная схема устройства. Устройство содержит датчик 1 конт ролируемого параметра, фильтр 2 низких частот, пороговый блок 3, индиKJjiTop 4 отношения текущего значения контролируемого сигнала к заданному его уровню. Перестраиваемый полосовой фильтр 5, регулятор б порогового уровня, задатчик 7 собственной частоты колебаний объекта, элемент И 8 и блок 9 индикации. При чем выход датчика 1 контролируемого параметра через фильтр 2 низких час тот подключен к одним входам порого вого блока 3, индикатора 4 отношений текущего значения нагрузок к заданному уровню и перестраиваемого филь ра 5. Второй вход перестраиваемого полосового фильтра 5 соединен с задатчиком 7. Второй вход порогового блока 3 подключен к одному из выходов регулятора б порогового уровня, второй выход которого соединен со вторым входом индикатора 4. Соответствующие выходы перестраиваемого полосового фильтра 5 подключены к одному из входовэлемента И 8, второй вход которого соединен с одним из выходов порогового устройства 3, и к одному из входов блока 9 индикации, второй и третий входы которого подключены ко второму выходу порогового блока 3 и к выходу элемента И 8. Датчик 1 контролируемого параметра устанавливается в зоне опирания перевозимого объекта на транспортном средстве и воспринимает инерционные нагрузки, действующие на перевозимый объект. Блок 9 индикации имеет сигнальные лампочки зеленого и красного цвета, которые так же, как индикатор отношения текущего значения контролируемого сигнала к его заданному уровню иручки управления регулятором порогового уровня и задатчиком частоты, монтируются на приборной панели транспортного средства. Устройство работает следующим образом. При движении транспортного средства внешние возмущения (преимущественно обусловленные неровностями пути) воздействуют на перевозиивлй объект. При этом датчик 1 регистрирует инерционные нагрузки и его сигнгшы через фильтр 2 низких частот поступают на пороговый блок 3, на индикатор 4 отношения текущего значения контро.лируемого сигнала к его заданному уровню и на Перестраиваег ый полосовой фильтр 5. В случае превышения амплитуды сигналов с датчика 1 уровня срабатывания, установленного регулятором б, сигнал с порогового блока 3 поступает на вторые входы элемента. И 8 и блока 9 индикации. Одновременно сигнал с датчика 1 поступает на перестраиваемый фильтр 5. Когда частота сигналов, поступающих с датчика 1, .находится в области частот, установленных задатчиком 7, тогда с выхода перестраиваемого полосового фильтра 5 сигналы поступают на первые входы элемента И к блока 9 индикации. При отсутствии сигнала с порогового блока 3 (амплитуда сигнала с датчика 1 меньше установленного регулятором б уровня) на блок 9 индикации может поступать сигналс перестраиваемого полосового фильтра 5 (околорезонансный режим). Блок 9 индикации устройства работает в следующих основных режимах: режим превышения динамических нагрузок установленного опасного уровня срабатывания при отсутствии резонанса, при котором на блок 9 индикации

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТ УТЕЧЕК В НАПОРНЫХ ТРУБОПРОВОДАХ | 1992 |
|
RU2053436C1 |
| Устройство для ультразвукового контроля параметров неоднородных сред | 1984 |
|
SU1221557A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Устройство для учета веса груза,перевезенного в кузове автомобиля | 1981 |
|
SU963024A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для измерения износа ре-жущЕгО иНСТРуМЕНТА | 1978 |
|
SU829352A2 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА | 1995 |
|
RU2085997C1 |
| Способ теплоснабжения тепличного комбината и система для его осуществления | 1989 |
|
SU1687115A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ АВТОКОЛЕБАНИЙ РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ | 2005 |
|
RU2308693C2 |
