I
Изобретение относится к лесозаготовительной технике, в частности к технологическому оборудованию машин для сбора и бесчокерной трелевки деревьев.
Известен гидроманипулятор лесозаготовительной машины, содержаший многозвенную поворотную стрелу с шарнирно связанным с концом ее последнего звена клещевым захватом и гидроцилиндры привода звеньев стрелы 1 .
Недостатком известного гидроманипулятора является сложность управления гидроцилиндрами привода стрелы и особенно управления захватом, так как на каждый гидроцилиндр необходим отдельный золотник и рукоятка управления. Захват, жестко закрепленный на последнем звене стрелы, ограничивает возможности гидроманипулятора.
Цель изобретения - расширение эксплуатационных возможностей гидроманипулятора.
Поставленная цель достигается тем, что между клещевым захватом и последним звеном стрелы установлен гидроцилиндр изменения положения захвата, при этом его поршневая полость сообщена со щтоковой
полостью гидроцилиндра привода последнего звена, а поршневая полость последнего гидроцилиндра сообщена со щтоковой полостью гидроцилиндра изменения положения захвата.
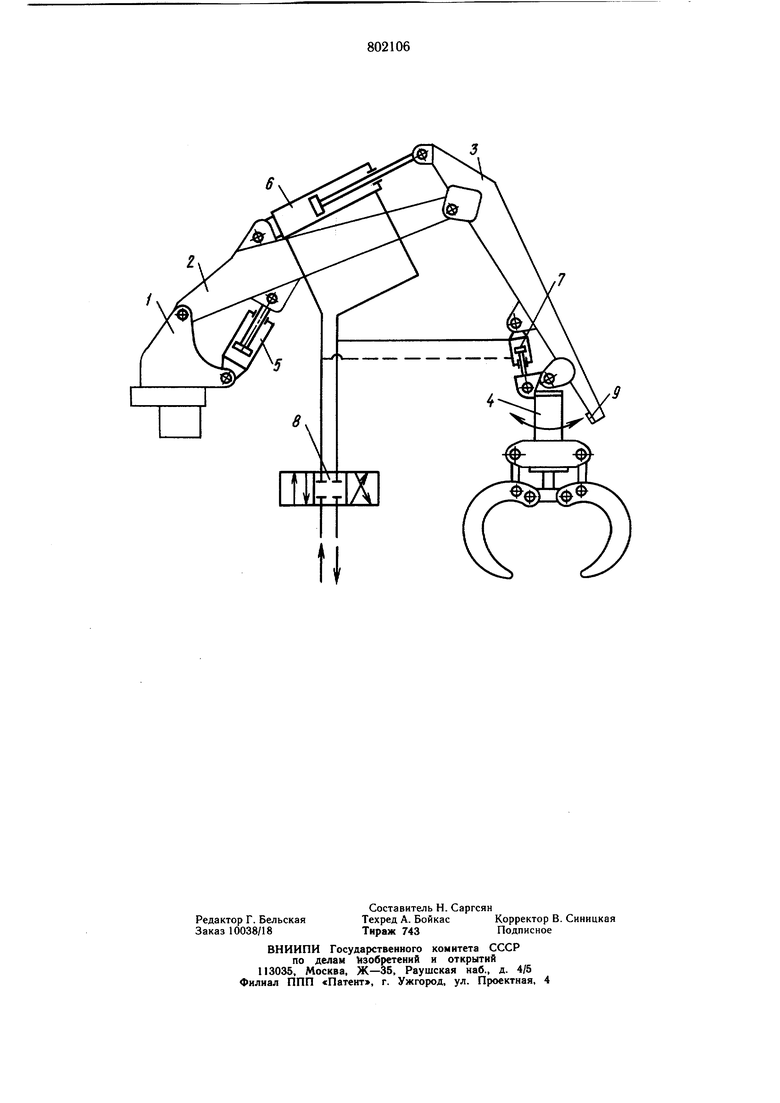
На чертеже изображен предлагаемый гидроманипулятор.
Гидроманипулятор лесозаготовительной машины содержит установленную на колонне 1 поворотную стрелу, состоящую из щарнирно сочлененных звеньев 2 и 3. На последнем звене 3 стрелы шарнирно установлен клещевой захват 4. Звенья 2 и 3 стрелы приводятся в действие гидроцилиндрами 5 и 6. В плоскости стрелы, между последним звеном 3 и захватом 4, установлен гидроцилиндр 7 изменения положения захвата. Каждый гидроцилиндр 5 и 6 привода звеньев стрелы управляется от отдельного золотника. В частности, гидроцилиндр 6 привода последнего звена 3 стрелы подключен к золотнику 8. Штоковая полость гидроцилиндра 6, обеспечивающая увеличение вылета стрелы, соединена с поршневой полостью гидроцилиндра 7, осуществляющей отклонение захвата 4 в сторону увеличения вылета стрелы. Соответственно поршневая полость
гидроцилиндра 6, обеспечивающая уменьшение вылета стрелы, соединена со штоковой полостью гидроцилиндра 7, осуществляющей отклонение захвата 4 в сторону уменьшения вылета. Отклонение захвата ограничено упором 9, выполненным на конце последнего звена 3 стрелы.
Гидроманипулятор работает следующим образом.
Для захвата поваленного дерева оператор вручную или при помощи моделирующего рычага (на чертеже не показан), связанного электрогидравлической схемой с элементами гидроманипулятора, включает те или иные золотники. При этом рабочая жидкость поступает в гидроцилиндры 5 и 6 привода звеньев стрелы, тем самым придавая им заданное положение. В частности, при включении золотника 8, например, в левую крайнюю (по чертежу) позицию рабочая жидкость поступает в штоковую полость гидроцилиндра 6 и одновременно в поршневую полость гидроцилиндра 7. Происходит увеличение вылета стрелы и отклонение захвата 4 в направлении увеличения вылета. Отклонение захвата будет происходить до тех пор, пока включен золотник 8 или пока захват не соприкоснется с упором 9. Такое взаимное расположение стрелы и захвата обеспечивает четкое наведение его на дерево, лежащее дальше точки подвески захвата. При необходимости захватить близко лежащее дерево золотник 8 переключается в правую крайнюю позицию. Теперь рабочая жидкость поступает в поршневую полость гидроцилиндра бив штоковую полость гидроцилиндра 7. Происходит уменьшение вылета стрелы и отклонение захвата 4 в направлении уменьшения вылета. При. захватывании и подъеме дерева на захват действует сила тяжести дерева, стремящееся придать захвату вертикальное положение. При этом в поршневой или штоковой полости гидроцилиндра 7 создается избыточное давление, которое передается по трубопроводам соответственно в штоковую или поршневую полости гидроцилиндра 6. Это вызывает перемещение последнего звена 3 стрелы, и тем самым происходит компенсация перегрузок. Благодаря тому, что объем полостей гидроцилиндра 7 меньше объема соответствующих полостей гидроцилиндра 6, перемещение звена 3 будет незначительным. Дерево переносится гидроманипулятором и укладывается в приемно-зажимное устройство лесозаготовительной машины. Захват разжимается, и гидроманипулятор готов для выполнения следуюшего цикла операций.
Формула изобретения
Гидроманипулятор лесозаготовительной машины, содержаший многозвенную поворотную стрелу с шарнирно связанным с концом ее последнего звена клещевым захватом и гидроцилиндры привода звеньев стрелы, отличающийся тем, что, с целью расширения эксплуатационных возможностей, между клещевым захватом и последним звеном стрелы установлен гидроцилиндр изменения положения захвата, при этом его поршневая полость сообщена со штоковой полостью гидроцилиндра привода последнего звена, а поршневая полость последнего гидроцилиндра сообщена со щтоковой полостью гидроцилиндра изменения положения захвата.
Источники информации, принятые во внимание при экспертизе 1. Патент Франции № 2245206,
кл. В 66 С 1/68, опублик 1968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочим органом манипулятора | 1978 |
|
SU754002A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Гидропривод захватно-срезающего органа лесозаготовительной машины | 1976 |
|
SU554843A1 |
| Приемно-зажимное устройство лесозаготовительной машины | 1978 |
|
SU709038A1 |
| Привод рабочих органов лесозаготовительной машины | 1980 |
|
SU950989A1 |
| Привод рабочих органов лесозаготовительной машины | 1989 |
|
SU1652703A2 |
| Устройство для срезания и повала деревьев | 1978 |
|
SU725619A1 |
| Привод рабочих органов лесозаготовительной машины | 1977 |
|
SU685868A1 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1992 |
|
RU2044467C1 |