2. Устройство по п. 1, отличающееся тем, что каждая пластина имеет форму треугольника, в основании которого выполнена
выемка для взаимодействия с траверсой, при этом угол поворота пластин находится в пределах О-90°.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата заполненных мешков | 1990 |
|
SU1761610A1 |
| Устройство для захвата заполненных мешков | 1986 |
|
SU1409571A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Устройство для захвата заполненных мешков | 1984 |
|
SU1219463A2 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
| Одноканатный крановый захват для грузов | 1945 |
|
SU68906A1 |
| Устройство для захвата заполненных мешков | 1987 |
|
SU1454748A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| ЦЕНТРОБЕЖНАЯ МАШИНА ДЛЯ ЛИТЬЯ ЧУГУННБ1Х РАСТРУБНЫХ ТРУБ | 1968 |
|
SU221226A1 |
1. УСТРОЙСТВО ДЛЯ ЗАХВАТА ЗАПОЛНЕННЫХ МЕШКОВ, содержащее корпус, пару зажимных роликов, шестерни, приводные рейки и амортизаторы, отличающееся тем, что, с целью повышения надежности в работе, в корпусе образованы пазы, а устройство снабжено расположенной в последних с возможностью возвратнопоступательного перемеш.ения траверсой, соединенной с приводными рейками и амортизаторами, поворотной осью, соединенной при помошн штанги с одним из зажимных роликов, и шарнирно укрепленными в корпусе над пазами пластинами для фиксации траверсы, при этом шестерни установлены на поворотной оси.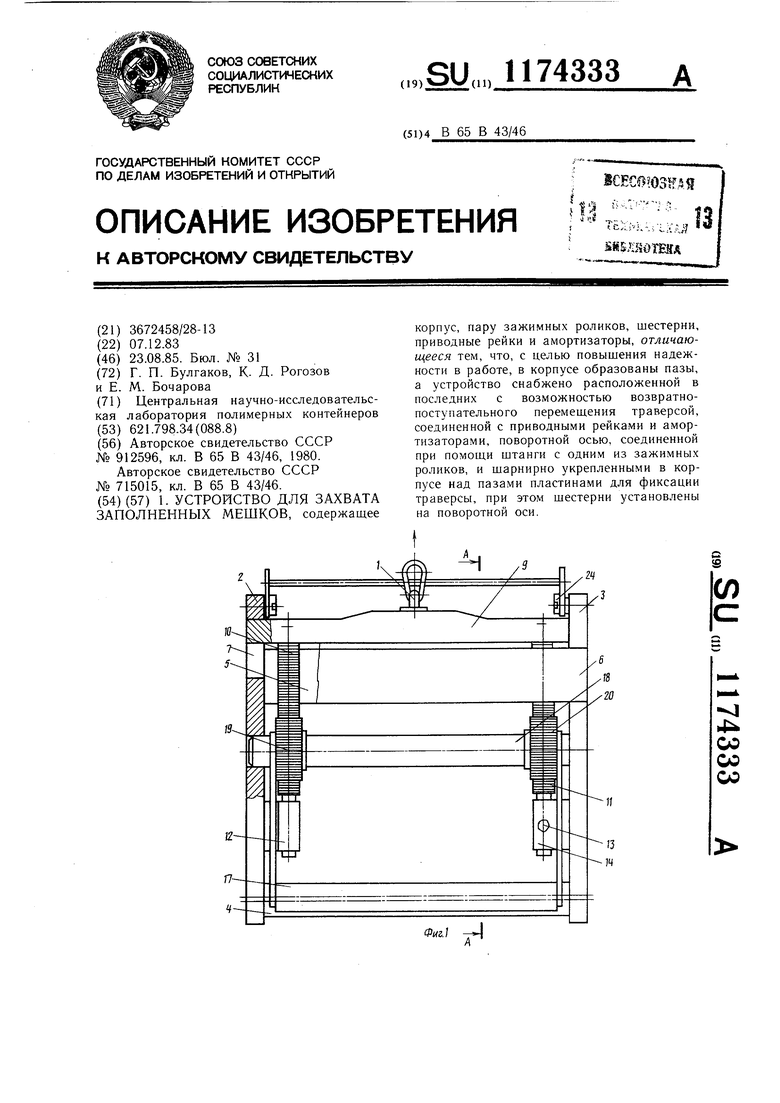
1
Изобретение относится к погрузочноразгрузочным работам и может быть использовано при транспортных работах с заполненными мешками.
Целью изобретения является повышение надежности работы.
Использование изобретения в народном хозяйстве позволит уменьшить потери при транспортных работах с заполненными мешками.
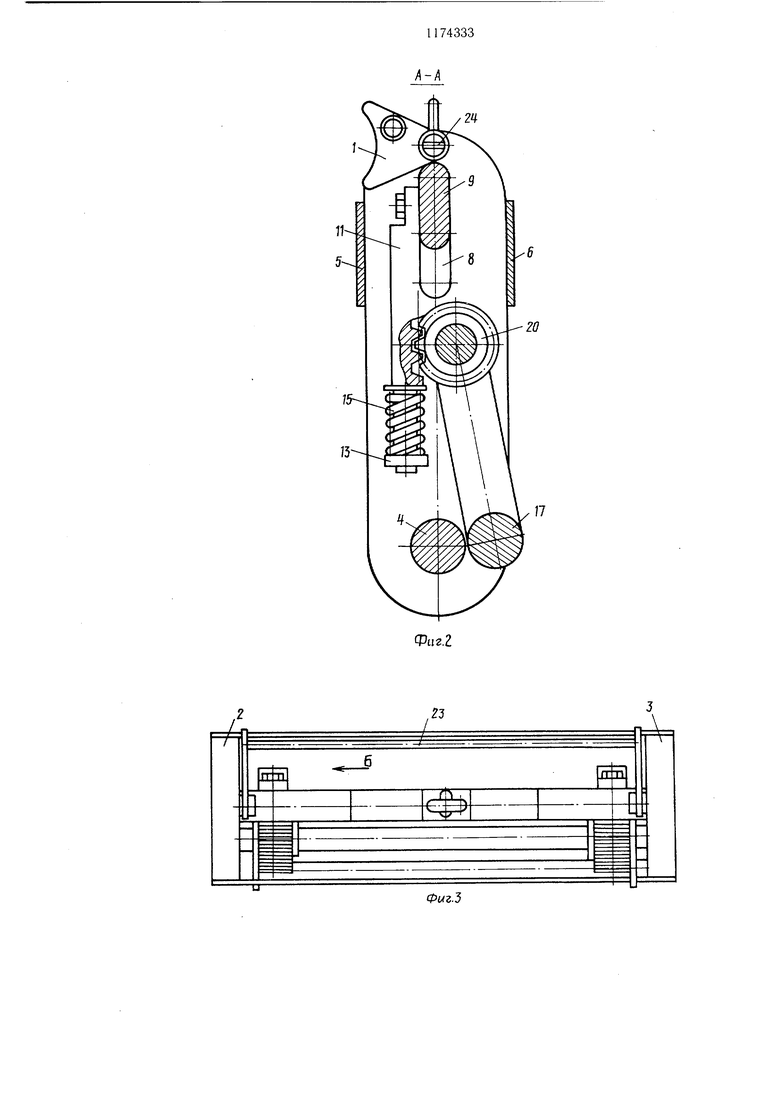
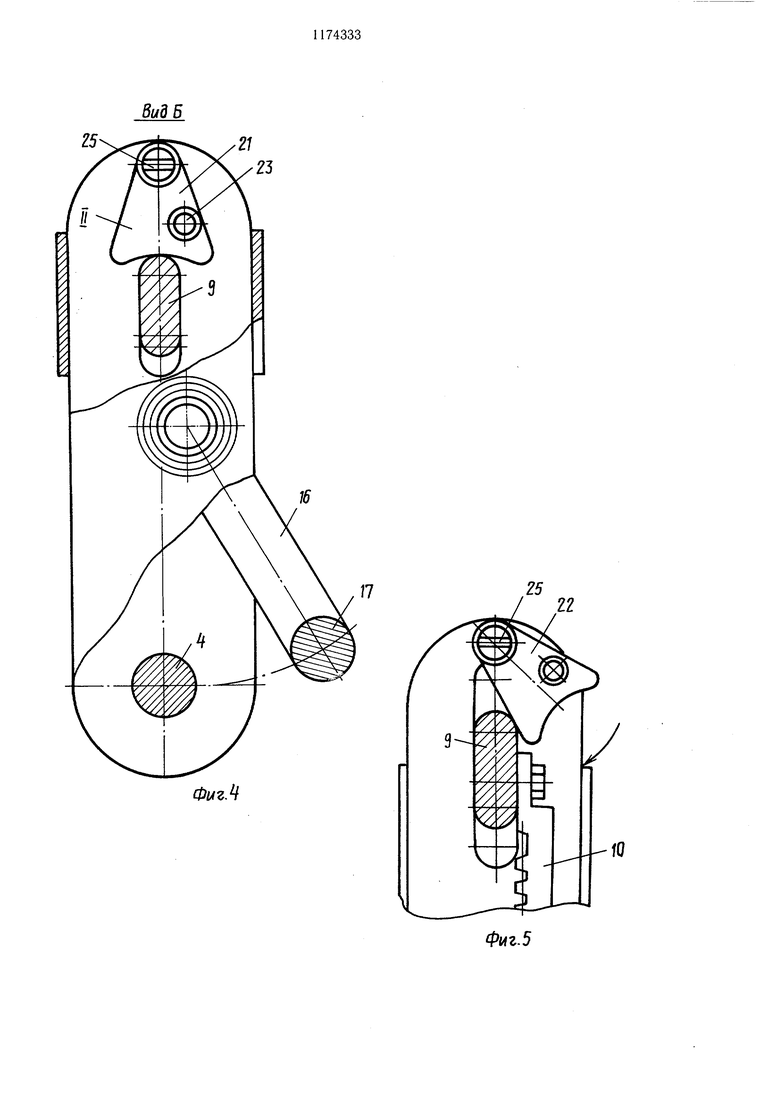
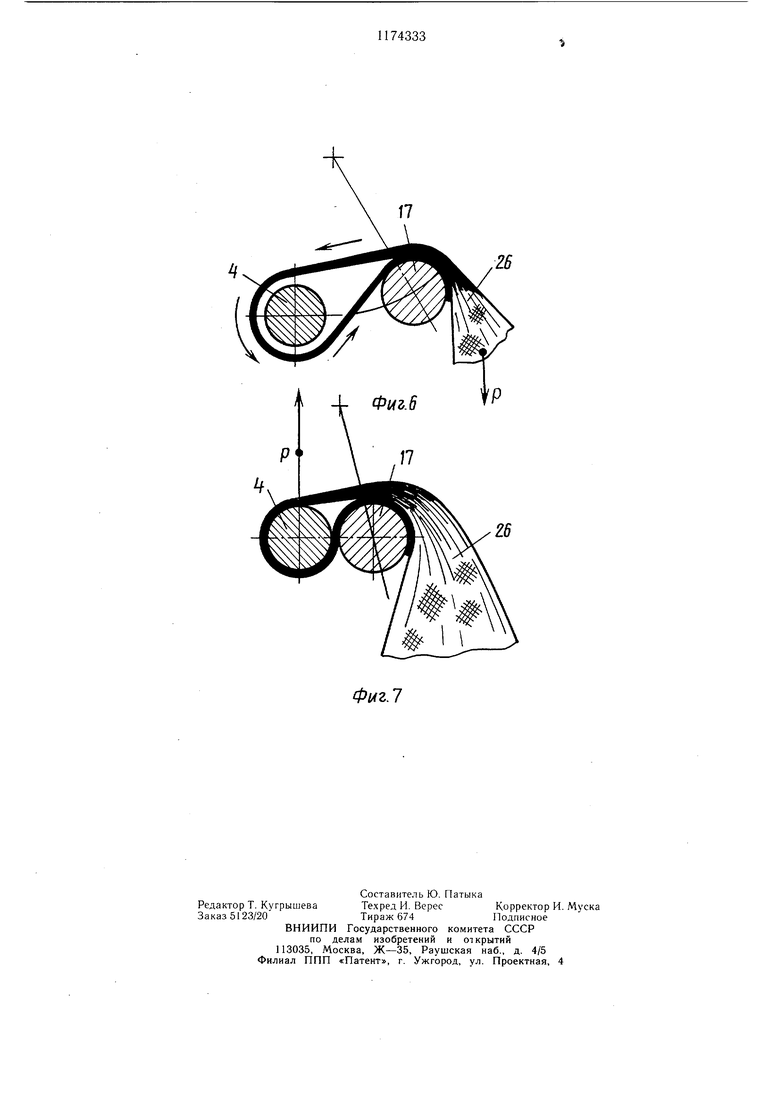
На фиг. 1 изображено устройство, обший вид; на фиг. 2 - сечение А-А на фиг. 1 (устройство в рабочем положении); на фиг. 3 - то же вид сверху; на фиг. 4 - вид Б на фиг. 3(устройство в исходном положении, т.е. при заправке горловины); на фиг. 5 - узел фиксатора; на фиг. 6 - заправка горловины контейнера; на фиг. 7 - зажатие горловины при подъеме.
Устройство для захвата заполненных мешков содержит корпус 1, состоящий из двух боковых пластин 2 и 3, соединенных между собой осью 4 и пластинами 5 и 6. В боковых пластинах 2 и 3 сделаны пазы 7 и 8 по форме концов траверсы 9. Траверса 9 соединена с рейками 10 и 11 одним концом, а другие концы реек находятся в направляюших 12 и 13. Направляющие 12 и 13 имеют амортизаторы 14 и 15, выполненные, например, в форме пружин. Амортизаторы обеспечивают опускание траверсы вниз при снятии действия поднимаемого груза. Поворотная рамка 16 имеет оси 17 и 18. На оси 18 находятся шестерни 19 и 20, которые входят в зацепление с рейками 10 и 11, а ось 18 может поворачиваться в боковых пластинах 2 и 3 корпуса 1. Пластины 21 и 22 для фиксирования траверсы соединены между собой рукояткой 23, оси вращения пластин 24 и 25 расположены в верхней части корпуса 1 симметрично относительно пазов 7 и 8. Высота пластин зависит от угла раскрытия зажимных осей. Пластины имеют форму треугольника, в основании которого имеется выемка. Крюк грузоподъемного механизма цепляют за кольцо траверсы. Горловина контейнера 26 заправляется на оси 4 и 17 (фиг. 6, показано стрелками). Пластины 21 и 22 за рукотку 23 выводятся из вертикального положения и за счет собственного веса устройства траверса 9 перемещается в верхнее положение
пазов 7 и 8, отклоняя пластины 21 и 22 на угол 90° (фиг. 2). Рейки 10 и И, находясь в зацеплении с щестернями 19 и 20, при перемещении вверх сжимают амортизаторы 14 и 15 и поворачивают рамку 16 5 на определенный угол, сближая оси 4 и 17 (фиг. 7). При дальнейшем подъеме захватного устройства вес поднимаемого груза воздействует на оси 4 и 17, осуществляя зажатие горловины контейнера 26 с усиQ лием поднимаемого груза. При опускании груза и достижении им опорной поверхности его воздействие на оси 4 и 17 прекращается, под действием амортизаторов 14 и 15 траверса 9 и рейки 10 и И опускаются вниз, поворачивается шестерня 19 и 20 в противоположную сторону и тем самым разводят оси 4 и 17 на определенный угол. Перед началом подъема груза пластины необходимо вывести из нулевого положения, вручную опустив траверсу вниз. Поэтому нижQ НИИ конец траверсы за счет действия амортизаторов не дойдет до конца пазов на 5-8 мм. Во время работы пластины должны занимать два положения. Первое - устойчивое вертикальное положение, принимаемое при угле поворота, равном нулю,
5 траверса находится в нижнем положении, при этом вертикальные оси симметрии пластин совпадают с осью симметрии траверсы. Для гарантированного удержания траверсы в нижнем положении во время заправки . горловины контейнера для захвата пластины имеют в нижней части выемки, по форме соответствующие контактирующей поверхности траверсы, глубиной 3-5 мм. Второе положение - неустойчивое, угол поворота пластин больше нуля, но не превышает 90°. Гарантированное возвращение пластин после их отклонения на 90° и совмещение их осей симметрии с осью симметрии траверсы осуществляется за счет с.мещенного центра тяжести пластин. При опускании траверсы 9 вниз плас° тины 21 и 22 из положения I (фиг. 2) переходят в положение II (фиг. 4), удерживая траверсу в нижнем положении, т.е. осуществляя раскрытие осей на определенный угол. При дальнейшем подъеме
5 захватного устройства оси находятся в раскрытом состоянии и под действием веса контейнера происходит освобождение горловины из захвата.
11
13
.23
Вид Б
21
гъ
ФигМ
гг
Фиг. 5
26
Фиг.7
| Устройство для захвата горловины мягкой тары | 1980 |
|
SU912596A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для захвата заполненных мешков | 1978 |
|
SU715015A3 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
