(54) КОНВЕЙЕРНЫЕ ВЕСЫ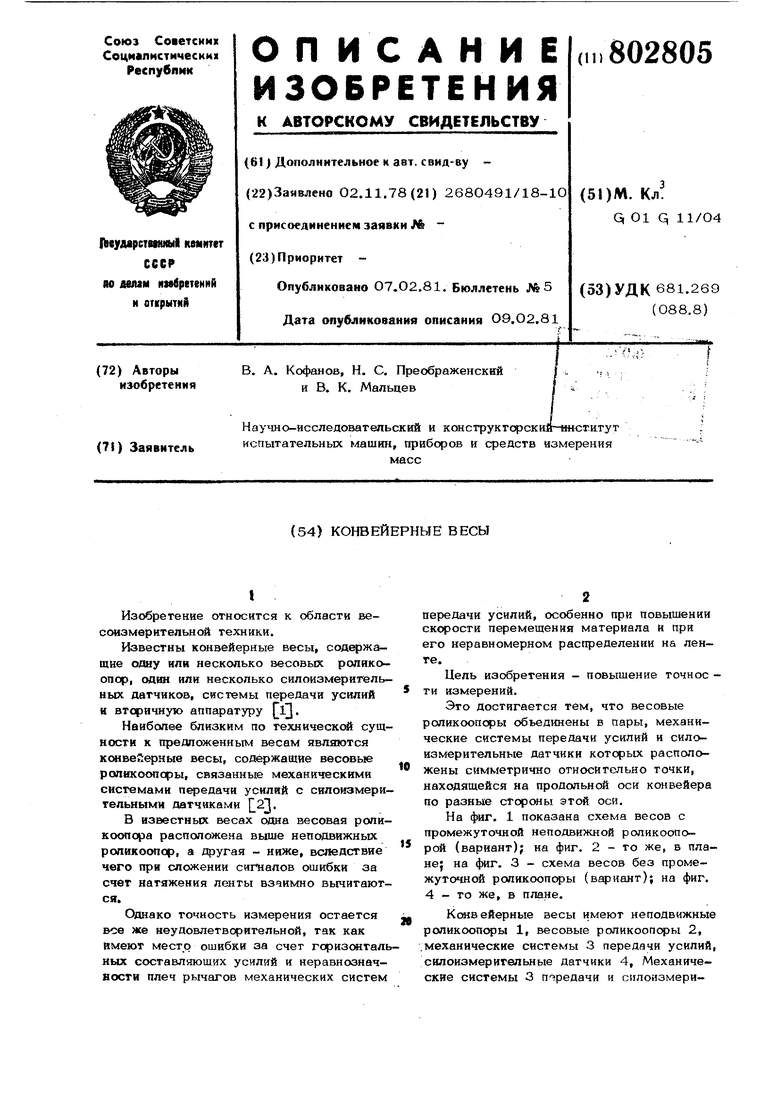
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Конвейерные весы | 1978 |
|
SU767544A1 |
| Конвейерные весы | 1982 |
|
SU1084620A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2005 |
|
RU2289797C1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЕСА ПЕРЕМЕЩАЕМЫХ МАТЕРИАЛОВ НА ЛЕНТОЧНЫХ КОНВЕЙЕРАХ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ВЕСОВАЯ РОЛИКООПОРА ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2401994C1 |
| Конвейерные весы | 2018 |
|
RU2733977C2 |
| Конвейерные весы | 1987 |
|
SU1451554A1 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| Конвейерные весы | 1976 |
|
SU714160A1 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
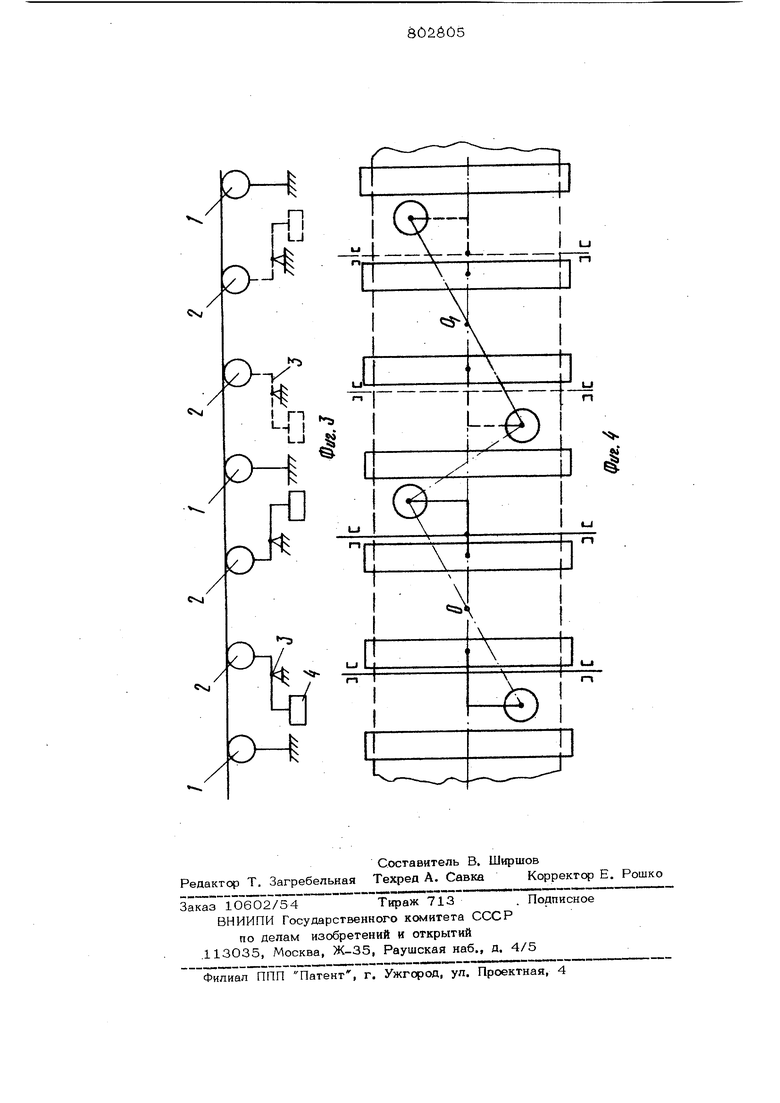
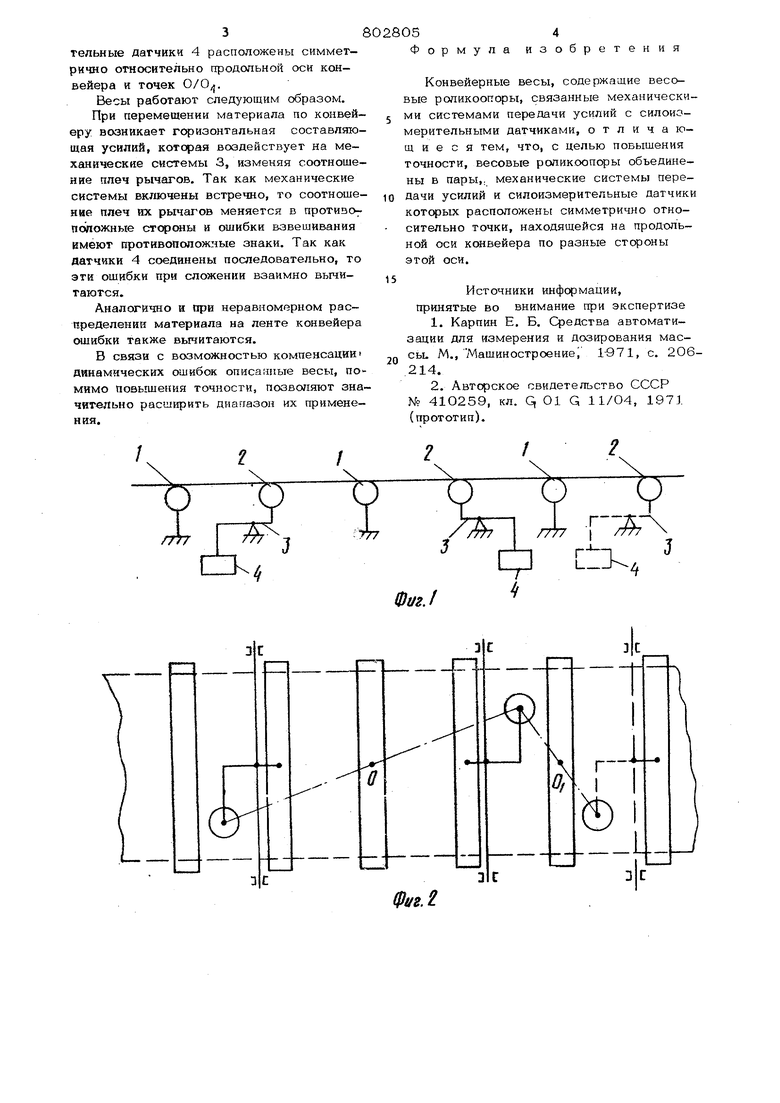
Изобретение относится к области весоизмерительной техники. Известны конвейерные весы, содержащие одну или несколько весовых роликоопор, один или несколько силоизмеритель ных датчиков, системы передачи усилий и вторичную аппаратуру l. Наиболее близким по гехническсй сущ ности к предложенным весам являются конвейерные весы, содаржашие весовые ропикоопоры, связанные механическими системами передачи усилий с силоизмери тельными датчиками 2Т. В известных весах одна весовая роликоопора расположена выше неподвижных ропикоопор, а другая - ниже, вследствие чего при сложении сншалов ошибки за счет натяжения ленты взаимно вычитаются. Однако точность измерения остается все же неудовлетворительной, так как имеют место ошибки за счет горизсятал составляющих усилий и неравнозначвости плеч рычагов механических систем передачи усилий, особенно при повышении скорости перемещения материала и при его неравномерном распределении на ленте. Цель изобретения - повышение точное - ги измерений. Это достигается тем, что весовые роликоопоры объединены в пары, механические системы передачи усилий и силоизмерительные датчики которых расположены симметрично относительно точки, находящейся на продольной оси конвейера по разные стороны этой оси. На фиг. 1 показана схема весов с промежуточной неподвижной роликоопорой (вариант); на фиг. 2 - то же, в плане} на фиг. 3 - схема весов без промежуточной роликоопоры (вариант); на фиг. 4 - то же, в плане. Ксивейерные весы имеют неподвижные роликоопоры 1, весовые роликоопоры 2, механические системы 3 передачи усилий, силоизмеригельные датчики 4, Механические системы 3 передачи и снлоизмерительные дагчики 4 расположены симметрично относительно продольной оси конвейера и точек О/О,;. Весы работают следующим образом. При перемещении материала по конвейеру возникает горизонтальная составляющая усилий, которая воздействует на механические системы 3, изменяя соотношение плеч рычагов. Так как механические системы включены встречно, то соотношение плеч их рычагов меняется в против(пЬяожные стфсшы н ошибки взвешивания имеют противоположные знаки. Так как датчики 4 соединены последовательно, то эти ошибки при сложении взаимно вычитаются. Аналогично и при неравномерном распределении материала на ленте конвейера ошибки также вычитаются. В связи с возможностью компенсации динамических ошибок описанные весы, помимо повышения точности, позволяют значительно расширить диапазон их применения.
I /777
г
ф
4
05 Формула изобретения Конвейерные весы, содержащие весовые роликоогторы, связанные механическими системами передачи усилий с силоизмерительными датчиками, о т л и ч а юш и е с я тем, что, с целью повышения точности, весовые роликоопоры объединены в пары,, механические системы передачи усилий и силоизмерительные датчики которых расположены симметрично относительно точки, находящейся на продольной оси конвейера по разные стороны этой оси. Источники информации, принятые во внимание при экспертизе 1.Карпин Е. Б. Средства автоматизации для измерения и дозирования массы. М., Машиностроение 1-971, с. 206214. 2.Авторское свидетельство СССР № 41О259, кл. G, 01 Q 11/О4, 1971 (прототип).
(Г
