1
Изобретение относится к самонас раивающимся системам и может найти применение при проектировании систем управления многопараметричесйими объектами в условиях неопределенности.
Известен способ адаптивного управления, при котором за заданный отрезок времени выделяют сигнал, соответствующий изменению параметра контролируемого процесса, и используют его для воздействия на сам процесс 1.
Однако этот способ не обеспечивает высокое качество управления, так как адаптация происходит путем сравнения параметра контролируемого процесса с предыдущим значат нием и не пригоден для управления нестанционарными процессами.
Наиболее близким по технической сущности к изобретению является способ адаптивного управления многопараметрическими объектами в условиях неопределенности, основанный на измерении для каждой системы ,ее выходных сигналов, сигналов возмущений и сигналов, соответствующих параметрам объекта и параметрам положений органов управления.
формировании по измерении сигналам первого многомерного сигнала состояния системы, формировании предельных сигналов управлений, измерении сигналов управления, формировании для каждого параметра выходного сигнала каждой системы статистического эталонного выходного сигнала, формировании сигналов
O рассогласования между выходными сигналами систем и статистическими эташоиными выходными сигналами и использовании их для коррекции сигналов управления 2.
5
В этом способе для уменьшения неопределенности в текущем состоянии A.fi используют предысторию объекта, определяемую его состояниями Л. на«.-1 предшествующих ша0irax управления и наблюдаемыми данными Xjt-- , связанными с этими -состояниями Н управляющими дeйcтвия вI Уц- .
Неопределенность возникает из5за неполного знания структуры характеристик объекта управления, а соответственно- незнания априорного распределения состояний объвкта Р(Л(Х., , V )/ а также ста0тистической зависимости данных
наблюденияХц от состояний объекта управления А, f и, как следствие, функции правдоподобия Рц(Хк( i .
В процессе функционирования объекта с течением времени неопределенность этих характеристик устраняют адаптивным путем и тем са№лм улучшают качество управления.
Недостатком этого способа является то, что он предназначен для работы в условиях стационарных внешних воздействий и параметров объектов. На практике в больишнстве случаев возмущающие воздействия и параметры объектов нестационарны во времени. Наложение ограничений стационарности управляемых процессов делает этот способ неприемлемым для большинства решаемых задач, особенно для управления большими системами.
Задача адаптивного управления нестационарными процессами в условиях неопределенности известными способами не решается.
Кроме того, известный способ не обеспечивает качества управления так как имеет узкую область применения, низкие быстродействие и точность. Способ мало эффективен, так как адаптацию управляющего воздействия осуществляют без учета вида возмущающих воздействий, что.не позволяет эффективно использовать имеющийся ресурс воздействий. Кроме того для вхождения в режим требуется длительное накопление значительной предыстории объекта, причем во многих случаях предыстория должна содержать данные за несколько лет.
Цель изобретения - повышение точности л быстродействия, расширение области применения, сокращение времени на пусковой режим при управлении каждой системой.
Достигается это тем, что по первым многомерным сигналам состояний систем формируют многомерный обобщенный сигнал и разлагают его по уровню на статистически однородные сигналы по каждому параметру выходного сигнала, формируют для каждой системы по сигналам, соответствующим параметрам объекта и параг метрам.положений органов управления, сигналам возмущений и предельным сигдалам управлений второй многомерный; сигнал состояния сисуемы, для которого по каждому статистически однородному сигналу каждого параметра выходного сигнала многомерного обобщенного сигнала форми-. руют сигнал пороговых уровней, сравнивают их с вторыми многомерными сигналами состояний систем, Формируют по уровню группы первых многомерных сигналов, из которых выделяют группы сигналов, соответствующих параметрам объекта и параметрам выходных сигналов систем, определяют по ним первые статистические эталонные сигналы, масштабируют их по уровням сигналов, соответствующим параметрам объектов, и для каждой системы Лормируют по параметрам выходного сигнала системы вторые статистические эталонные сигналы, сравнивают их с выходными и входными сигналами системы и форруют соответственно первый и второ корректирующие статистические сигн рассогласования; для каждой системы сравнивают первый корректирующий статистический сигнал рассогласования с пороговым сигналом рассогласования, полученным сигналом корректируют сигналы управления системы, измеряют приращения си: налов управления и по сигналам, соответствующим измеренным сигналам приращений сигналов управления системы, и первым статистическим сигналом рассогласования формируют : первый многомерный корректирующий сигнал состояния системы, для каждой системы при равенстве нулю первого корректирующего статистического сигнала рассогласования. по сигналам управления и значениям параметров выходного сигнгша систем той же группы, формируют второй многомерный корректирующий сигнал состояния cиcтe ФJ.
Как правило, каждая большая система является уникальной. Однако эта уникальность определяется уникальностью группы входящих в слстему разнородных объектов нижнего уровня иерархии , хотя сами по себе эти объекты не являются уникальными, что и позволяет в предлагаемом способе одновременно адаптировать большое количество однотипных систем, входящих в состав различных больших систем.
Будем считать каждую автономную систему, адаптируемую предлагаемым способом, подсистемой общей системы адаптации. Каждаяtl.-я подсистема имеет множество допустимых значений управляющего воздействия
Уу-п
- На объект управления и орган управления каждой подсистеьвл дейст вуют возмущающие воздействия F , которые можно представить как сумму глобальной РОЛ и локальной составляющих
FM in + f,
где . - представляет собой математическое ожидание контролируемых и неконтролируемых возмущений .
fyi- CFtJ+ fFHfcnJ/
где F|cft, - случайная контролируемая .компонента возмущающего воздействия, переменная во времени по отношению к объектам группы; FHK случайная неконтролируемая компонента возмущающего воздействия; I /Ц - математическое ожидание
F/M-AF fAFH/f -tuFfTj,
) - шумовая составляющая возмущающего воздействия, которая может быть представлена белым шумом.
Для большинства систем компенсация локальных иглобальных возмущений в соответствии с данными вьшда определениями требует различных векторов управляющих воздействий. Соответственно и сигнал рассогласования может быть разделен на глобальную и локальную компоненты.
Будем считать локальную компоненту сигнала рассогласования первым корректирующим статистическим сигналом рассогласования, а сигналы управлений, направленных на ее минимизацию, сигналами первыхуправлений. Соответственно глобальную компоненту сигнала рассогласования будем считать вторым корректирующим статическим сигналом рассогласования.
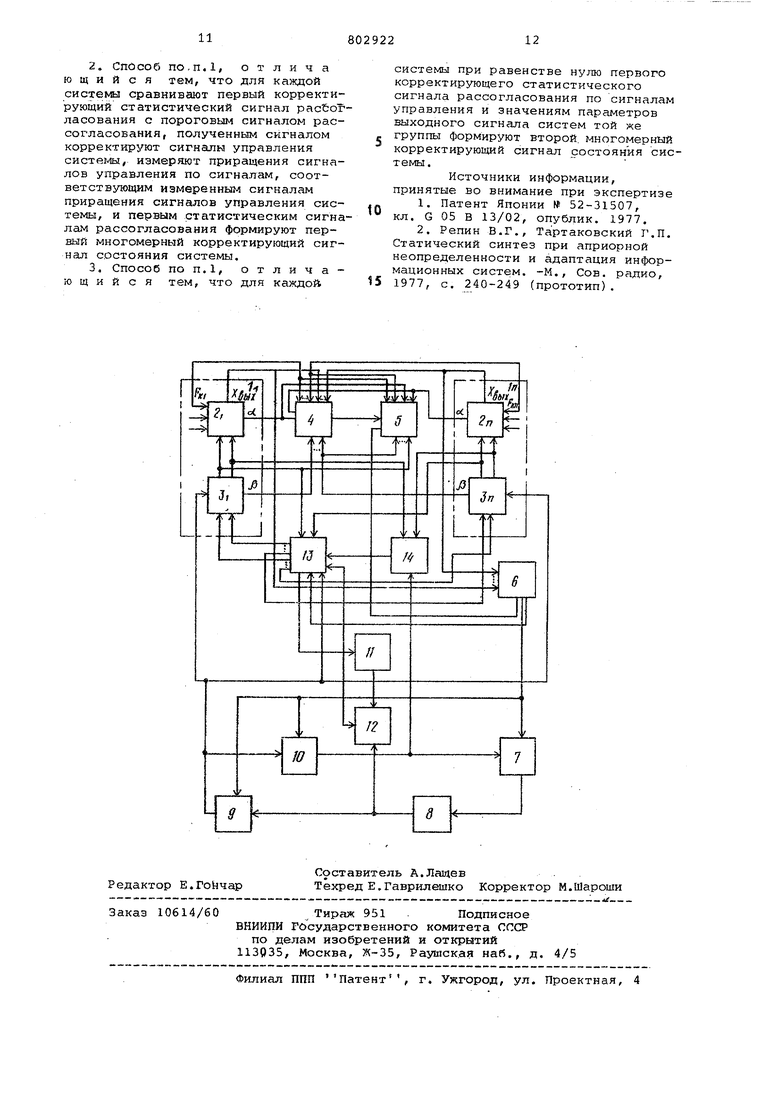
На чертеже дана блок-схема систесистемы адаптации для осуществления предлагаемого способа.
Она содержит подсистемы If- In. с объектами управления 2 у - 2 р, и . блоками управления 3 -/ - , формирователь 4 классов, блок 5 идентификации, блок 6 группировки, формирователь 7 первых статистических эталонов, блок 8 формирования вторых статистических эталонов, устройство 9 определения локальной составляющей рассогласования, ключ Ю, формирователь 11 оптимальных характеристик процесса, устройство 12 определения глобальной составляющей рассогласования, блок 13 адаптивной оптимизации и блок 14 группировки.
Система адаптивного управления работает следующим образом. Сигналы, связанные с параметрами контролируемых выходных процессов Xfewx «,п ( индекс параметра выходного процесса), контролируемая часть возмущающего воздействия Fim , сигналы параметров объекта управления и блока управления р, а также сигнал допустимых предель11ЫХ управлений Vjo п формирующие .первый, многомерный сигнал состояния системы „((Х, р ,Хьь(х ., F-fc .,
, Vgon. ) со всех систем 1 - i поступает в формирователь 4 клас-.. сов.
в формирователе классов по поступившим первым многомерным сигналам формируется многомерный обобщенный сигнал Va. ( Vj г .. . V ) и разлагается, методами кластерного анализа на статические однородные по каждому параметру выходного сигнала х. промежуточные составляющие; i - индекс параметра выходного процесса.
Из первого многомерного сигнала
o .выделяют компоненты сигналов о параметрах объекта системы, органов управления, сигналы контролируемых возмущений и сигналы допустимых управлений и формируют по ним второй многомерный сигнал состояния
5
системы Уза ( Ргг Ffcn Voon ) являющийся, как и сигналы,по кото|-. рым он сформирован, компонентой сигнала Vy .
В формирователе классов для мно0гомерного сигнала V определяются статистические характеристики по каждой промежуточной составляющей сигнала у и формируются сигналы пороговых уровней разбиения с игна5лов V3 на группы для каждого -го параметра выходного сигнала, системы. Сигналы уровней поступают в блок идентификации 5. В этот же блок поступает составляющая УЗ сиг0нала V.| . Одновременно составляющая Х1П. сигнала V/n поступает на вход блока группировки 6. На другой вход блока б поступает выделенный из сигнала V-i сигнал параметров объек5та ,.Путем сравнения сигнала Vj с сигналами пороговых уровней сигнал У, идентифицируется с одним из.. классов сигнала одного из параметров выходного процесса. Операция идентификации каждого сигнала Vm
0 повторяется по числу параметров выходного процесса и каждый сигнал Ил попадает в т групп, где т число параметров выходног.о процесса.
5
Число классов выходных сигналов по каждому параметру различно (в частном случае может совпадать). Отдельные классы кюгут существовать длительное время.
0
При идентификации vm по каждому i-му параметру выходного сигнала фактический уровень сигнала этого параметра в сигнале V не учитывается. По результатам идентифик.а-. .
5 ции блок 5 вырабатывает сигнал коммутации, который поступает на тре- . тий вход блока б. В соответствии . с этим сигналом блок б группирует сигналы Л-Ьклгг , о(л. (гго классам
О сигналов t-го параметра) выходного процесса.
Сгруппированные Х{,ых поступают н.а вход формирователя 7 первых статистических эталонов; В формиро5вателе 7 строится статистическая
модель выходного сигнала для каждой группы X у л i, индекс группы (класса).
При построении статистической модели Х(,(. для группы систем полная статистическая неопределенность в распределении заменяется параметрической неопределенностью с последующим уточнением параметро распределения, т.е. определяются и затем уточняются закон распределения и его параметры. Для многих :. процессов с последействием в качестве исходной функции распределения было использовано гамма-распределение
S -(,1 - хЬнх г, -, ( f(b-i).l,
где , XibtixX - с математическим ожиданием И и дисперсией Ъ;
П математическое, ожидание выходного процесса группы систем. Коэффициенты О и 5 определяется
по формулам;
о S - Р .
с целью использования построенной модели для управления каждой конкретной системой ее параметры приводятся к параметрам соответствующей система в блоке 8, где формрфуется второй статистический эталонный сигнал и поступает на вход устройства 9 определения локальной составляющей рассогласования.
В устройстве 9 вычисляют РдХсл| вероятность отклонений между М Xfoiix f и М ,;(; для каждой системы, которую после Лункцио. преобразовани я применяют за локальную составляющую сигнала рассогласования и . .Для оценки 4 была, например, использована функция f/- вида
, , (Onfu
(,,7,,,П,
где-6 и w - масштабирующие коэЛЛициенты;Р - вероятность отсутствия
рассогласования; пороговое значение Р Выходной сигнал устройства 9 поступает на первый вход блока 13 адаптивной оптимизации, на вход ключа 10 и на входы блоков управления 3 - 3j систем - 1,
На вход блока 12 Формирования глобальной составляющей рассогласования поступают вторые статистические эталонные сигналы и входной сигнал из блока 11. Входной сигнал Х{); либо задается вне системы адаптации и выдается из блока 31 в виде постоянного для каждой системы уровня, либо вырабатывается в блоке 11, исходя из требования х im min Хг,, . В этом случае в формирователе 11 определяются характеристики процесса, соответствуюиие расчетному оптимальному значению глобального управляющего воздействия путем построения статистической или имитационной модели, которая настраивается в процессе функционирования системы и используется затем для обеспечения Формирования требуемых значений входного сигнала. Выходной сигнал формирователя 11 поступает на /вход устройства 12 формирования глобальной составляющей рассогласования, где путем сравнения входного сигнала и второго эталонного сигнала, полученных в формирователях 8 и 11, нанаходят глобальную составляющую
сигнала рассогласования, которая поступает на второй вход блока 13.
Выходной сигнал рслюча 10 и глобальная составляющая управляющего воздействия с выходов блока 3 Зо управления систем 1 - 1 поступают в ; блок 14 группировки. С выхода блока 14 сигналы, соответствующие глобальной составляющей управ ляющего воздействия систем, локальные соответствующие рассогласования которых равны нулю, поступают на третий вход блока 13 адаптивной оптимизации. При этом первый корректирующий статистический сигнал рассогласования - локальную составляющую сигнала рассогласования используют сравнивая его с пороговым сигналом для (Нормирования сигналов коррекции первого управления, которое формируется в блоке 13 и поступает на входы блоков управле-: ния соответствующих систем, с выхода первого (локального) управления систем, на которые поступил
сигнал коррекции, на соответствующие входы блока адаптивной оптимизации 13 поступают сигналы приращения первого управления. По этим
сигналам в блоке 13 в соответствии
с сигналами синхронизации, поступающими из блока группировки 6,; фopмиps oт первый мнЬгомерный корректирующий сигнал УН для каждой группы выходных сигналов ,,, 2 по
каждому параметру по сигналам,
соответствующим измеренным приращениям первых сигналов управлений и локальным рассогласованиям, и используют полученный сигнал для
адаптации сигнала коррекции и фор- .
MipoBaHHH результирующего первого управления, обеспечивая
nit« J Д . to
где to начальный момент возникновения локального рассогласования.
Глобальную составляющую управляющего воздействия адаптируют по второму многомерному корректирующему сигналу lg, полученному путем группировки по сформированньои в блоке 4 классам для каждого процесса выходных сигналов и управляющих воздействий систем - « Для которых 4 Х для данного процесса равна нулю, т.е. находится в допустимых пределах, при этом определяют минимум ) например, байессовским методом.
Адаптированные составляющие коррекции управляющего воздействия поступают- раздельно на соответствующие входы всех блоков 3- - Зд управления подсистем 1| - 1,. Таким образом задача адаптации управления нестационарными процессами в условиях неопределенности решается путем одновременной адаптации большог количества однотипных систем.
Эффективность предлагаемого способа повышается за счет раздельного формирования и адаптации локальной и глобальной составляющих управляющего воздействия, направленных на изменение характеристик управляемого процесса в сторону их оптимальны значений, что обеспечивает эффективное использование имеющегося ресурса воздействий.
Повышение точности достигается понижением; дисперсии управляемых процессов за счет их расслоения; иск71р)чением нелинейностей разрывного типа при расслоении процессов; понижением дисперсии оценки за счет использования коррелированных групповых отсчетов; понижением дисперсии оценки за счет увеличения числа наблюдений, которое обеспечивает увеличение точности оценки в VJj раз где и - число сгруппированных реализаций процесса, исходя из требований статистической достаточности; ft 20.
Общее повышение точности определения статистической модели процесса не менее 1-2 десятичных порядков
Быстродействие процесса адаптации увеличивается за счет возможности использования одновременно ряда шагов поиска экстремума в управляющих воздействиях как при активном, так и при пассивном обучении систекы адаптации.
Система, построенная в соответствии с предлагаемым способом адаптивного управления, входит в режим на несколько циклов прмня-.
тия решений и далее адаптивным,путем улучшает алгоритм функционирования в соответствии .с изменением его условий.
Формула изобретения
1. Способ адаптивного управления системами в условиях неопределенности, основанный на измерении для каждой системы выходных сигналов, сигналоввозмущений и сигналов , соответствующих параметрам объекта и параметрам положений органов управления, формировании по измеренным сигналам первого многог мерного сигнала состояния системы, формировании предельных сигналов управлений, измерении сигналов
управления, формировании для каждого параметра выходного сигнала каждой системы статистического эталонного выходного сигнала, формировании сигналов рассогласования - между выходными сигналами систем и статистическими эталонными выходнЕл и сигналами и использовании их для коррекции сигналов управления, отличающийся тем, что, с целью расширения области применения, повышения точности и быстродействия способа, в нем по первым многомерным сигналам состояний систем формируют многомерный обобщенный сигнсш и разлагают его по уровню на статистически однородные сигналы по каждому параметру :выходного сигнэла, формируют для каждой системы по сигналам, соответствующим параметрам объекта и параметрам положений органов управления, сигналам возмущений и предельным сигналам управлений второй многомерный сигнал состояния системы, для которого по каждому статис.тически однородному сигналу каждого параметра выходного сигнала многоiMepHoro обобщенного сигнала формируют сигналы пороговых уровней, сравнивают их со вторыми многомерными сигналами состояний систем, формируют по уровню группы первых многомерных сигналов, из которых выделяют группы сигналов, соответствующих параметрам объекта и параметрам выходных сигналов систем, определяют по ним первые статистические эталонные сигналы, масштабируют их по уровням сигналов, соответствующим параметрам объектов и ;для каждой системы формируют по параметрамм выходного сигнала системы вторые статистические эталонные сигналы, сравнивают их с выходными и входными сигналами системы и формируют соответственно первый и второй корректирующие статистические сигналы рассогласования.
2.Способ по,п.1, отлича ю щ и и с я тем, что для каждой системы сравнивают первый корректирующий статистический сигнал расбог- ласования с пороговым сигналом рассогласования, полученным сигналом корректируют сигналы управления систег ы, измеряют приращения сигналов управления по сигналам, соответствующим измеренным сигналам приращения сигналов управления системы, и первым статистическим сигналам рассогласования формируют первый многомерный корректирующий сигнал состояния системы.
3.Способ ПОП.1, отличающийся тем, что для каждой
системы при равенстве нулю первого корректирующего статистического сигнала рассогласования по сигналам управления и значениям параметров выходного сигнала систем той же группы формируют второй, многомерный корректирующий сигнал состояния системы.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии № 52-31507, кл. G 05 В 13/02, опублик. 1977.
2.Репин В.Г., Тартаковский Г.П. Статический синтез при априорной неопределенности и адаптация информационных систем. -М., Сов. радио, 1977, с. 240-249 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| СИСТЕМА ИНТЕГРИРОВАННОГО КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2431175C1 |
| СПОСОБ ФОРМИРОВАНИЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТАМИ С НЕОПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ НА ОСНОВЕ ВСТРОЕННЫХ МОДЕЛЕЙ И МОДАЛЬНОЙ ИНВАРИАНТНОСТИ | 2014 |
|
RU2570127C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498494C1 |
| ОПРЕДЕЛЕНИЕ СКОРОСТИ МНОГОМЕРНОГО ПЕРЕМЕЩЕНИЯ В ГЛОБАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2013 |
|
RU2629551C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| Способ и система удаленного мониторинга и прогнозирования состояния технологических объектов | 2020 |
|
RU2739727C1 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОЕКТИРОВАНИЕМ БОРТОВЫХ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ | 2012 |
|
RU2502131C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
