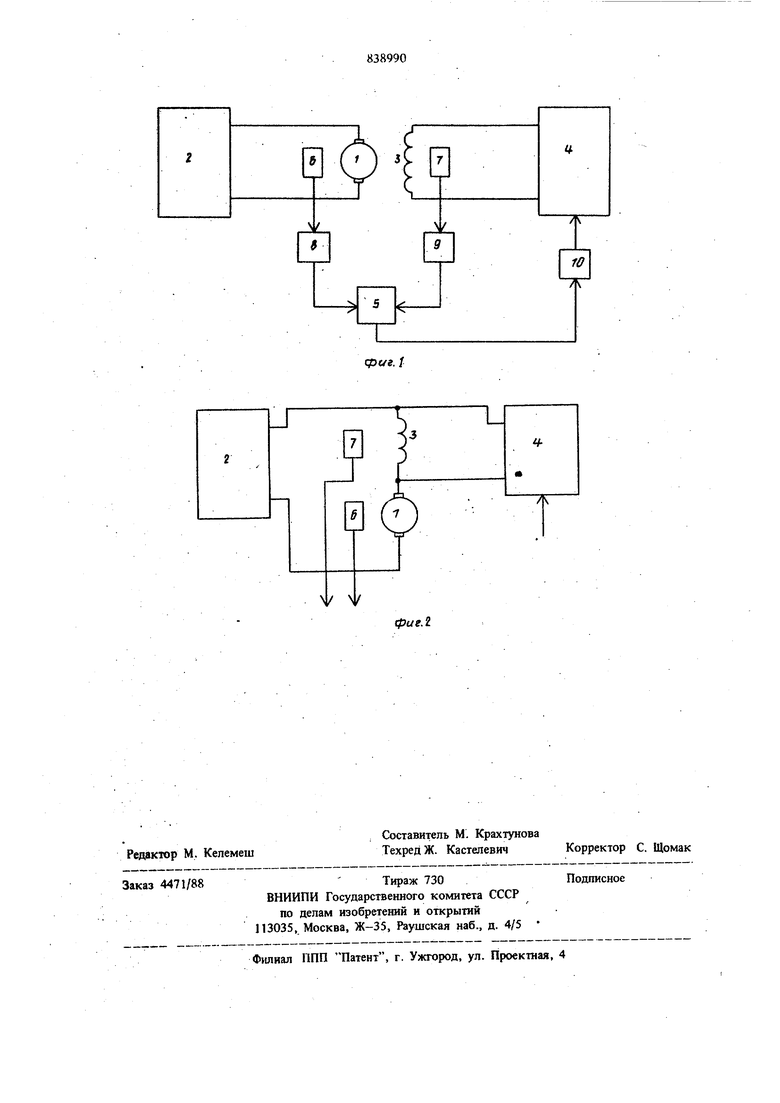
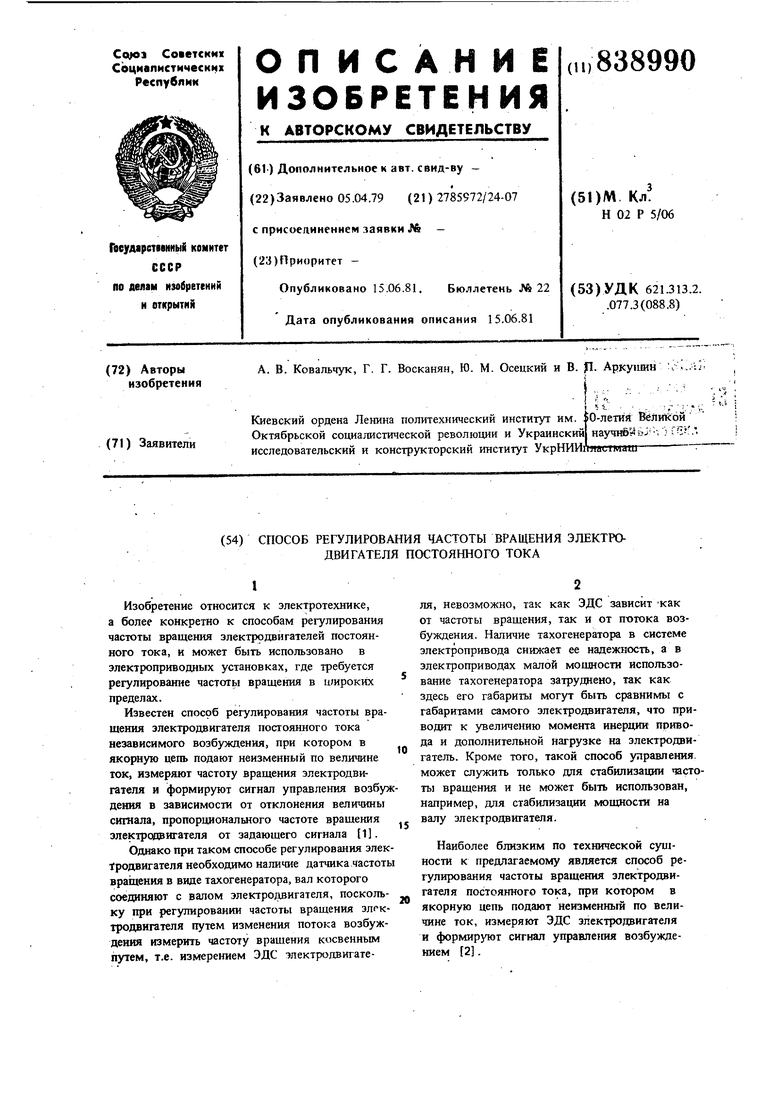
(54) СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА При таком способе управления сигнал, пропорциональный ЭДС электродвигателя, не может быть использован для стабилизации частоты вращения, поскольку ЭДС электродвигателя зависит как от частоты вращения, так и от потока возбуждения, а последний изменя ется при изменении момента нагрузки, т.е. одной и той же частоте вращения соответствуют различные велишны ЭДС электродвигателя. Цель изобретения - расширение диапазона регулирования частоты вращения электродвигателя. Цель достигается тем, что дополнительно измеряют поток возбуждения электродвига-, теля, формируют сигнал, пропорциональный потоку возбуждения, сравнивают его с сигналом, пропорциональным ЭДС и полученным результирующим сигналом управляют возбуждением электродвигателя. На фиг. 1 представлена функциональная схема для управления электродвигателем постоянного тока независимого возбуждения; на фиг. 2 - то же, для электродвигателя последовательного возбуждения. Якорная обмотка электродвигателя 1 подключена к источнику 2 неизменного тока, а обмотка 3 возбуждения - к выходу регулятора 4 напряжения. На входы узла 5 сравн ния от датчика ЭДС и датчика 7 потока во буждения через соответствующие функциональ ные преобразователи 8 и 9 подаются сигналы пропорциональные ЭДС и потоку возбуждения Выходной сигнал узла 5 сравнения через фун циональн ш преобразователь 10 подается на вход регулятора 4 напряжения. Схема для электролригателя последовательного возбуждения отличается тем, что обмотк 3 возбуждения подключена последовательно с якорной обмоткой электродвигателя 1 к выходу источника 2 неизменного тока, а регулятор 4 нгшряжения своими выходными за мами подключается параллельно обмотке 3 возбуждения. Способ заключается в следующем. По якорной обмотке электродвигателя 1 о источника 2 неизменного тока протекает неизменный по Величине ток. При работе электродвигателя датчики 6 и 7 ЭДС и потока возбуждения измеряют соответствующие вели ны. Вь1ходныс сигналы с датчиков 6 и 7 по ступают на соответствующие функциональные преобразователи 8 и 9, которые формируют сигналы, про1юрциона.пьные ЭДС и потоку во буждения электродвигателя. Обозначим велич ну сигнала, формируемого функциональным 4 преобразователем X, как некоторую функцию т действительного значения ЭЛС и, f, (Е) f, (с ф1 ), так как Е Сфи, где U - выходной сигнал функционального преобразователя 8; Е - действительное значение ЭДС электродвигателя;С - конструктивная постоянная электродвигателя; .Ф - поток возбуждения электродвигателя; ii) - частота вращения. Величину сигнала, формируемого функциональным преобразователем 9 в некоторой функции от потока возбуждения, обозначим как U2 f2(O), где Uj - выходной сигнал функционального преобразователя 9. Сигналы и, и Ui подаются на входы узла 5 сравнения, где, в соответствии с требуемым законом сравнения, формируется выходной сигнал узла 5 сравне1шя из f3(U,;U2) fз(cфU);cl)) f4 (.J ). Выходной сигнал узла 5 сравнения Us подается на функциональный преобразователь 10, который формирует из этого сигнала, в соответствии с некоторым законом, сигнал управления регулятора 4 напряжения на обмотке 3 возбуждения, т.. Ф. fs(U3) Р(ф ; ui) ). Так как момент электродвигателя постоянного тока определяется выражением М е 1Ф1 где I - неизменный по величине ток в якорной обмотке электродвигателя, откуда ф- М С Исходя из этого, можно записать 1А / W г- / W - F(-p- ; uj) или а) Р(М). Таким образом, видно, что, изменяя функциональные зависимости f4-fsi можно получить механическую характеристику любого тре буемого вида. Принцип формирования требуемой характеристики проще всего рассмотреть на простейших примерах. Пусть функциональные преобразователи 8 и 9 формируют СИГ1Ш1Ы, пропорциональные ЭДС и потоку возбуждения электродвигателя, таким образом, что на вход узла 5 сравнения поступают сигналы и, К,Е и Uj К, ф , где KI и Kj - поотоянные коэффициенты; в узле 5 сравнения эти сигналы вычитаются, а функциональный преобразователь 10 и регулятор 4 |гапряжсния поддерживают эту разность равной нулю. Таким образом, получим К,Е КзФ или К1сФаи Kj Ф) откуда tiJ тг const, т.е. частота вращения элек1;родвигателя не зависит от момента нагрузки, механическая характеристика электродвигателя является теоретически абсолютно жесткой. Изменяя хотя бы один из коэффициентов К, или Kj, можно изменять заданную частоту вращения двигателя. Если сигнал на выходе функционального преобразователя 8 не зависит от сигнала датчика ЭДС 6, т.е. U, KI , а сигнал на выходе функционального преобразователя 9 связан с сигналом датчика 7 потока возбуж ния таким образом, что Uj , где К К.-2 - постоянные коэффициенты, и в резул тате сравнения зтих сигналов поодерживается их равенство, т.е. Ui Щ илиKjCt) К| , а такжеФ - К, с I получимМ const, т.е. момент электродвигателя одинаков на любой частоте вращения, механические харак теристики обладают нулевой жесткостью. Из меняя хотя бы один из коэффициентов Kj или KJ, можно изменять заданный момент электродвигателя. В отличие от предыдущего примера Uj К,Е, а Uj KJ и приUi Uj К, Е KJ или . К1сФ(.и KJ , Мои -KzJ- следовательно Т.е. электродвигатель работает с постоянной , мощностью на валу. Механические характери стики при этом имеют гиперболический хара тер. Аналогично может быть показано, что, есл поддерживать равенство сигналов Uj и Uj с пекоторой степенью точности и изменять пере даточную функцию функционального преобразователя 10, можно получить механические характеристики электродвигателя с любой требуемой жесткостью. Также может быть показано, .что изменяя передаточные функции функциональных преобразователей 8 и 9, изменяя закон сравнения узла 5 сравнения 5, а также закон формирования сигнала управления функциональным преобразователем 10, могут быть получены характеристики электродвигателя любого требуемого вида. Использование предлагаемого способа регулирования частоты вращения электродвигателя постоянного Тока расширяет функциональные возможности электродвигателя, так как есть возможность получить механическую характеристику любого требуемого вида. Кроме того, при реализации этого способа не требуется наличие в системе электропривода тахогенератора, что повыщает надежность электропривода, а также нет необходимости в дополнительном регулируемом источнике стабилизированного задающего напряжения. Формула изoбpeт eния Способ регулирования частоты вращения электродвигателя постоянного тока, при котором в якорную цепь подают неизменный по величине ток, измеряют ЭДС электродвигателя и формируют сигнал управления возбуждением, отличающийся тем, что, с целью расширеиря диапазона регулирования, дополнительно измеряют поток возбуждения электродвигателя, формируют сигнал, пропорциональный потоку возбуждения, сравнивают его с сигналом, пропорциональным ЭДС и полученным результирующим сигналом, управляют возбуждением электродвигателя. Источники информации, принятые во внимание при экспертизе 1.Миляк А. Н., и Волков И. В. Системы неизменного тока на основе индуктивно-емкостных преобразователей Киев, Наукова Думка, 1974, с. 205-207. 2.Элeктpoтexннкai 1974, № 10, с. 45-48.
3 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1981 |
|
SU961085A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| Устройство для управления возбуждением электродвигателя постоянного тока | 1978 |
|
SU782113A1 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Устройство для определения частоты вращения электродвигателя постоянного тока | 1985 |
|
SU1377997A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| Электропривод | 1981 |
|
SU985911A1 |
| Электропривод постоянного тока с двухзонной системой регулирования скорости | 1977 |
|
SU736319A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом | 1985 |
|
SU1325654A1 |