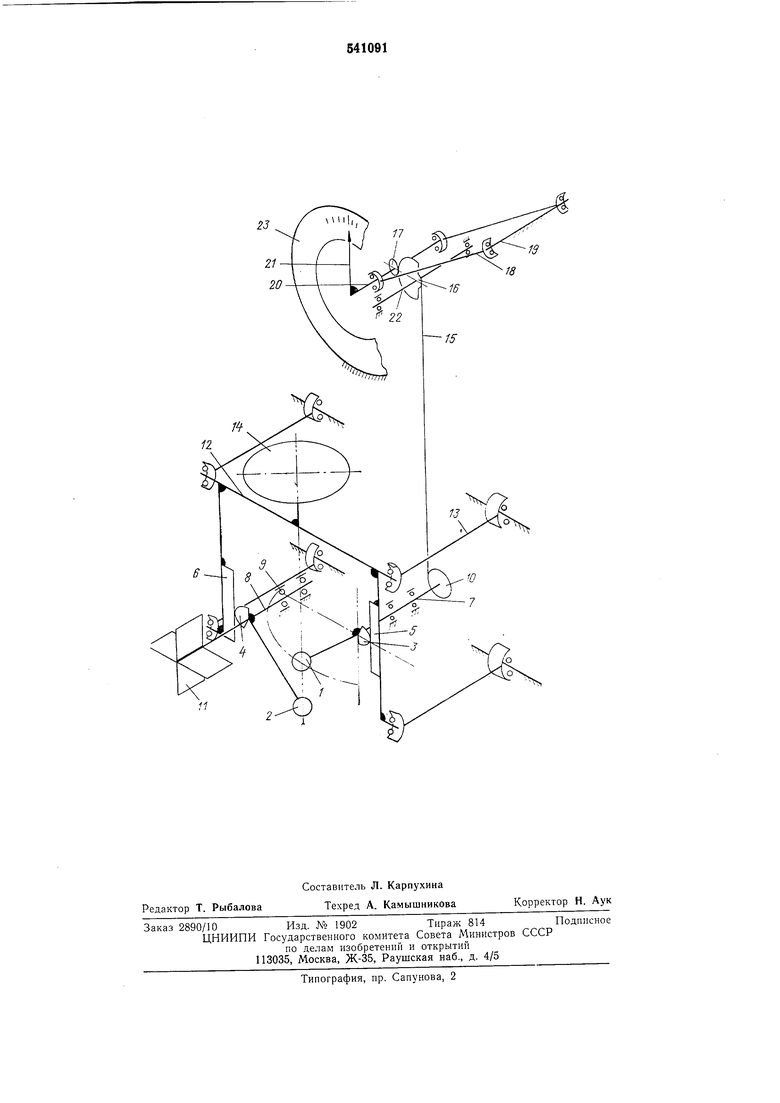
вследствие чего разность ускорении квадрантов и грузовой платформы 14, расположенной по оси симметрии траверсы 12, сведена к минимуму, а при наклонах корнуса весов увеличение момента одного из квадрантов компенсируется уменьшением момента второго квадранта, что обеспечивает устойчивое равновесие механизма независимо от угла наклона корпуса. Нижний кулачок 10 соединен лентой 15 с верхним кулачком 16, часть которого выполнена в виде зубчатого сектора, находящегося в зацеплении с шестерней 17. Рычажный механизм 18, также собранный на шарикоподшипниках, имеет неподвижную ось 19 и подвижную 20 с укрепленными на ней шестерней 17 и стрелкой 21. Кулачок 16 закреплен на оси 22, установленной в шарикоподшипниках. Круговая шкала 23 расположена па корпусе весов соосно со стрелкой 21.
Работают весы следующим образом.
Под действием груза платформа 14 перемещается вниз. Рейки 5 и 6, смещаясь относительно секторов 3 и 4, вызывают отклонение квадрантов 1 и 2. Суммарный момент от двух квадрантов уравновешивает вес (или составляющую веса) груза. При повороте квадранта 1 поворачивается нижний кулачок 10, раднус-вектор которого убывает в функциональной зависимости от возрастания угла отклонения квадранта. При этом с кулачком 10 сматывается лента 15, что приводит в движеиие верхний кулачок 16, центр тяжести которого смещен в сторону сектора. Радиус-вектор кулачка 16 возрастает в функциональной зависимости от возрастания угла отклонения квадрантов. Приращение профиля кулачка 16 равно отрицательному приращению профиля кулачка 10 при одинаковых углах поворота и радиусах-векторах, поэтому лента 15 при движении не изменяет угла наклона относительно вертикальной оси весов (равного нулю), что позволяет произвести точный расчет профиля кулачков.
Зубчатый сектор кулачка 16 приводит в движение шестерню 17 и стрелку 21, которая на круговой шкале 23 указывает значение массы. Наличие кулачково-ленточного механизма компенсирует увеличение чувствительности весов с возрастанием нагрузки и позволяет получить равномерную круговую щкалу в результате точного расчета. Рычажный механизм 18 предназначен для компенсации осевого и радиального зазоров в зубчатом зацеплении (шестерня 17 - сектор 16). Воздущный демпфер 11 гасит колебаиия системы относительно положения равновесия. Перемещение траверсы 12 связано с шарнирными иараллелограммами 13 и поэтому имеет горизонтальную составляющую, величина которой связана функциональной зависимостью с углом поворота тяги параллелограмма. В интервале угла поворота тяги до 1° горизонтальное смещение составит до 0,02% от ее длины. При условии выполнения прямозубого зацепления указанное горизонтальное смещение не создаст помех для работы механизма.
При наклонах корпуса весов в плоскости движения квадраитов, благодаря расположению реек 5 и 6 виутри П-образной траверсы 12 и сходящимся траекториям квадрантов 1 и
2, изменения моментов двух квадрантов взаимно компенсируются, и система сохраняет равновесие. При наклонах в перпендикулярной плоскости вертикальные (относительно подвижной системы координат) составляющие веса груза и квадрантов уравновешиваются, а горизонтальные воспринимаются шарикоиодшипниками как осевые нагрузки. При вертикальных ускорениях сила давления груза на платформу и сумма сил противодавлеиия, зависящая от масс квадрантов, изменяются пропорционально изменению ускорения, и равновесие сохраняется. Ускорения, возникающие при качке в условиях иеспокойного моря, различны для различных точек судна
и благодаря тому, что ось 7 расположена выше оси 8, а сходящиеся траектории квадрантов 1 и 2 одновременно пересекаются в их среднем положении с вертикальной осью грузовой платформы 14, укрепленной в верхней
части П-образной траверсы 12, измеряемый и эталонный грузы размещены вблизи общей вертикальной линии, что гарантирует препебрежимо малые погрещности от ускорений, возникающих нри качке.
Формула изобретения
1. Квадрантные весы, содержащие два квадранта, грузоприемиый и кулачково-ленточный
механизм, отличающиеся тем, что, с целью обеспечения высокой точности взвешивания на судах в условиях качки, оси квадрантов расположены на разных высотах, а сами квадраиты связаны жесткой П-образной траверсой, в верхней части которой по оси симметрии расположена грузоприемная платформа, а виутренние стороны траверсы снабжепы зубчатыми рейками, входящими в зацеплепие с секторами, жестко связанными с рычагами квадрантов таким образом, что в среднем положении траектории движения грузов квадрантов пересекаются с вертикальной осью грузовой платформы, а кзлачковоленточный механизм содержит два кулачка,
имеющих одииаковые профили и расноложенных с разных сторон вертикальной ленты, причем убывание радиуса-вектора нижнего кулачка соответствует возрастаиию радиусавектора верхнего кулачка.
2. Весы поп. 1, отличающиеся тем, что П-образная траверса подвешена на шарнирных параллелограммах.
12
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы квадрантные | 1978 |
|
SU881533A1 |
| Весоизмерительное устройство | 1979 |
|
SU885816A1 |
| Рычажные весы | 1981 |
|
SU1015257A1 |
| Рычажные весы | 1979 |
|
SU832347A1 |
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Судовые весы | 1984 |
|
SU1204947A1 |
| Весы рычажные | 1976 |
|
SU570783A1 |
| Устройство для взвешивания в условиях качки | 1977 |
|
SU711370A1 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| Грузоподъемное устройство крана | 1986 |
|
SU1440858A1 |