(54) ШАГОВЫЙ КОНВЕЙЕР

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1982 |
|
SU1027111A1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Шаговый конвейер | 1977 |
|
SU747777A1 |
| Шаговый конвейер | 1977 |
|
SU707863A1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| ПОРЦИОННЫЙ РЕЗЧИК ТАБАЧНЫХ КИП | 1996 |
|
RU2102905C1 |
| Шаговый конвейер | 1980 |
|
SU967906A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Устройство для шлифования деталей круглого сечения из древесины | 1982 |
|
SU1054027A2 |
| ВЕРТИКАЛЬНЫЙ МЕХАНИЧЕСКИЙ ПРЕСС | 1991 |
|
RU2019416C1 |
1
Изобретение относится к устройствам для механизации транспортно-перегрузочных операций, а более конкретно- к конструкциям шаговых конвейеров.
Известны шаговые конвейеры, содержащие основание и грузонесущие балки с приводами вертикального и горизонтального .перемещения, причем одна группа балок совершает движение вверх-вниз, а другая вправо-влево 1 .
Недостаток данных конвейеров состоит в том, что в связи с наличием двух независимых приводов возникает необходимость согласования.циклов их работы во времени.
Наиболее близким техническим решением к предлагаемому является шаговый конвейер, содержащий основание, неподвижную и подвижную рамы и кривошипношатунный механизм, в котором шатуны щарнирно соединены с кривошипом и подвижной рамой, а кривошип связан с приводом . При работе транспортера подвижная рама, связанная с шатунами, совершает движение по эллиптической траектории, при этом большая ось эллипса соответствует шагу перекладки, а малая ось - половине высоты подъема изделий 2.
Недостаток этого конвейера состоит в том, что он не обеспечивает получения переменного шага конвейера, что сужает его технологические возможности. Однако в практике встречаются случаи, когда в процессе работы необходимо менять шаг конвейера. При этом следует выполнять монтажные работы, связанные с заменой кривошипа, что зачастую неудобно.. В случае частых переборок -растут потери времени, связанные с простоем оборудования.
Целью изобретения является расширение
0 технологических возможностей конвейера путем получения переменного шага конвейера.
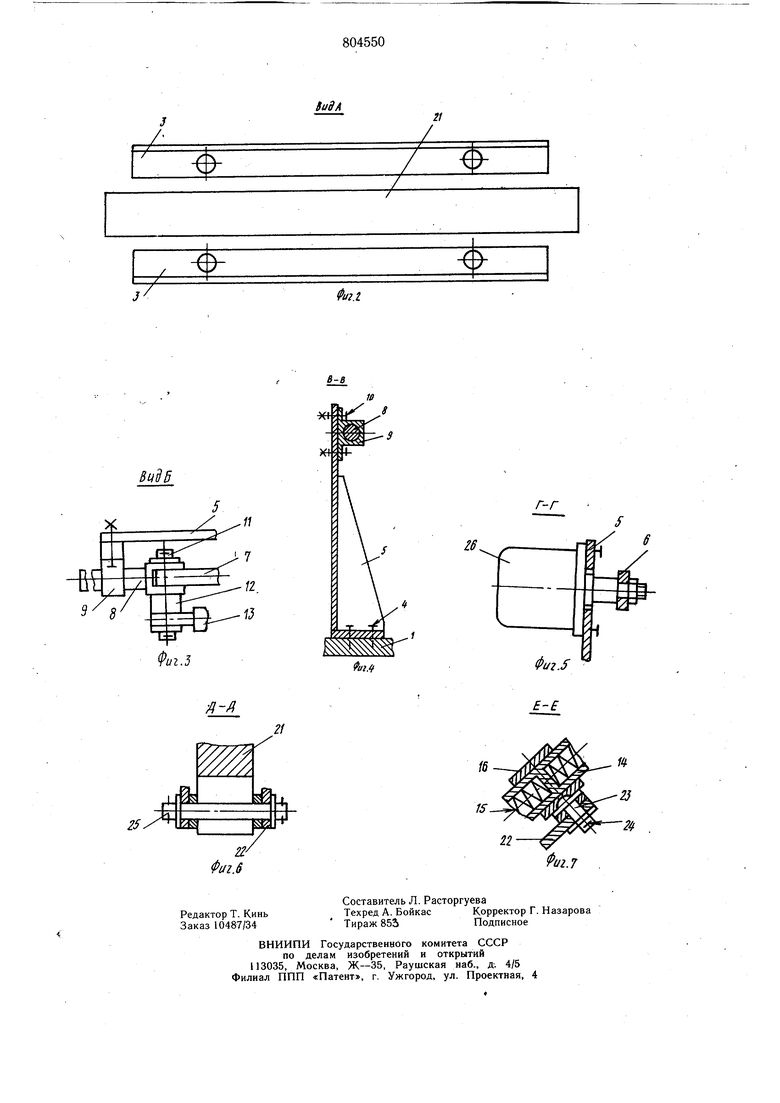
Указанная цель достигается тем, что конвейер снабжен дополнительным кривощип5но-шатунным механизмом, вертикальными и горизонтальными направляющими, закрепленными на основании посредством кронштейна, и ползунами, которые расположены в направляющих и шарнирно связаны с шатунами и между собой при помощи телескопической штанги, которая имеет втулку, установленную с возможностью перемещения вдоль нее, при этом подвижная рама выполнена с шарнирным параллелограммом. который шарнирно связан со втулками обоих кривошипно-шатунных механизмов, соединенными между собой посредством силового цилиндра. На фиг. 1 изображен конвейер, общий вид; на фиг. 2 - вид А иа фиг. 1, показаны грузонесущие рамы; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 1; на фиг. 7 - разрез Е-Е на фиг. 1. Шаговый конвейер, содержит основание 1 (фиг. 1), к которому с помощью штанг 2 крепятся неподвижные рамы 3. Кроме того, к основанию 1 болтами 4 крепятся два кронштейна -5, на каждом из которых устанавливается по одному кривошипно-шатунному механизму, состоящему из кривошипа 6, двух шатунов 7, шарнирно соединенных с кривошипом 6, и двух ползунов 8, расположенных в направляющих 9, скрепленных с кронштейном 5 болтами 10. Ползуны 8 расположены в направляющих 9 таким образом, что один из них направлен горизонтально, а другой вертикально. Соединение шатунов 7 с ползунами 8 шарнирное, выполнено с помощью осей 11. На оси 11 расположена также втулка 12 и телескопическая штанга, состоящая из скалки 13 и корпуса 14, подпружиненных пружинами 15. Эта штанга соединяет между собой шатуны 7. На корпусе 14 штанги с возможностью перемещения вдоль последней расположена втулка Ш. Втулки 16 двух кривошипно-щатунных механизмов связаны друг с другом силовым цилиндром. корпус 17 которого шарнирно соединен с одной из втулок 16, и шток 18 с другой. Штуцеры 19 и 20 предназначены для подачи рабочей среды ответственно в штоковую и поршневую полости. Подвижная рама 21 с помощью шарнирного параллелограмма, выполненного из звеньев 22, соединена с втулками 16,(фиг. 7), на которых для этого выполнены цапфы 23. Соединение стопорится шплинтами 24. Компенсация изменения расстояния между осями 25 верхнего и нижнего сочленения параллелограмма (фиг. 1) обеспечивается пазом, выполненным в нижней части подвижной рамы 21 (фиг. 6), а компенсация изменения расстояния между ползунами 8ч;жатием (растяжением) пружины 15. С каждым из кривошипов 6 жестко связан приводной двигатель 26 (фиг. 5), прикреплениый к кронштейну 5. Шаговый конвейер работает следуюшим образом. При вращении приводных двигателей 26 и скрепленных с ними кривошипов 6 движение передается шатунам 7 и шарнирно связанным с ними ползунам 8, которые находятся в направляющих 9 и поэтому соверщают возвратно-поступательное дви800 4 жение. Горизонтальный ползун 8 каждого кривошипно-шатунного механизма совершает движение вправо-влево с размахом, равным удвоенному радиусу кривошипа, а вертикальный ползун 8-вверх-вниз с тем же размахом. При этом оси 11 (фиг. 3), связанные как с шатунами 7, так и с ползунами 8, совершают также возвратно-поступательное движение. В связи с тем, что оси 11 одного кривошипио-шатунного механизма совершают возвратно-поступательное движение в двух взаимно перпендикулярных направлениях (вверх-вниз и вправо-влево), при шарнирном соединении этих осей телескопической штангой различные точки этой штанги будут описывать различные траектории. Те точки штанги, которые расположены ближе к верхней оси 11 (фиг. 1), будут описывать эллипс с большой осью, расположенной горизонтально; точки штанги, находящиеся ближе к нижней оси 11 (фиг. 1), будут описывать эллипс с большой осью, расположенной вертикально, а точка, расположенная посередине штанги, будет описывать окружность. При этом ось щайбы 23 (фиг. 7), если она находится в положении, соответствующем фиг. 1 (посередине штанги), будет также описывать окружность, а шаг конвейера будет равен радиусу кривошипа 6. При необходимости увеличить шаг кон- пс.и.иА«™...„ ...„.„.о ша. .. корпуса Гси , . TySca 16по телескопической штанги вверх, « траекторией цапфы 23 будет эллипс с большой осью, превышаюц еи диаметр окружности, соответствующей среднему положению цапфы 23. Для уменьшения шага давление рабочей среды должно быть подано к штуцеру 19 силового цилиндра, в этом случае втулка 16 сдвинется вниз, а цапфа 23 будет описывать эллипс, малая ось которого будет меньше диаметра исходной круговой траектории (фиг. 1). Для предупреждения смещения скалки 13 относительно корпуса 14 штанги необходимо, чтобы усилие пружин 15 превышало силу трения, возникающую при движении втулок 16 относительно корпуса 14 штанги. С цапфами 23 связаны звенья 22 шарнирного параллелограмма, поэтому подвижная рама 21 будет совершать движение. соответствующее движению цапф 23. При перемещении втулок 16 вверх или вниз по корпусам 14 штанг за счет увеличения или уменьшения расстояния между цапфами 23 оси 25 (фиг. 6) будут сближаться или удаляться. Это дает возможность стабилизировать уровень подвижной рамьГ 21. Таким образом, описанная конструкция обеспечивает достаточно широкий диапазон дистанционной регулировки шага транспортера без остановки приводных двигателей 26 при относительной стабилизации положения подвижной рамы 21. Конвейеры с изменяемым шагом целесообразно применять в тех случаях, когда по технологической линии, составной частью которой является шаговый конвейер, периодически пропускаются партии изделий разных габаритов; в этом случае обеспечивает ся более рациональное использование оборудования и ликвидируются потери времени на его переналадку. Формула изобретения Шаговый конвейер, содержащий основание, неподвижную и подвижную рамы и кривошипно-шатунный механизм, в котором шатуны шарнирно соединены с кривошипом и подвижной рамой, а кривошип свяКу
.t зан с приводом, отличающийся тем, что, с целью расширения технологических возможностей конвейера путем получения переменного шага конвейера, он снабжен дополнительным кривошипно-шатунным механизмом, вертикальными и горизонтальными направляющими, закрепленными на основании посредством кронштейна, и ползунами, которые расположены в направляющих и ша нирно связаны с шатунами и между собой при помощи телескопической штанги. которая имеет втулку, установленную с возможностью перемещения вдоль нее, при этом подвижная рама выполнена с шарнирным параллелограммом, который шарнирно связан со втулками обоих кривошипно-шатунных механизмов, соединенными между собой посредством силового цилиндра. Источники информации, принятые во внимание при экспертизе 1.Вейсман В. Ф. Шагающие конвейеры. М., «Мащиностроение, 1976, с. 20. 2.Авторское свидетельство СССР по завке № 2527345/29-03, кл. В 65 G 25/00, 1977 (прототип).
г/
Фиг.г
