(54) ШАГОВЫЙ КОНВЕЙЕР

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Установка для расфасовки сыпучих продуктов в барабаны | 1986 |
|
SU1414709A1 |
| Устройство дл ориентированной укладки в тару кольцеобразных предметов | 1988 |
|
SU1555191A2 |
| Шаговый конвейер | 1977 |
|
SU747777A1 |
| Инерционный конвейер | 1983 |
|
SU1154169A1 |
| Толкатель для загрузки печи | 1977 |
|
SU737760A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Инерционный конвейер | 1987 |
|
SU1459982A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СБОРКИ СТРЕЛОЧНОГО ПЕРЕВОДА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2451125C1 |
| Устройство для уборки шпал с железнодорожного пути | 1981 |
|
SU1041612A1 |

1
Изобретение относится к подъемно-транспортному машиностроению, а именно к конструкции шагового конвейера, предназначенного для транспортировки частично укомплектованной в тарелках пииш, одновременно к двум линиям окончательной комплектовки в столовых массового питания.
Известен шаговый конвейер, содержаший ; подвижную раму-штангу с жестко закрепленными упорами-толкателями, привод возвратно-поступательного движения и стрелочные переводы 1.
Конструкция данного конвейера может осуществлять шаговое перемещение штучных предметов, но съем их может быть произведен только в конце конвейера.
Наиболее близким к изобретению техническим решением является шаговый Конвейер, содержащий раму с направляющими, в которых установлены подвижные органы с толкателями, установленными на осях, и штангу« связанную с приводом возвратно-поступательного перемещения и подвиншыми органами. Этот конвейер обеспечивает возможность
СНЯТИЯ транспортируемых штучных предметов в различных местах конвейера н заполнения освободившихся мест на конвейере 2Ь
Однако у известного конвейера весьма сложная кинематика взаимодействия транспортируемых предметов, щупов, кулачков, упоров и тяг, что снижает надежность работы конструкции. При этом конвейер непригоден для транспортировки тарелок и другой открытой посуды с жидкостью ввиду того, что его привод не обеспечивает плавного увеличення и уменьшения скорости во времени перемещения предметов на шаг, а механизм, перемещающнй предметы, находится непосредственно под предметами, сверху полностью открыт и не защищен от попадания посторонних предметов..
Конвейер имеет большую высоту, и щупы, кулачки, упоры и тяги расположены и работают в вертикальной плоскости.
Целью изобретения является повышение надежности конвейера, а также уменьшение габарита конвейера по высоте.
39679064
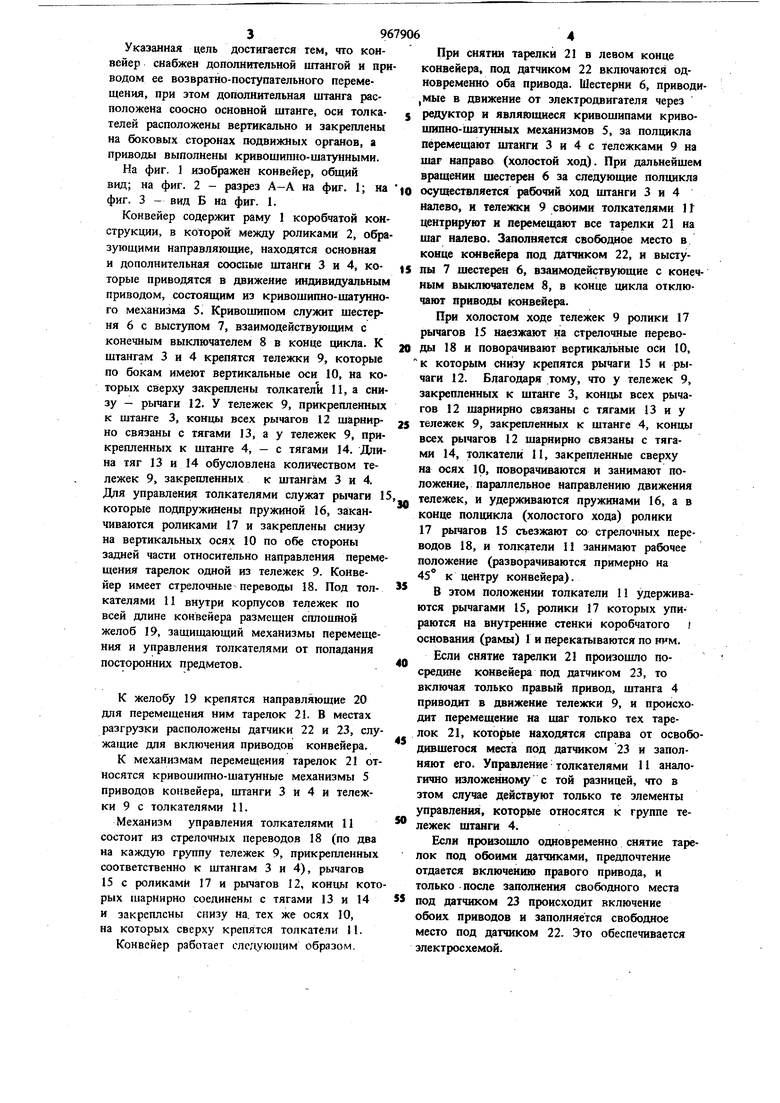
Указанная цель достигается тем, что кон-При снятии тарелки 21 в левом конце
вейер снабжен дополнительной штангой и при- конвейера, под датчиком 22 включаются одводом ее возвратно-поступательного перемещения, при этом дополнительная штанга расположена соосно основной штанге, оси толкателей расположены вертикально и закреплены на боковых сторонах подвижных органов, а приводы выполнены кривошипно-шатуниыми. На фиг. 1 изображен конвейер, общий на фиг. 2 - разрез А-А на фиг. 1; на вид; фиг. 3 - вид Б на фиг. 1. Конвейер содержит раму 1 коробчатой конструкции, в которой между роликами 2, обра зующими направляющие, находятся основная и дополнительная соосные штанги 3 и 4, которые приводятся в движение индивидуальным приводом, состоящим из кривошипно-шатунного механизма 5. Кривошипом служит шестерня 6 с выступом 7, взаимодействующим с конечным выключателем 8 в конце цикла. К штш{гам 3 и 4 крепятся тележки 9, которые по бокам имеют вертикальные оси 10, на которых сверху закреплены толкател II, а снизу - рьгааги 12. У тележек 9, прикреплеиных к штанге 3, концы всех рычагов 12 шарнирно связаны с тягами 13, а у тележек 9, прикрепленных к штанге 4, - с тягами 14. Длина тяг 13 и 14 обусловлена количеством тележек 9, закрепленных к штангам 3 и 4. Для управления толкателями служат рычаги 1 которые подпружинены пружиной 16, за канчиваются роликами 17 и закреплены снизу на вертикальных осях 10 по обе стороны задней части относительно направления переме щения тарелок одной из тележек 9. Конвейер имеет стрелочные переводы 18. Под толкателями 11 внутри корпусов тележек по всей длине конвейера размещен сплошной желоб 19, защищающий механизмы перемещения и управления толкателями от попадания посторонних предметов. К желобу 19 крепятся направляющие 20 для перемещения ним тарелок 21. В местах разгрузки расположены датчики 22 и 23, служащие для включения приводов конвейера. К механизмам перемещения тарелок 21 относятся кривошипно-шатунные механизмы 5 приводов конвейера, штанги 3 и 4 и тележки 9 с толкателями 11. Механизм управления толкателями 11 состоит из стрелочных переводов 18 (по два на каждую группу тележек 9, прикрепленных соответственно к штангам 3 и 4), рычагов 15 с роликами 17 и рычагов 12, концы кото рых щарнирно соединены с тягами 13 и 14 и закреплены снизу на. тех же осях 10, на которых сверху крепятся толкатели И. Конвейер работает следующим образом. повременно оба привода. Шестерни 6, приводи,мые в движение от электродвигателя через редуктор и являющиеся кривошипами кривошипно-шатунных механизмов 5, за полцикла перемещают штанги 3 и 4 с тележками 9 на шаг направо (холостой ход). При дальнейшем вращении шестерен 6 за следующие полцикла осуществляется рабочий ход штанги 3 и 4 налево, и тележки 9 своими толкателями 11 центрируют н перемещают все тарелки 21 на шаг налево. Заполняется свободное место в. конце ксжвейера под датчиком 22, и выступы 7 шестеро 6, взаимодействующие с конечным выключателем 8, в конце цикла отключают приводы конвейера. При холостом ходе тележек 9 ролики 17 рычагов 15 наезжают на стрелочные переводы 18 и поворачивают вертикальные оси 10, к которым снизу крепятся рычаги 15 и рычаги 12. Благодаря тому, что у тележек 9, закрепленных к штанге 3, концы всех рычагов 12 шарнирно связаны с тягами 13 и у тележек 9, закрепленных к штанге 4, концы всех рычагов 12 шарнирно связаны с тягами 14, толкатели 11, закрепленные сверху на осях 10, поворачиваются и занимают положение, параллельное направлению движения тележек, и удерживаются пружинами 16, а в конце полцикла (холостого хода) ролики 17 рычагов 15 съезжают со стрелочных переводов 18, и толкатели 11 занимают рабочее положение (разворачиваются примерно на 45 к центру конвейера). В зтом положении толкатели 11 удерживаются рычагами 15, ролики 17 которых упираются на внутренние стенки коробчатого основания (рамы) Г и перекатываются по ним. Если снятие тарелки 21 произошло посредине конвейера под датчиком 23, то включая только правый привод, штанга 4 приводит в движение тележки 9, и происходит перемещение на щаг только тех тарелок 21, которые находятся справа от освободивщегося места под датчиком 23 и заполняют его. Управление толкателями 11 аналогично изложенному с той разницей, что в зтом случае действуют только те элементы управления, KOTopi ie относятся к группе тележек штанги 4. Если произошло одновременно снятие тарепок под обоими датчиками, предпочтение отдается включению правого привода, и только после заполнения свободного места под датчиком 23 происходит включение обоих приводов и заполняется свободное место под датчиком 22. Это обеспечивается злектросхемой.
Положительный эффект шагового конвейе-. ра достигается за счет того, что увеличивается надежность конструкдий благодаря применению отдельных приводов для каждой штанги с группой тележек и отказа от сложной системы кулачков, упоров, тяг, щупов. При этом обеспечивается плавное увеличение и уменьшение скорости во время перемещения тарелок благодаря использованию в качестве . iприводов кривошипно-шатунных механизмов.
Исключается возможность попадания посторонних предметов на механизмы конвейера и обеспечивается удобство уборки, благодаря применению сплошного желоба, длина которого определяется длиной конвейера за счет размещения желоба внутри тележек, вертикальных осей толкателя - по краям тележек, а элементов управления толкателями - по обе стороны конвейера в гори. зонтальной плоскости.
Формула изобретения Шаговый конвейер, содержащий раму с направляющими, в которых установлены подвижные органы с толкателями, закрепленными на осях, и штангу, связанную с приводом возвратно-поступательного перемещения и подвижными органами, отличающийся тем, что, с целью повышения надежности в работе и уменьшения габаритов по высоте, конвейер снабжен дополнительной штангой и. приводом ее возвратнопоступательного перемешения, при этом дополнительная штанга расположена соосно основной штанге, оси толкателей расположены вертикально и закреплены на боковых сторонах подвижных органов, а приводы выполнены крнвошипно-шатуннымн.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 492435, кл. В 65 G 25/04, 1974.
п
17
10
