1
Изобретение относится к машиностроению и может быть использовано в устройствах для преобразования вращательного движения в прерывисто поступательное по сложной замкнутой траектории на плоскости,
Известен рычажн1а й механизм с гибким звеном, содержащий корпус,установленные на нем одинакового радиуса шкивы, охватываемые гибким звеном, жестко закрепленный на гибком звене поводок, длина которого равна радиусу шкивов, ролик установленный на свободном конце поводка, и соединяющую оси.вращения шкивов направляющую, выполненную в корпусе и взаимодействуиицую с концом поводка посредством ролика 1,
Недостатком этого механизма является относительно невысокие функциональные возможности, вследствие конструктивных особенностей.
Цель изобретения - расширение функциональных возможностей.
Указанная цель достигается тем, что механизм снабжен кулисой, шарнирно закрепленной на оси ролика, дополнительным жестко закрепленным на гибком звене поводком, длина кр второго равна радиусу шкивов, дополнительным роликом, установленным на свободном конце дополнительного поводка, и |Ползуном, установленным на оси ролика и взаимодействующим с пазом кулисы.
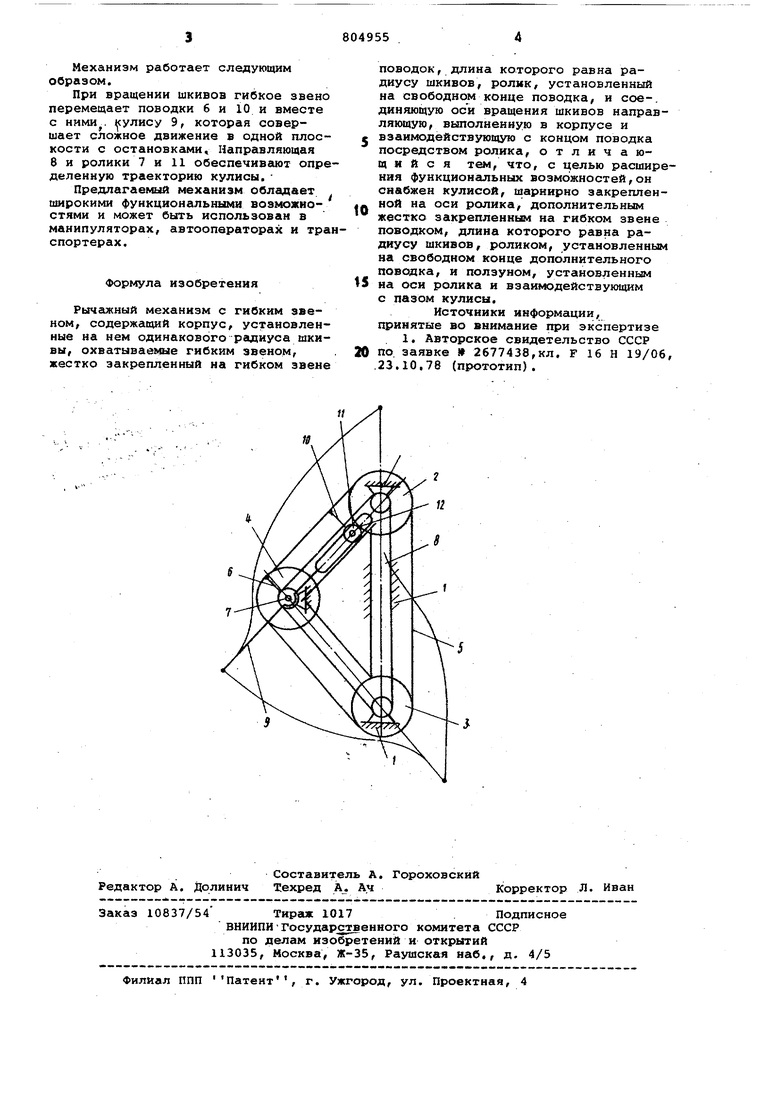
lia чертеже изображена кинематическая схема механизма.
Механизм содержит корпус 1, уста-
0 новленные на нем одинакового радиуса шкивы 2, 3 и 4, охватывающие их гибкое звено 5, жестко закрепленный на гибком звене поводок 6,длина которого равна радиусу шкивов,ролик 7,
5 установленный на свободном конце поводка, и соединяющую оси вращения шкивов направляквдую 8,. выполненную в корпусе 1 и взаимодействующую с концом поводка посредством ролика
0 7, Механизм снабжен кулисой 9, шарнирно закрепленной на оси ролика 7, дополнительным жестко закрепленным на гибком звене 5 поводком 10, длина которого равна радиусу шкивов
5 2, 3 и 4, дополнительным роликом 11, установленным на свободном конце дополнительного поводка 10, и ползуном 12, жестко установленным на оси ролика 7 и взаимодействукшшм
0 С пазом кулисы 9.
Механизм работает следующим оеразом.
При вращении шкивов гибкое звено перемещает поводки 6 и 10 и вместе с ними. улису 9, которая совершает сложное движение в одной плоскости с ocTaHOBKauviH, Направляющая 8 и ролики 7 и 11 обеспечивают определенную траекторию кулисы.
Предлагаемый механизм обладает широкими функциональными возможностями к может быть использован в манипуляторах, автооператорах и транспортерах.
Формула изобретения
Рычажный механизм с гибким звеном, содержащий корпус, установленные на нем одинакового радиуса шкивы, охватываемые гибким звеном, жестко закрепленный на гибком звене
поводок, длина которого равна радиусу шкивов, ролик, установленный на свободном конце поводка, и сое-, диняющую оси вращения шкивов направляющую, выполненную в корпусе и взаимодействующую с концом поводка посредством ролика, отличающийся тем, что, с целью расширения фуНКЦИОНёШЬНЫХ ВОЗМОЖНОСТеЙ , ОН
снабжен кулисой, шарнирно закрепленной на оси ролика/ дополнительным жестко закрепленным на гибком звене поводком, длина которого равна радиусу шкивов, роликом, установленным на свободном конце дополнительного повсщка, и ползуном, установленным иа оси ролика и взаиьюдействующим с пазом кулисы.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР 0 по. заявке 2677438,кл. F 16 Н 19/06, .23.10.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулино-рычажный механизм в.п.саблинаС гибКиМ зВЕНОМ | 1979 |
|
SU808740A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| "Рычажный механизм в.п.саблина с гибкимзВЕНОМ | 1979 |
|
SU848819A1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1994 |
|
RU2082602C1 |
| Устройство для обработки оптических деталей | 1990 |
|
SU1816659A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Аппарат для перемешивания сыпучих и вязких материалов | 1978 |
|
SU768447A1 |
| Экстрактор | 1985 |
|
SU1369744A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Швейная машина зигзаг | 1981 |
|
SU1089187A1 |
w
12
