занная с ползуном 5 каретка 3 несет захваты 33, а также механизмы их перемещения относительно каретки и синхронного перезажима. Каретка 3 установлена с возможностью совместного с ползуном 5 межнозинионного перемещения, а захваты 33 подвижны относительно каретки в направлении, перпендикулярном ее перемеп1е- нию. Кинематическая связь между ползуном и ка)егк()11 выполнена в виде ви,1ь- чатого криво1нипно-кулисного механизма, на кривошипе 16 которого закреплен ре- версивно поворотный кулачковый вал 15. Последний кинематически связан с механи.з- мом перемещения захватов, при ме1
Изобретение относится к ма1пинострое- нию, в частности к промьинленным роботам и может быть использовано в различных областях народного хозяйства, например в часовой 11|1омы нленности при автоматизации загрузки заготовок корпусов наручных ча- сов на обработку
изобретения повышение наде/к- ности работы за счет обеспечения возмож ности осуществления функциона;1Ы1Ых перемещений кинематических звеньев ман|{пуля- тора от единого привода.
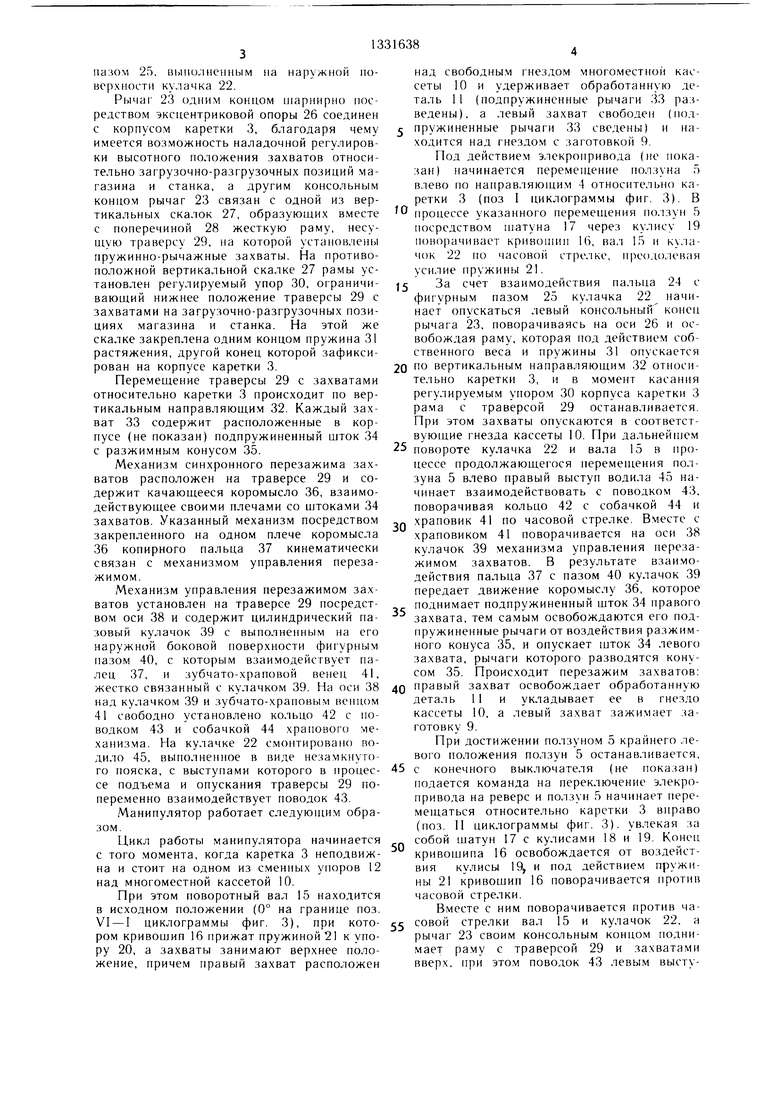
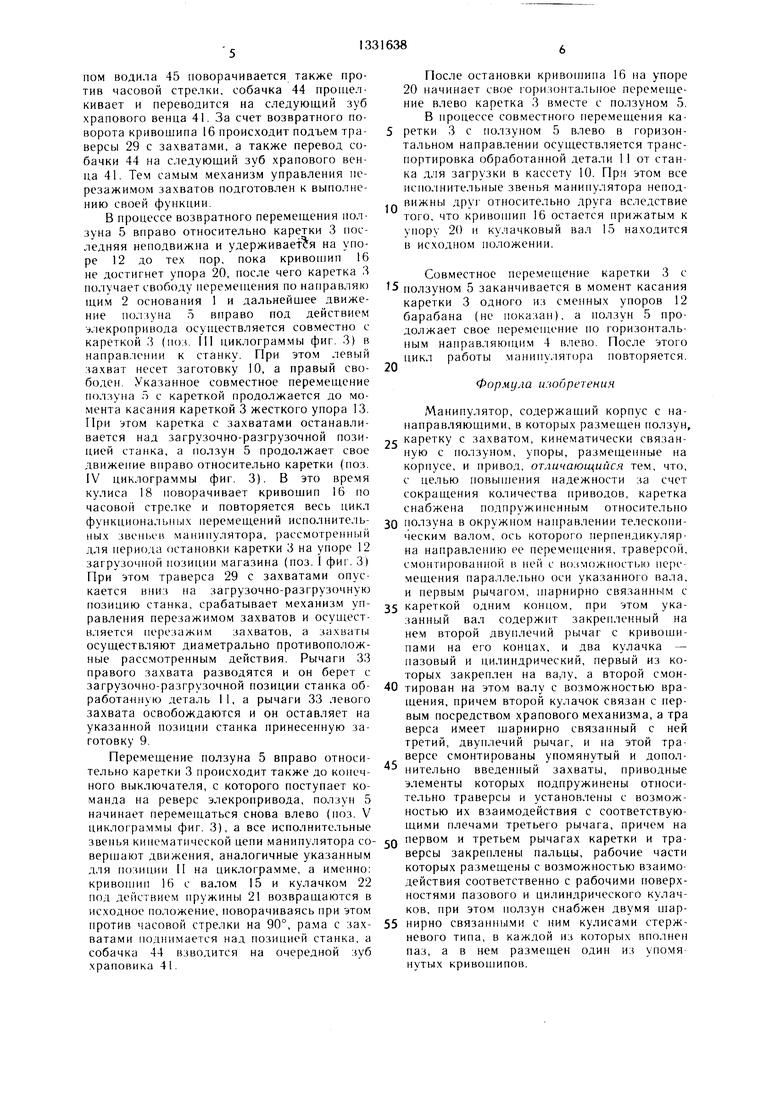
На фиг. 1 изображена кинематическая схема манипулятора в исходном положении поворотного кулачкового вала каретки; па фиг. 2 - соединение ползуна с iijoKpo- нриводом; на фиг. 3 - циклограмма работы манипулятора, причем сплошными стрелками ноказаны межнозиционные перемещения каретки совместно с ползуном, а пунктирными стрелками - перемещения ползуна относительно каретки и поворот кривошипа совместно с валом каретки.
Манипулятор смонтирован на основании 1 с горизонтальными направляющими 2, на которых установлена каретка 3 с возможностью прямолинейного возвратно-поступательного межпозиционного перемещения под действием расположенного на горизо})- тальных направляюп1их 4 ползуна 5, связанного с реверсивным элекроприводом (не показан) посредством замкнутого гибкого элемента.
Гибкий элемент привода выполнен из двух соединенных между собой разно- родных частей: плоскозубого ремня 6, длина которого определяется величиной перемещения ползуна 5, и капронового троса 7. Движение гибкому элементу передается от редуктора реверсивного элекроприханизм синхронного перезажима захватов 33 связан с механизмом их переме- П1ения посредством кинематической нары, содержащей водило, смонтированное на указанном кулачковом валу, и новодок, связанный через храповый механизм с установленным соосно и телескопически кулачковому валу цилиндрическим пазовым кулачком 39 механизма управления перезажимом захватов. Кроме тог о, гибкий элемент привода ползуна выполнен в виде двух разнородных частей: плоскозубого ремня 6 и капронового троса 7, что позволяет увеличить зопу обслуживания. 3 ил.
вода (пе показан) через взаимодействую- Н1ИЙ с пл()ско:(убым ремнем Ct зубчатый шкив 8.
Межгюзиционнь 1е перемепд пия каретки 3 О1 раничиваются у мага:и1на :uirpy3O4HOi(j устройства (не показаны), где происходит взятие заготовки 9 из мног оместной кассеты 10 и укладка в свободное гнездо кассеты обработанной детали 11. установленными на новоротном барабане (не показан) сменными упорами 12. а также у станка в момент установки за1Ч)Т()вки 9 на загрузочно-разгрузочнук) позицию станка и съема с него обработанной детали жестким угюро.м 13, расположенным на основании станки.
В направляющих втулках 14 каретки ,} установ,1ен с возможностью 1И)В())ота вал 15. кинематически связанный с по и ном 5 за- дпюцц I) манипуля гора.
Кинемагическая связь 110, о с кареткой 3 выполнена в виде вильчатого кри- вон1ипно-кулисного мехапи:5Ма, С()1-тоя1цего из закрепленного на телескопическом валу 15 кривошипа 16 и двух симметрично установленных относительно ползуна 5 и щар- нирно соединенных с ним шатунов 17. Кривоц ип 16 и шатуны 17 связаны между собой посредством двух кулис 18 и 19.
Исходное ноложение кривошипа 16 (0° на ноз. 111 и VI фиг. 3) фиксируется закрепленными на каретке 3 жестким упором 20 и возвратной пружиной 21 (фиг. 1).
На валу 15 закреплен цилиндрический пазовый кулачок 22 механизма перемещения захватов относительно каретки 3. Указанный механизм содержит также рычаг 23 с пальцем 24, взаимодействующим с профильным
на наружнои попазом 25, выполненным всрхности кулачка 22.
Рычаг 23 одним концом шарнирно посредством эксцентриковой опоры 26 соединен с корпусом каретки 3, благодаря чему имеется возможность наладочной регулировки высотного положения захватов относительно загрузочно-разгрузочных позиций магазина и станка, а другим консольным концом рычаг 23 связан с одной из вертикальных скалок 27, образуюпдих вместе с поперечиной 28 жесткую раму, несущую траверсу 29, на которой установлены пружинно-рычажные захваты. На противоположной вертикальной скалке 27 рамы установлен регулируемый упор 30, ограничивающий нижнее положение траверсы 29 с захватами на загрузочно-разгрузочных позициях магазина и станка. На этой же скалке закреплена одним концом пружина 31 растяжения, другой конец которой зафиксирован на корпусе каретки 3.
Перемещение траверсы 29 с захватами относительно каретки 3 происходит по вертикальным направляющим 32. Каждый захват 33 содержит расположенные в корпусе (не показан) подпружиненный щток 34 с разжимным конусом 35.
Механизм синхронного перезажима захватов расположен на траверсе 29 и содержит качающееся коромысло 36, взаимодействующее своими плечами со щтоками 34 захватов. Указаннь й механизм посредством закрепленного на одном плече коромысла 36 копирного пальца 37 кинематически связан с механизмом управления перезажимом.
Механизм управления перезажимом захватов установлен на траверсе 29 посредством оси 38 и содержит цилиндрический пазовый кулачок 39 с выполненным на его наружной боковой поверхности фигурным пазом 40, с которым взаимодействует палец 37, и зубчато-храповой венец 41, жестко связанный с кулачком 39. На оси 38 над кулачком 39 и зубчато-храповым венцом 41 свободно установлено кольцо 42 с поводком 43 и собачкой 44 храпового механизма. На кулачке 22 смонтировано водило 45, выполнешюе в виде незамкнутого пояска, с выступами которого в процессе подъема и опускания траверсы 29 попеременно взаимодействует поводок 43.
Манипулятор работает следующим образом.
Цикл работы манипулятора начинается с того момента, когда каретка 3 неподвижна и стоит на одном из сменных упоров 12 над многоместной кассетой 10.
При этом поворотный вал 15 находится в исходном положении (0° на границе поз. VI - I циклограммы фиг. 3), при котором кривощип 16 прижат пружиной 21 к упору 20, а захваты занимают верхнее положение, причем правый захват расположен
10
15
0
5
0
5
0
5
0
5
над свободным гнездом многоместной кассеты 10 и удерживает обработанную деталь 11 (подпружиненные рычаги 33 разведены), а левый захват свободен (подпружиненные рычаги 33 сведены) и находится над гнездом с заготовкой 9.
Под действием элекронривода (не показан) начинается перемещение ползуна 5 влево по направляющим 4 относительно каретки 3 (поз I циклограммы фиг. 3). В процессе указанного перемещения по. 1зун 5 посредством шатуна 17 через кулису 19 поворачивает криво1пип 16, вал 15 и кулачок 22 по часовой стрелке, преодолевая усилие пружины 21.
За счет взаимодействия пальца 24 с фигурным пазом 25 кулачка 22 начинает опускаться левый консольный конец рычага 23, поворачиваясь на оси 26 и освобождая раму, которая под действием собственного веса и пружины 31 опускается по вертикальным направляющим 32 относительно каретки 3, и в момент касания регулируемым упором 30 корпуса каретки 3 рама с траверсой 29 останавливается. При этом захваты опускаются в соответствующие гнезда кассеты 10. При дальней|ием повороте кулачка 22 и вала 15 в процессе продолжающегося перемещения ползуна 5 влево правый выступ водила 45 начинает взаимодействовать с поводком 43, поворачивая кольцо 42 с собачкой 44 и храповик 41 по часовой стрелке. Вместе с храповиком 41 поворачивается на оси 38 кулачок 39 механизма управления перезажимом захватов. В результате взаимодействия пальца 37 с пазом 40 кулачок 39 передает движение коромыслу 36, которое поднимает подпружиненный щток 34 правого захвата, тем самым освобождаются его подпружиненные рычаги от воздействия разжимного конуса 35, и опускает щток 34 левого захвата, рычаги которого разводятся конусом 35. Происходит перезажим захватов: правый захват освобождает обработанную деталь 11 и укладывает ее в гнездо кассеты 10, а левый захват зажимает заготовку 9.
При достижении ползуном 5 крайнего левого положения ползун 5 останавливается, с конечного выключателя (не показан) подается команда на переключение элекро- привода на реверс и ползун 5 начинает перемещаться относительно каретки 3 вправо (поз. II циклограммы фиг. 3). увлекая за собой щатун 17 с кулисами 18 и 19. Конец кривощипа 16 освобождается от воздействия кулисы 19, и под действием пружины 21 кривощип 16 поворачивается против часовой стрелки.
Вместе с ним поворачивается против часовой стрелки вал 15 и кулачок 22, а рычаг 23 своим консольным концом поднимает раму с траверсой 29 и захватами вверх, при этом поводок 43 левым выступом водила 45 поворачивается также против часовой стрелки, собачка 44 прошел- кивает и переводится на следующий зуб храпового венца 41. За счет возвратного поворота кривошипа 16 происходит подъем траверсы 29 с захватами, а также перевод собачки 44 на следующий зуб храпового венца 41. Тем самым механизм управления перезажимом захватов подготовлен к выполнению своей функции.
В процессе возвратного перемещения ползуна 5 вправо относительно каретки 3 последняя неподвижна и удерживается на упоре 12 до тех пор, пока кpивoцJип 16 не достигнет упора 20, после чего каретка ,Ч по.чучает свободу перемещения по направляю щим 2 основания 1 и дальнейщее движение ползуна 5 вправо под действием лекропривода осуществляется совместно с кареткой 3 (поз. III циклограммы фиг. 3) в направлении к станку. При этом левый захват несет заготовку 10, а правый свободен. Указанное совместное перемещение ползуна 5 с кареткой продолжается до момента касания кареткой 3 жесткого упора 13. При утом каретка с захватами останавливается над загрузочно-разгрузочной позицией станка, а ползун 5 продолжает свое движение вправо относительно каретки (поз. IV циклограммы фиг. 3). В это время кулиса 18 поворачивает кривошип 16 по часовой стрелке и повторяется весь цикл функциона:1ьн1 1х церемещений исполните.чь- ных манипулятора, рассмотренрП)1Й для периода остановки каретки 3 на упоре 12 загрузочной позиции магазина (поз.I фиг. 3| При этом траверса 29 с захватами опускается вниз на загрузочно-разгрузочную позицию станка, срабатывает механизм управления перезажимом захватов и осуществляется нерезажим захватов, а захваты осуществляют диаметрально противоположные рассмотренным действия. Рычаги 33 правого захвата разводятся и он берет с загрузочно-разгрузочной позиции станка обработанную деталь 11, а рычаги 33 левого захвата освобождаются и он оставляет на указанной позиции станка принесенную заготовку 9.
Перемещение ползуна 5 вправо относительно каретки 3 происходит также до конечного выключателя, с которого поступает команда на реверс элекропривода, ползун 5 начинает перемещаться снова влево (поз. V циклограммы фиг. 3), а все испо.тнительные звенья кинематической цепи манипулятора совершают движения, аналогичные указанным для позиции II на циклограмме, а именно: кривошип 16 с валом 15 и кулачком 22 под действием нружины 21 возвращаются в исходное положение, поворачиваясь при этом против часовой стрелки на 90°, рама с захватами поднимается над позицией станка, а собачка 44 взводится на очередной зуб храповика 41.
После остановки кривоп ипа 16 на упоре 20 начинает свое горизонтальное перемещение влево каретка 3 вместе с ползуном 5. В процессе совместного перемещения каретки 3 с ползуном 5 влево в горизонтальном направлении осуществляется транспортировка обработанной детали 11 от станка для загрузки в кассету 10. При этом все ис кх 1нительные звенья манинулятора негюдвижны друг относительно друга вследствие того, что кривошип 16 остается прижатым к упору 20 и кулачковый вал 15 находится в исходном положении.
Совместное перемещение каретки 3 с ползуном 5 заканчивается в момент касания каретки 3 одного из сменных упоров 12 барабана (не показан), а нолзун 5 продолжает свое перемещение по горизонтальным нанравляю1цим 4 влево. После этого цикл работы манипулятора повторяется.
Формула изобретения
Манипулятор, содержащий корпус с на- направляющими, в которых размещен ползун,
каретку с захватом, кинематически связанную с нолзуном, упоры, размещенные на корпусе, и привод, отличающийся тем, что, с целью повьппения надежности за счет сокращения количества приводов, каретка снабжена подпружиненным относительно
0 ползуна в окружном направлении телескопическим валом, ось которого перпендикулярна направлению ее перемещения, траверсой, смонтированной в ней с возможностью iiejie- мещения паралле:1ьно оси указанного вала, и первым рычагом, шарнирно связанным с
5 кареткой одним конпо.м, при этом указанный вал содержит закрепленный на нем второй двуплечий рычаг с кривошипами на его концах, и два кулачка - пазовый и цилиндрический, первый из которых закреплен на валу, а второй смон0 тирован на этом валу с возможностью вращения, причем второй кулачок связан с первым посредством храпового механизма, а тра верса имеет шарнирно связанный с ней третий, двунлечий рычаг, и на этой траверсе смонтированы упомянутый и допол- пительно введенный захваты, приводные элементы которых подпружинены относительно траверсы и установлены с возможностью их взаимодействия с соответствующими плечами третьего рычага, причем на
Q первом и третьем рычагах каретки и траверсы закреплены пальцы, рабочие части которых размещены с возможностью взаимодействия соответственно с рабочими поверхностями пазового и цилиндрического кулачков, при этом ползун снабжен двумя njap5 нирно связанными с ним кулисами стержневого типа, в каждой из которых вполнен паз, а в нем размещен один из упомянутых криво1иипов.
( }l}
О
fpua. 2
30
Ж
фиг.З
О
90
Ж
Ж
0° 90
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1991 |
|
SU1813620A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ СБОРКИ И НАСТРОЙКИ КОЛЕБАТЕЛЬНЫХ КОНТУРОВ | 1965 |
|
SU175090A1 |
| Устройство для сборки проволочных контактов | 1988 |
|
SU1554040A1 |
| Механизм привода каретки плосковязальной машины | 1990 |
|
SU1730266A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Станок для печатания фабричной марки, например, на меховых шкурках | 1957 |
|
SU114174A1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| Привод каретки плосковязальной машины | 1990 |
|
SU1805149A1 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
Изобретение относится к области ма- и1иностроения, в частности к промьинлен- ным работам преимущественно для автоматизации процессов в часовой промышленности. Цель изобретения - повышение надежности за счет сокращения количества приводов. Ползун 5 установлен с возможностью возвратно-поступательного перемещения от привода посредством замкнутого гибкого элемента. Кинематически свяS (Л
| Автооператор | 1982 |
|
SU1033288A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
