I
Изобретение относится к машинотстроению ri может быть использовано в устройствах для преобразования вращательного движения в поступательное по замкнутой траектории с выстоем ведомого звена.
Известен рычажный механизм с гибким звеном, содержащий, по крайней мере, два колеса равного радиуса, охватывающее их гибкое звено и закрепленный на нем по нормали со стороил расположения колес поводок, длина которого равна радиусу колеса D3 .
Недостатком этого механизма является невысокая надежность .вследствие недостаточной фиксации положения поводка по нормали относительно гибкого звена.
Цель изобретения повьшение надежности работы.
Указанная цель достигается тем, что поводок снабжен жестко связанным с ним дополнительным плечом, размещенным с противоположной стороны расположения колес, а механизм - рычагом, шарнирно связанным одним концом с гибким звеном, а другим - со свободным концом дополнительного плеча, длина гибкого звена между точками крепления рычага и поводка не больше длины дуги охвата колеса гибким звеном, а ось шарнира крепления рычага с дополнительным плечом расположена на перпендикуляре, проведеннЬм к середине прямой, соединяющей ось шарнира крепления рычага к гибкому звену при прохождении поводка в крайней точке дуги охвата с точкой, лежащей на продолжении касательной к колесам параллельной линии, соединяющей центры колес, на расстоянии, равном длине дуги между точками крепления рычага и поводка на гибком звене.
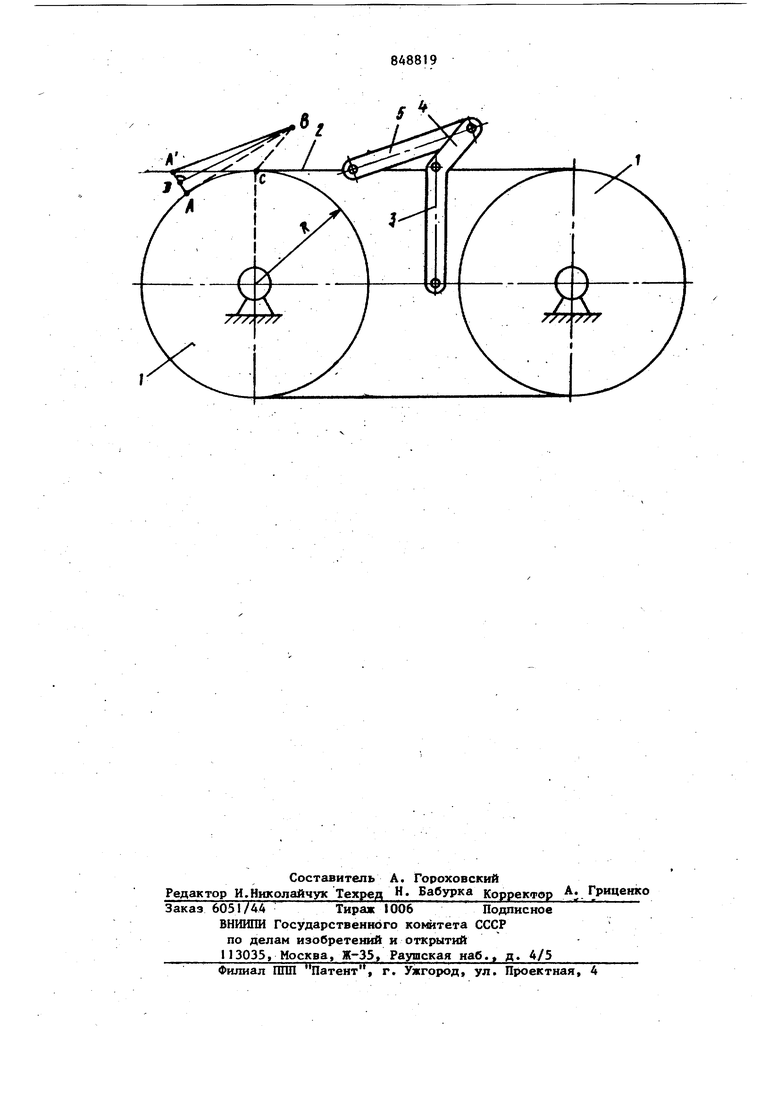
На чертеже изображена кинематичес, кая схема предлагаемого механизма (пунктиром показано положение механизма при нахождении поводка в крайней точке дуги охвата гибким эвеном колеса). Механизм содержит колеса 1 равног радиуса, охватывающее их гибкое звен 2,закрепленный на нем по нормали со сторойЬ расположения колес 1 поводок 3,длина которого равна радиусу колеса 1. Поводок 3 снабжен жестко связанным с ним дополнительным плечом А, размещенным с противоположной стороны расположения колес .1. Механизм сн жен также рычагом 5, шарнирно связан ным одним концом с гибким звеном 2, другим - со свободным концом дополни тельного плеча 4. Длина дуги гибкого звена 2 между точками А и С, равная расстоянию между точками крепления ры чага 5 и поводка 3 к гибкому звену 2, должна быть не больше длины дуги охвата колеса 1 гибким звеном 2. Ось шарнира крепления рычага 5 с дополнительным плечом 4 расположена на пер пендикуляре DB, проведенном к середине прямой А, .соединяющей ось шарнира крепления рычага 5 к гибкому зве ну 2 при прохождении поводка 3 в крайней точке С дУги охвата с точкой А, лежащей на продолжении касательной к колесам 1 параллельной линии, соединяющей центры колес 1., на расстоянии, равном длине дуги АС между точками крепления рычага 5 и поводка 3 на гибком звене 2. Механизм работает следующим образом. При вращении колес 1 гибкое звено 2 перемещает поводок 3, причем свобод ный конец поводка 3, размещенного на гибком звене 2 и закрепленного на нем по нормали со стороны расположения колес 1, совершает движение по замкнутой траектории с выстоями в момент огибания поводка 3 колес 1. При этом рычаг 5 с дополнительным плечом 4 поводка 3 обеспечивает надежную фикацию положения поводка 3 по нормали тносительно гибкого звена 2. Предлагаемый механизм обладает широкими функциональными возможностями может быть использован в автоопеаторах, манипуляторах и транспортерах. Формула изобретения Рычажный механизм с гибким звеном, содержащий, по крайней мере, два колеса равного радиуса, охватывающее их гибкое звено и закрепленный на нем по Нормали со стороны расположения колес поводок, длина которого равна радиусу колеса, отличающийс я тем, что, с целью повьш1ения надежности работы, поводок снабжен жестко связанным с ним дополнительным плечом, размещенным с противоположной стороны расположения колес, а механизм - рычагом, шарнирно связанным одним концом с гибким звеном, а другим - со свободным концом дополнительного плеча, длина гибкого звена между точками крепления рычага и поводка не больше дпины дуги охвата колеса гибким звеном, а ось шарнира крепления рычага с дополнительным плечом расположена на перпендикуляре, проведенном к середине прямой, соединяющей ось шарнира крепления рычага к гибкому звену при прохождении Поводка в крайней точке дуги охвата с точкой, лежащей на продолжении касательной к колесам параллельной линии, соединяющей центры колес, на расстоянии, равном длине дуги между точками крепления рычага и поводка на гибком звене. Источники информации, принятые во внимание при экспертизе 1. Кожевников С.Н. и др. Механизмы. М., Машиностроение, 1976, с. 550, рис. 9.32. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПЕРЕМЕННОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ВЕДОМОГО ЗВЕНА ПЕРЕДАЮЩЕГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2189508C2 |
| Кулино-рычажный механизм в.п.саблинаС гибКиМ зВЕНОМ | 1979 |
|
SU808740A1 |
| МЕХАНИЗМ ПРИВОДА ПУАНСОНА УЛЬТРАЗВУКОВОЙ ШВЕЙНОЙ МАШИНЫ | 2024 |
|
RU2829826C1 |
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА | 1996 |
|
RU2107762C1 |
| Устройство для подачи деталей | 1981 |
|
SU1018763A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ КОЛЕСНЫХ ПАР ЛОКОМОТИВНОЙ ТЕЛЕЖКИ В КРИВЫХ | 2005 |
|
RU2286900C1 |
| Привод игольного двухфонтурной основовязальной машины | 1975 |
|
SU557132A1 |